
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1.6. Электронный регулятор типа ЭРЧМ-30
Успехи развития электронной и микропроцессорной техники дали возможность заменить громоздкие и чрезвычайно сложные гидромеханические регуляторы частоты вращения коленчатого вала дизеля на электронные автоматические системы регулирования частоты вращения. Микропроцессорные автоматические системы регулирования частоты вращения коленчатого вала, установленные на разных типах дизелей, отличаются только управляющей программой. Поэтому может быть создана унифицированная автоматическая система регулирования частоты вращения коленчатого вала для всех типов тепловозных дизелей.
Цифровая автоматическая система обладает повышенной моральной стойкостью по сравнению с аналоговыми регуляторами, так как ее совершенствование связано только с перепрограммированием основного алгоритма при неизменной аппаратной части. По этой причине главное внимание при разработке локомотивных систем с микроЭВМ уделяется вопросам выбора функциональной схемы, организации систем ввода-вывода, создания программного обеспечения, отладки и тестирования оборудования.
Внедрение в локомотивную автоматическую систему микроЭВМ всегда связано с установкой определенного минимума электронного оборудования, которое должно быть экономически оправданным с точки зрения снижения трудоемкости либо существенным улучшением потребительских качеств выпускаемых локомотивов.
Электронная система регулирования частоты вращения и мощности ЭРЧМ30 предназначена для автоматического поддержания заданной частоты вращения и мощности дизеля и автоматического регулирования тока обмотки возбуждения тягового генератора тепловозов всех серий по сигналам, получаемым от цепей управления и собственного комплекта датчиков.
Система позволяет повысить топливную экономичность тепловоза за счет автоматической корректировки настройки тепловозной характеристики по температуре окружающей среды, что обеспечивает поддержание температур теплоносителей системы охлаждения и обмоток тяговых электрических машин в допускаемых пределах. Кроме того, в системе предусмотрены режимы синхронного и асинхронного нагружения секций тепловоза.
|

В состав микропроцессорной системы входят:
1. Электронный блок управления ЭРЧМЗ0 (БУ), предназначен для
приема и обработки сигналов датчиков, команд управления, выдачи сигналов управления на электрогидравлическое исполнительное устройство (ИУ) и блок управления возбуждением (БУВ) тягового генератора.
2. Исполнительное устройство (ИУ) типа ЭГУ 104 предназначено для пропорционального преобразования электрического сигнала электронного блока управления в механическое перемещение (поворот) выходного вала исполнительного устройства, связанного с рейками топливных насосов высокого давления посредством механической передачи.
3. Датчики частоты вращения коленчатого вала дизеля (ДЧД) и ротора турбокомпрессора (ДЧТ), предназначены для преобразования соответственно частоты вращения коленчатого вала дизеля и ротора турбокомпрессора в электрический сигнал переменного тока с частотой пропорциональной измеряемой частоте вращения.
4. Датчик давления наддува (ДДН), предназначен для измерения давления наддувочного воздуха турбокомпрессора и преобразования измеренного явления в токовый сигнал.
5. Датчик давления масла (ДДМ), предназначен для измерения давления масла в масляной системе дизеля и преобразования измеренного давления в токовый сигнал.
6. Программатор (П), предназначен для индикации текущих и заданных параметров системы, а также для корректировки программного обеспечения.
7. Датчик скорости локомотива, предназначенный для преобразования частоты вращения колесной пары в электрический сигнал переменного тока с частотой пропорциональной скорости движения.
8. Датчики выпрямленных тока и напряжения тягового генератора, предназначенные для преобразования этих величин в токовые сигналы.
Электронная система регулирования обеспечивает: пятнадцати позиционное задание частоты вращения коленчатого вала nД с точностью задания ±1 об/мин; вывод реек топливных насосов высокого давления на нулевую подачу топлива при: выключении штатных тумблеров "Топливный насос", обесточивании питающей цепи, обрыве цепей датчика частоты вращения nДили исполнительного устройства; защиту дизеля от снижения давления масла в его масляной системе ниже заданных значений в функции nД и сигнализацию в случае срабатывания этой защиты; ограничение мощности дизеля NЕ при переходных режимах в зависимости от давления наддува; двухступенчатое снижение в мощности тягового генератора (ТГ) при буксовании колесных пар и плавное восстановление ее после прекращения буксования; ограничение мощности тягового генератора при отключении одного из тяговых электродвигателей (ТЭД); ограничение цикловой подачи топлива при пуске дизеля; обеспечение работы силовых установок в режиме секционной тяги; автоматическое отключение функции регулирования тока обмотки возбуждения тягового генератора при переходе на аварийный режим работы генератора с сохранением регулирования частоты nД; автоматическую корректировку настройки характеристики NЕ = f(nД) при температуре окружающей среды То > +15 °С; ограничение тока и напряжения тягового генератора.
Основными узлами исполнительного устройства ЭГУ 104 являются: датчик положения 3 рейки топливного насоса высокого давления, поворотный электромагнит 5 и гидравлический усилитель, содержащий масляный насос 14, приводимый от приводного вала исполнительного устройства, масляный аккумулятор 11, золотник 9 со втулкой 10 и поршень 1 сервомотора, связанный системой рычагов и тяг с силовым валом 4, рычагом 6 поворотного электромагнита 5 и датчиком положения 3.
|

Работает исполнительное устройство следующим образом. Предположим, что на рис.2.13 изображено равновесное состояние подвижных частей исполнительного устройства, соответствующее некоторой силе тока, протекающего по катушке поворотного электромагнита 5. Если ток катушки увеличится, то якорь электромагнита повернется по часовой стрелке на угол, определяемый новым значением тока катушки. При этом золотник 9 сместится вниз и его рабочая кромка откроет доступ масла от масляного насоса 14 под поршень сервомотора 1, в результате чего давление на его обе стороны будет одинаковым. Но так как площадь нижней части поршня больше, чем верхней, и он начнет перемещаться вверх, поворачивая силовой вал 4, который в конечном итоге через систему тяг и рычагов будет перемещать рейки топливных насосов высокого давления на увеличение цикловой подачи топлива. Одновременно будет происходить перемещение вверх подвижного штока датчика положения 3 и золотника 9. Как только золотник займет первоначальное положение, его рабочая кромка перекроет доступ масла под поршень сервомотора 1 и он становится в новом положении. При уменьшении тока катушки поворотного электромагнита перемещения будут происходить в обратном порядке.
Датчик положения имеет катушку, по которой протекает переменный ток высокой частоты, окруженную экраном, механически связанным с его подвижным штоком. Если экран смещается относительно катушки, то меняется ее индуктивное сопротивление. Величина этого сопротивления является сигналом, пропорциональным углу поворота силового вала, то есть фактически положению реек топливных насосов высокого давления.
|
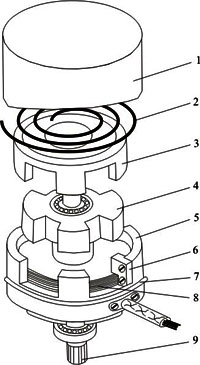
Поворотный электромагнит, катушка 8 которого подключена к электронному блоку управления, выполняет функцию управляющего элемента. Он состоит из корпуса 5, в котором установлены катушка 8 и магнитопровод 4. На валу 9, размещенном в корпусе 5 на двух подшипниках, расположен якорь 3. На одном конце вала 9 укреплен выходной рычаг, а на другом - элементы крепления спиральной пружины 2, жестко связанной с корпусом 5. К одному из полюсов корпуса закреплен упор 6, ограничивающий угол поворота якоря 4. Крышка 1 защищает полость электромагнита от попадания пыли и влаги. Зазор между крышкой и корпусом уплотнен резиновым кольцом 7. Выводы катушки 8 соединяются с контактами штепсельного разъема.
Управление исполнительным устройством производится путем изменения силы тока, протекающего через катушку 8 электромагнита методом широтно-импульсной модуляции. При протекании тока через катушку 8 индуцируется магнитный поток, проходящий через воздушный зазор между полюсами корпуса 5 и магнитопровода 4 и через находящиеся в нем полюса якоря 3. В результате этого возникает электромагнитная сила, стремящаяся втянуть полюса якоря 3 в зазор между полюсами корпуса 5 и магнитопровода 4 и создающая на валу 9 вращающий момент, величина которого пропорциональна силе тока, протекающего по катушке 8. Электромагнитному вращающему моменту противодействует момент, создаваемый спиральной пружиной 2, который пропорционален углу поворота вала 9. Вследствие этого каждому значению тока, протекающего по катушке 8, однозначно соответствует определенный угол поворота вала 9. При изменении тока катушки 8 от 0 до 3А угол поворота вала 9 изменяется 0 до 32°. Если ток катушки 8 увеличивается, то рычаг поворотного электромагнита стремится повернуться по часовой стрелке.
Устройство датчика частоты вращения коленчатого вала дизеля следующее. В корпусе 1 размещается обмотка 2 с сердечником 3, выполненным в виде постоянного магнита. Выводы обмотки соединены с контактами блочной части 5 двухштырькового штепсельного разъема. С целью повышения надежности конструкция датчика неразборная, как после сборки его внутренние полости заливаются эпоксидным компаундом.
|
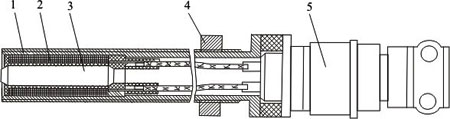
Работа датчика основана на принципе электромагнитной индукции. При приближении ферромагнитной детали к торцу сердечника 3 происходит нарастание магнитного потока, протекающего через сердечник в осевом направлении. Нарастание магнитного потока индуцирует ток прямого (условно) направления в обмотке 2. При удалении ферромагнитной детали от торца сердечника 3 происходит снижение магнитного потока в сердечнике, индуцирующее в обмотке 2 ток обратного направления. На тепловозах в качестве упомянутых ферромагнитных деталей используются зубья валоповоротного механизма. Сердечник 3 датчика устанавливается на расстоянии 0,8 … 1,0 мм от поверхности зубьев. При прохождении их около сердечника в обмотке 2 индуцируется ток с частотой, равной частоте следования зубьев. Величина напряжения, индуцируемого в обмотке 2 прямо пропорциональна частоте следования зубьев. Чем меньше зазор, тем больше величина напряжения.
Датчик частоты вращения ротора турбокомпрессора устроен аналогично.
В качестве датчика давления наддува применяется преобразователь давления КРТ-СТ-0,25-0,5-М, а в качестве датчика давления масла - преобразователь КРТ-СТ-1,6-1-М. Конструкция и принцип действия датчиков одинаковы. Датчик давления наддува измеряет избыточное давление в диапазоне 0 … 0,25 МПа, а датчик давления масла измеряет избыточное давление в диапазоне 0 … 1,6 МПа.
Система обеспечивает различные режимы работы тепловоза. Информация о том, какой режим работы тепловоза задан, система определяет по сигналам, поступающим не дискретные входы блока управления от внешних цепей тепловоза.
В процессе подготовки дизеля к пуску его коленчатый вал не вращается и от датчика частоты вращения сигналы не поступают. Блок управления во внешнюю цепь управляющих сигналов не выдает. При пуске начинает вращаться коленчатый вал дизеля и в блок управления поступает сигнал от датчика частоты вращения коленчатого вала. При достижении частоты вращения коленчатого вала 0,5 … 0,6 с-1 блок управления выдает команду на выдвижение реек топливных насосов высокого давления в положение, соответствующее пусковой подаче и в этом положении фиксирует их до достижения частоты вращения коленчатого вала 4,0 с-1. После достижения частоты вращения коленчатого вала дизеля 4,0 с-1 в работу вступает регулятор частоты вращения коленчатого вала и с заданным темпом выводит дизель в режим холостого хода. От датчика частоты вращения коленчатого вала в блок управления поступает информация о текущем скоростном режиме, которая сравнивается с уставкой задания частоты вращения коленчатого вала. Частоты вращения коленчатого вала изменяется в зависимости от комбинации сигналов, поступающих от контроллера машиниста, и температуры окружающей среды. При имеющемся рассогласовании сигналов блок управления подает соответствующий сигнал на поворотный электромагнит исполнительного устройства, тем самым изменяется подача топлива. Этот процесс продолжается до тех пор, пока фактическая частота вращения коленчатого вала не сравняется с уставкой.
Возможны два режима работы тепловоза под нагрузкой – режим автоматического поддержания заданной скорости движения поезда и режим управления тепловозом без автоматического поддержания скорости движения. В режиме поддержания скорости движения реализуется асинхронная загрузка секций тепловоза - сначала нагружается ведущая секция, далее сила тяги увеличивается за счет нагружения ведомой секции тепловоза.
Переход в режим асинхронной загрузки секций производится тумблером «Поддержание скорости движения поезда» и осуществляется по следующему алгоритму. До третей позиции контроллера включительно автоматические системы обеих секций работают автономно и управляются аналогично серийным тепловозам. Значение частоты вращения коленчатого вала осуществляется положением рукоятки контроллера машиниста, а загрузка дизель-генератора осуществляется по каналу мощности как функция частоты вращения коленчатого вала дизеля.
При переходе на четвертую позицию контроллера машиниста и выше автоматическая система переходит в режим автоматического поддержания заданной скорости движения поезда с реализацией асинхронного нагружения. Частота вращения коленчатого вала ведомой секции автоматически переводится на минимальное значение и соответствующее значение мощности тягового генератора. В зависимости от рассогласования заданной скорости движения поезда и текущей, информация о которой поступает от датчиков угла поворота, установленных на буксах третьей колесной пары каждой секции тепловоза.
В случае, когда ведущая секция достигла номинальной мощности, а рассогласование между заданной и текущей скоростью движения поезда не устранено, ведомая секция начинает автоматически увеличивать мощность дизель-генератора до устранения рассогласования между заданной и текущей скоростью движения поезда.
Если текущая скорость движения поезда превысит заданную, ведомая секция начинает разгружаться, в то время как ведущая секция будет продолжать работать на номинальном режиме. Если ведомая секция полностью разгрузится, а текущая скорость движения будет превышать заданную, блок управления начинает разгружать ведущую секцию до устранения рассогласования между заданной и текущей скоростью движения поезда.
При переводе рукоятки контроллера машиниста на третью и ниже позиции режим поддержания скорости движения отключается, а автоматические системы обеих секций тепловоза работают автономно.
