

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Таблица 6 – Список необходимых констант для варианта № 0
Имя переменной | Тип | Атрибуты | Начальное значение | Комментарии |
S0_1 | TIMER | C | 5s | Переход из состояния 0 в состояние 1 |
S1_2 | TIMER | C | 6s | Переход из состояния 1 в состояние 2 |
S2_3 | TIMER | C | 11s | Переход из состояния 2 в состояние 3 |
S3_4 | TIMER | C | 11s50 | Переход из состояния 3 в состояние 4 |
S4_5 | TIMER | C | 12s | Переход из состояния 4 в состояние 5 |
S5_6 | TIMER | C | 12s50 | Переход из состояния 5 в состояние 6 |
S6_7 | TIMER | C | 13s | Переход из состояния 6 в состояние 7 |
S7_8 | TIMER | C | 14s | Переход из состояния 7 в состояние 8 |
Из полученного списка добавить все константы в проект.
Таким образом будет заполнена таблица глобальных переменных (рисунок 58).
|
Рисунок 58 – Список глобальных переменных |
4 привязка переменных к входам и выходам контроллера
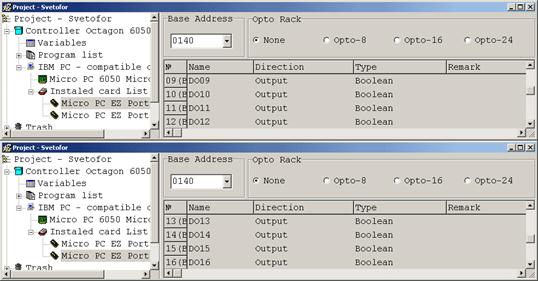
В данном проекте будет использоваться только вывод. Для привязки переменных необходимо выбрать в дереве менеджера проектов первый Micro PC EZ Port и в правой части двойным щелчком по линии вывода № 09 вызвать окно выбора переменной (рисунок 59). Выбор переменной, используемой для линии вывода, должен происходить автоматически, т. е. для линии № 09 будет выбрана переменная DO09. Для подтверждения нажать Ok. То же проделать с линиями № 10, 11 и 12 данного Micro PC EZ Port и линиями № 13-16 другого Micro PC EZ Port (рисунок 60).
|
Рисунок 59 – Окно выбора переменной для связи с линией вывода |
|
Рисунок 60 – Списки связей для двух Micro PC EZ Port |

5 разработка программы
Создание программы производится в списке программ (Program List). Для создания программы выбрать в дереве менеджера проекта список программ. Вызвать контекстное меню щелчком правой кнопки мыши в правой части менеджера проекта и выбрать команду «Новая программа» (New program) (рисунок 61).
|
Рисунок 61 – Добавление новой программы в проект |

В результате появится окно выбора языка программирования, с помощью которого будет формироваться логика программы (рисунок 62). Выбрать Functional Block Diagram (IEC-1131.3) и нажать кнопку Ok, задать имя программы и опять нажать Ok.
|
Рисунок 62 – Выбор языка программирования |

Далее с помощью языка FBD необходимо разработать программу управления светофором в соответствии с вариантом задания. В начале программы необходимо поместить секцию инициализации. Она будет выполнять инициализацию (сброс) таймерной переменной T. В конце каждого периода работы светофора эта переменная должна будет сбрасываться, поэтому перед ней необходимо вставить метку перехода (рисунок 63). Вставить секцию инициализации в программу.
|
Рисунок 63 – Секция инициализации программы управления светофором |

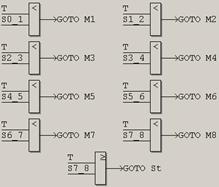
Ниже секции инициализации должна следовать секция условий, определяющих состояния светофора в различные моменты времени. Наиболее простой подход – сравнивать значение переменной T с константами, определяющими моменты переключения, с помощью операции сравнения «меньше чем». Обязательными условиями такого подхода являются: а) размещение операций сравнения по мере возрастания констант; б) в случае истинности обеспечение перехода за пределы секции условий. Таким образом, секция условий состоит из блоков сравнения, выход которых соединён с блоком перехода (GOTO) (рисунок 64), количество которых определяется количеством состояний светофора за период. Для варианта № 0 их количество будет равно 8, конечно же, с разными константами для сравнения и разными метками перехода (рисунок 65). В конце секции перехода размещается ещё один элемент, обеспечивающий конец периода. Он осуществляет переход в секцию инициализации, где происходит сброс таймерной переменной T и период начинается сначала.
|
Рисунок 64 – Элемент секции условий |
|
Рисунок 65 – Секция условий для варианта № 0 |
Для своего варианта создать секцию условий по аналогии.
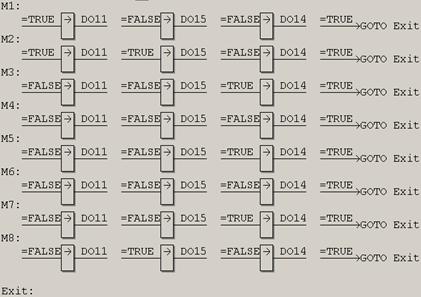
Следующая секция – это секция вывода. Она состоит из элементов, описывающих каждое состояние светофора (рисунок 66). Вертикальный порядок размещения элементов секции вывода не имеет значения. Элемент секции состоит из следующих операций:
- метка перехода – в блоке условий на неё ссылается операция перехода GOTO, выполняющаяся в случае выполнения условия включения описываемого в данном элементе состояния светофора;
- операции присваивания – для задания соответствующих значений переменным, определяющим состояние светофора; количество операций определяется количеством переменных, определяющих состояния светофора (для варианта № 0 их три, потому что три переменных – DO11, DO14 и DO15 полностью определяют состояние светофора); присваиваемое значение должно быть TRUE, если связанный с этой переменной светодиод должен светиться и FALSE в ином случае;
- операция выхода за пределы секции вывода – необходима для предотвращения выполнения других элементов секции вывода.
|
Рисунок 66 – Элемент секции вывода для варианта № 0 |
|
Рисунок 67 – Секция вывода для варианта № 0 |
Для своего варианта по аналогии создать секцию вывода по аналогии.
6 компиляция
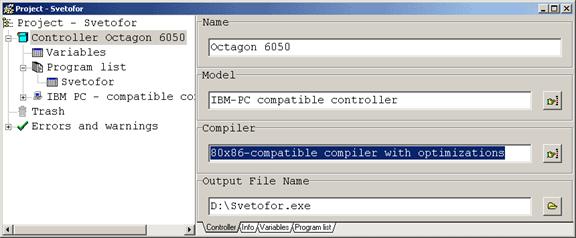
В дереве менеджера проекта выбрать контроллер (Controller). В правой части выбрать тип компилятора – 80x86-compatible compiler (рисунок 68).
|
Рисунок 68 – Выбор компилятора |
Выполнить компиляцию нажатием кнопки «Компиляция проекта» (Compile project) в главном окне среды UltraLogik32 (рисунок 69).
|
Рисунок 69 – Компиляция проекта |

В результате компиляции получится исполняемый exe-файл, имя которого было указано при конфигурации контроллера (рисунок 50).
II Загрузка исполняемого кода в микропроцессорный контроллер 6050
1 сборка лабораторного стенда
Для соединения с PC присоединить 10-контактную розетку кабеля VTC-9F к соединителю порта COM1 микроконтроллера, имеющему позиционное обозначение J3 (рисунок 70).

| ||||
Рисунок 70 – Микроконтроллер с присоединенными шлейфами к последовательному порту COM1 и порту дискретного ввода/вывода |
Для управления светофором присоединить 26-контактную розетку кабеля CMA-26 к соединителю порта дискретного ввода/вывода микроконтроллера, имеющему позиционное обозначение J1 (рисунок 70).
Установить в стандартный конструктив Micro PC плату микроконтроллера, при этом необходимо обязательно убедиться в том, что питание конструктива ОТКЛЮЧЕНО (выключатель блока питания находится в положении «O»).
Установка платы осуществляется таким образом, чтобы элементный слой платы микроконтроллера, в котором расположена ИС ПЗУ с надписью ROM-DOS, находился слева (рисунок 71).
|
Рисунок 71 – Расположение платы МК в конструктиве Micro PC |

После установки платы необходимо присоединить 9-контактную розетку кабеля VTC-9F к последовательному порту COM1 ПЭВМ. При этом нужно обязательно убедиться, что компьютер выключен.
2 передача файла svetofor. exe на flash-память контроллера
Для передачи файлов используется пакет терминального программного обеспечения PC SmartLINK. Запуск пакета осуществляется выполнением файла C:\MPC\sl. exe. Далее подать питание на прибор «Светофор» и на МК. В окне SmartLINK появится загрузочное сообщение:
PhoenixBIOS (TM) A386 Version x. xx
Copyright (C) Phoenix Technologies, Ltd.
All Rights Reserved
Octagon Systems Corp. 40 MHz 60xx CPU
Release vx. xx - mm/dd/yy
Ali 386SX-V8T processor detected operating at 40 MHz
640K Base Memory, 1024K Extended
INT 17h BIOS extension vx. xx
Copyright (c) 1995-97 Octagon Systems Corporation
PICO Flash Array
Copyright (c) 1996,Phoenix Technologies Ltd.
Resident Flash (RFA) OEM Layer
Phoenix PICO Flash Array (TM)
Copyright (c) 1996
Phoenix Technologies LTD
Octagon Systems vx. xx
First drive of size 896K is installed in SSD0 (AMD 1MB flash)
Second drive of size 128K is installed in SSD2 (128K SRAM)
RS-485 support BIOS extension vx. xx
Copyright (c) 1996, Octagon Systems
Starting ROM-DOS...
HIMEM v6.22 (Revision x. xx)
Copyright (c) Datalight, Inc.
VDISK v6.22 (Revision x. xx)
Copyright (c) Datalight, Inc.
Extended Memory Present
VDISK v6.22 (Revision x. xx)
Copyright (c) Datalight, Inc.
Formatting 1024K XMS memory as drive E:
60xx C:\>
С помощью команды transfer e:\svetofor.exe МПК переводится в режим получения исполняемого кода через порт COM1. Нажатием комбинации клавиш <Alt>+<D> на экран монитора выводится диалог обмена файлами PC SmartLINK (рисунок 4.18). В поле Filename диалога обмена ввести имя файла, предназначенного для передачи – svetofor.exe. При вводе имени файла следует указать полный путь к файлу, по которому он расположен, например, D:\svetofor.exe.
Нажатием кнопки Start начинается передача файла на накопитель в МПК.
III Запуск на выполнение переданного файла svetofor. exe
После окончания передачи и возврата в основное окно PC SmartLINK (нажатием <Esc> дважды) можно запустить полученный исполняемый файл командой e:\svetofor.exe.
С помощью прибора имитации работы светофора проверить правильность работы программы и соответствие варианту задания.
Варианты заданий
№ варианта | Используемые светодиоды | № линии EZ-порта используемых светодиодов | Циклограмма работы светодиодов |
| 0 | Красный 1 Зелёный 1.1 Жёлтый 1 | 11 14 15 |
|
1 | Красный 2 Зелёный 2.1 Жёлтый 2 | 16 10 12 |
|
2 | Красный 1 Зелёный 1.1 Зелёный 1.2 Жёлтый 1 | 11 14 13 15 |
|
3 | Красный 1 Зелёный 1.1 Жёлтый 1 Красный 2 Зелёный 2.1 Жёлтый 2 | 11 14 15 16 10 12 |
|
4 | Красный 2 Зелёный 2.1 Зелёный 2.2 Жёлтый 2 | 16 10 09 12 |
|
5 | Красный 1 Зелёный 1.1 Жёлтый 1 Красный 2 Зелёный 2.1 Зелёный 2.2 Жёлтый 2 | 11 14 15 16 10 09 12 |
|
6 | Красный 1 Зелёный 1.1 Жёлтый 1 | 11 14 15 |
|
7 | Красный 2 Зелёный 2.1 Жёлтый 2 | 16 10 12 |
|
8 | Красный 1 Зелёный 1.1 Зелёный 1.2 Жёлтый 1 | 11 14 13 15 |
|
9 | Красный 1 Зелёный 1.1 Жёлтый 1 Красный 2 Зелёный 2.1 Жёлтый 2 | 11 14 15 16 10 12 |
|
10 | Красный 2 Зелёный 2.1 Зелёный 2.2 Жёлтый 2 | 16 10 09 12 |
|
11 | Красный 1 Зелёный 1.1 Жёлтый 1 Красный 2 Зелёный 2.1 Зелёный 2.2 Жёлтый 2 | 11 14 15 16 10 09 12 |
|
12 | Красный 1 Зелёный 1.1 Жёлтый 1 Красный 2 Зелёный 2.1 Зелёный 2.2 Жёлтый 2 | 11 14 15 16 10 09 12 |
|
13 | Красный 1 Зелёный 1.1 Жёлтый 1 Красный 2 Зелёный 2.1 Зелёный 2.2 Жёлтый 2 | 11 14 15 16 10 09 12 |
|
14 | Красный 1 Зелёный 1.1 Зелёный 1.2 Жёлтый 1 Красный 2 Зелёный 2.1 Жёлтый 2 | 11 14 13 15 16 10 12 |
|
15 | Красный 1 Зелёный 1.1 Зелёный 1.2 Жёлтый 1 Красный 2 Зелёный 2.1 Жёлтый 2 | 11 14 13 15 16 10 12 |
|

Контрольные вопросы
1 Назначение и основные характеристики среды UltraLogik32.
2 Алгоритм разработки проекта в UltraLogik32.
3 Заполнение списка переменных.
4 Разработка программ.
5 Конфигурирование микроконтроллера.
6 В чем заключается компиляция проекта, какие компиляторы используются системой?
7 Для чего используется режим Эмуляции?
8 В каких режимах работает отладчик и каково назначение этих режимов?
9 Как производится привязка переменных?
10 Установка статуса программы.
11 «Прозрачный» и «непрозрачный» циклы.
12 Назначение таймерных переменных.
Литература
1 Справка системы UltraLogik32.
2 Octagon Systems Embedded PCs For Extreme Environments, 6000 Series User’s Manual.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
