
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1.Классификация, структурные схемы процессоров и их сравнительная оценка.
Основные составляющие ЦП:
1. Одно или несколько АЛУ
2. Регистровая память
3. Устройство управления
4. Внутренняя (кэш) память
5. Система прерываний
6. Средства для организации шинного интерфейса.
![]() Двумя основными архитектурами набора команд, используемыми компьютерной промышленностью на современном этапе развития вычислительной техники являются архитектуры CISC и RISC. Лидером в разработке микропроцессоров c полным набором команд (CISC - Complete Instruction Set Computer) считается компания Intel со своей серией x86 и Pentium. Эта архитектура является практическим стандартом для рынка микрокомпьютеров. Для CISC-процессоров характерно: сравнительно небольшое число регистров общего назначения; большое количество машинных команд, некоторые из которых нагружены семантически аналогично операторам высокоуровневых языков программирования и выполняются за много тактов; большое количество методов адресации; большое количество форматов команд различной разрядности; преобладание двухадресного формата команд; наличие команд обработки типа регистр-память.
Двумя основными архитектурами набора команд, используемыми компьютерной промышленностью на современном этапе развития вычислительной техники являются архитектуры CISC и RISC. Лидером в разработке микропроцессоров c полным набором команд (CISC - Complete Instruction Set Computer) считается компания Intel со своей серией x86 и Pentium. Эта архитектура является практическим стандартом для рынка микрокомпьютеров. Для CISC-процессоров характерно: сравнительно небольшое число регистров общего назначения; большое количество машинных команд, некоторые из которых нагружены семантически аналогично операторам высокоуровневых языков программирования и выполняются за много тактов; большое количество методов адресации; большое количество форматов команд различной разрядности; преобладание двухадресного формата команд; наличие команд обработки типа регистр-память.
 Основой архитектуры современных рабочих станций и серверов является архитектура компьютера с сокращенным набором команд (RISC - Reduced Instruction Set Computer). Основной её принцип таков: любая команда должна выполняться за один такт. Традицию упрощения архитектуры С. Крэй с успехом применил при создании широко известной серии суперкомпьютеров компании Cray Research. Однако окончательно понятие RISC в современном его понимании сформировалось на базе трех исследовательских проектов компьютеров: процессора 801 компании IBM, процессора RISC университета Беркли и процессора MIPS Стенфордского университета.
Основой архитектуры современных рабочих станций и серверов является архитектура компьютера с сокращенным набором команд (RISC - Reduced Instruction Set Computer). Основной её принцип таков: любая команда должна выполняться за один такт. Традицию упрощения архитектуры С. Крэй с успехом применил при создании широко известной серии суперкомпьютеров компании Cray Research. Однако окончательно понятие RISC в современном его понимании сформировалось на базе трех исследовательских проектов компьютеров: процессора 801 компании IBM, процессора RISC университета Беркли и процессора MIPS Стенфордского университета.
Среди других особенностей RISC-архитектур следует отметить наличие достаточно большого регистрового файла (в типовых RISC-процессорах реализуются 32 или большее число регистров по сравнению с регистрами в CISC-архитектурах), что позволяет большему объему данных храниться в регистрах на процессорном кристалле большее время и упрощает работу компилятора по распределению регистров под переменные. Для обработки, как правило, используются трехадресные команды, что помимо упрощения дешифрации дает возможность сохранять большее число переменных в регистрах без их последующей перезагрузки.
2. Классификация, функции, основные характеристики устройств управления ЭВМ.
Классификация УУ:
1. синхронные – длительность цикла постоянна
2. синхронно - асинхронные – длительность цикла переменная, длительность такта постоянная.
3. Асинхронные – переменная длительность цикла и такта.
Различают следующие виды управления:
1. централизованное
3. смешанное
Этапы управления:
1. чтение команды и хранение
2. дешифрация команды
3. формирование адреса следующей команды
4. исполнение
5. запись результата
С точки зрения методов используемых для формирования функциональных сигналов, выделяют:
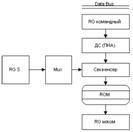
1. Схемно-логическое. Последовательность формирования функциональных сигналов задается схемой соединенных элементов.
2. Микропрограммное. Правила формирования функциональных сигналов хранятся в памяти УУ.
Схемно-логические УУ быстрее микропрограммных и более удобны с точки зрения проектирования и производства.
3. Структуры команд ЭВМ, адресность ЭВМ. Место адресного сопроцессора в структуре ЭВМ.
Команды традиционного машинного уровня можно разделить на несколько типов
1. Арифметические и логические. Целочисленные арифметические и логические операции: сложение, вычитание, логическое сложение, логическое умножение и т. д.
2. Пересылки данных. Операции загрузки/записи.
3. Управление потоком команд. Безусловные и условные переходы, вызовы процедур и возвраты.
4. Системные операции. Системные вызовы, команды управления виртуальной памятью и т. д.
5. Операции с плавающей точкой. Операции сложения, вычитания, умножения и деления над вещественными числами.
6. Десятичные операции. Десятичное сложение, умножение, преобразование форматов и т. д.
7. Операции над строками. Пересылки, сравнения и поиск строк
Этапы исполнения команд:
1. чтение команды
2. декодировка
3. формирование адреса операнда
4. чтение операнда
5. иполнение
6. формирование адреса результата
7. запись результата
Машину называют адресной, если в системе имеются адресные команды, если таковых нет, то машина называется безадресной.
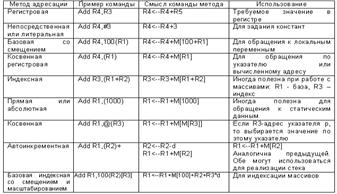
Основные виды адресации:
4. Этапы исполнения команд, рабочий цикл процессора. Конвейер команд.
Этапы исполнения команд:
1. чтение команды
2. декодировка
3. формирование адреса операнда
4. чтение операнда
5. иполнение
6.1 формирование адреса результата
6.2 запись результата
Классический вариант исполнения — последовательный. В этом случае используется конвейерный способ исполнения команд. Для последовательного способа характерна следующая структура:
Чтобы создать конвейер, ФБ нужно разбить на несколько независимых. Каждый ФБ должен иметь собственное УУ и должно существовать одно центральное.
Можно поставить между блоками дополнительные буферные регистры, это позволит сгладить неравномерность поступления команд по времени. Лучшим выходом будет, если буферный регистр заменить заменит последовательностью регистров, образующих стек типа FIFO.
Конвейер:
см. этапы команд.
ž - конфликт, т. к. необходимо прочитать2 слова из ОП одновременно.
Å - конфликт, т. к. в АЛУ необходимо выполнить, 2 операции одновременно. Если бы было два ФБ, то конфликта бы не было.
Причины возникновения конфликтов – разное время, на выполнения различных команд. Чем меньше степень разбиения, тем больше конфликтов конвейера. Сколько уровней конвейера, столько команд может выполняться одновременно.
ФБ должен транслировать данные со входа на выход. При NOP – на выход ничего не подается.
Факторы, снижающие производительность конвейера:
1. Когда для вычисления следующей операции требуется результат предыдущей.
2. При ветвлении
3. При прерываниях и переключениях программы.
4. Различное время использования различных этапов и команд.
5. Структуры, сравнительная оценка микропрограммных и схемно-логических устройств управления.
Микропрограммирование – способ и реализация функция управления.
Виды микропрограммного управления:
1. Горизонтальный: «+» – возможность получить max производительность на уровне МК, «-» – большая разрядность.
2. Вертикальный: «+» – min аппаратурные затраты, «-» – min производительность
3. Смешанный: «-» – тяжело проектировать
4. Двухуровневый
Схемно-логические устройства:
1.Увеличение быстродействия, возможностями параллельной обработки.
Несовместимые микрооперации:

Функционально несовместимые – выполнять одновременно нельзя
Алгоритмически несовместимые – не надо выполнять вместе
2. Каждая микрокоманда имеет свой двоичный код
Низкое быстродействие. Малый размер микрокоманды.
![]()
3. Y = – поля команды
Y1, …, Yk – внутри этих полей микрооперации не совместимы – вертикальное программирование
Между полями – горизонтальное программирование – параллельное выполнение
Недостатки:
1.Сложно дополнять команды
2.Необходимо в каждом поле иметь операцию NOP
4. Motorola
– высокое быстродействие
– легко добавлять команды
– возможен 4-6 уровневый конвеер
6. Способы адресации микрокоманд и их сравнительная оценка. Реализация ветвлений в микропрограммах.
1. Естественная адресация (оборудования – min)
2. Относительная и индексная адресация
3. Конкатенация адресных полей
4. Принудительная адресация полноразрядный адрес (оборудования – max, время формирования адреса - min)
Адресное поле МК содержит адрес следующей микрокоманды.
Когда говорят про адресацию – нужно иметь ввиду линейные участки (адресные поля отсутствуют, работает счетчик), инкремент и переходы (условные, безусловные).
Ветвление в микропрограммах.
1.Безусловный переход
0 | Формирование управляющих сигналов |
1 | Адрес перехода |
\– тип микрооперации
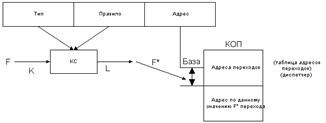
2. Двунаправленный переход
Тип перехода | Номер условия и правила его формирования | Адрес |
Код МК – инструкция секвенсора | Код | на адресных входах MUX |
 |
Выход: объединение естественной и принудительной адресации
 |
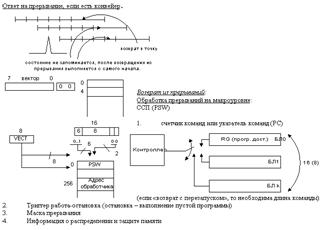
8. Определение допустимого момента прерывания. Организация вхождения в прерывающую программу, возврат к прерванной программе.
Организация вхождений (нужно решить 2 задачи):
1. Какую программу прервать
А) перед чтение следующей команды (после завершения текущей). Обработка на машинном и макропрограммном уровне.
Б) В процессе выполнения операции, но после завершения микрооперации. Обработка на микропрограммном уровне.
2. Как выбрать программу обработки
Внутренние прерывания – можно обработать только на микропрограммном уровне
Внешние можно обработать как на микро-, так и макро-уровне.
Запоминание PSW.
1. В ОП памяти. Для формирования адресов используется вектор прерывания.
Существует таблица PSW «старых» и «новых» программ.
Недостатки:
1. Нет возможности вложенных прерываний по одному вектору.
2. Неперемещаемость таблиц (можно исправить).
2. Использование стека.
3. СУПЕР ЭВМ
Применяется в суперЭВМ.
Преимущества: скорость, возможность вложенных прерываний
 |
Недостатки: ограничение числа прерываний
7. Прерывание программ. Этапы обработки прерываний; структуры систем прерываний и их сравнительная оценка.
Прерывание программы – это временное прекращение текущей программы при возникновении каких-то ситуаций.
Типы прекращений:
1. полное прекращение
2. прерывание
3. приостановка
trap – внутренние прерывания (особые ситуации). Синхронные прерывания, возникают всегда в одном месте.
interrupt – внешние. Асинхронные прерывания, наступают в произвольное время в любом месте.
Любая система прерываний должна выполнять:
1. Организацию вхождений прерывающих программ.
2. Осуществлять приоритетный выбор между запросами, поступающими одновременно.
3. Обеспечение выборки управления приоритетами между прерывающей и прерываемой программой.
4. Обеспечивать возврат к прерванной программе.
Характеристики:
1. Время реакции – tр
2. Время обслуживания – tобсл = tз + tв
3. Глубина прерывания –количество вложенных программ минус 1.
 |
Структуры систем прерываний:
Структуры – способ передачи запроса в ЦП и способы идентификации источника.
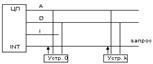
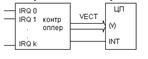
1.С одной линией запроса
Структура предполагает программное распознавание источника; аппаратные запросы
– последовательный опрос RG S устройства. Адрес однозначно идентифицируется устройством, а RG S – определяет причину.
«-» – последовательный опрос (для большого количества устройств). Tпередачи вектора = Tопроса устройств
«+» – простота реализации

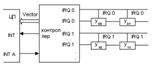
2. Структура с одной линией запроса и последовательной цепочкой сигналов подтверждения
По другому – цепочка переключений; более быстрая и аппаратно сложная.
Идентификация устройства осуществляется через вектор. Устройства восстанавливают запрос. Развивая цепь подтверждений. Как только устройство выдает запрос – оно разрывает цепь. Приоритет устанавливается порядком подключения устройств сигналом INT A.
Работа (устройство ЦП):
1. Формируется запрос INT A.
2. Формируется запрос INT A – устройство сформировавшее запрос, разрывает цепь
3. Устройство получает INT A: D : = VECT, C : = “VECT”
4. Чтение вектора INT A: = 0
5. Устройство получает INT A : = “0”: сбрасывается вектор, сбрасывается запрос и восстанавливается линия распространения сигнала INT A.
3. С индивидуальными линиями запроса.
4. Если много устройств, то объединяют второй и третий вариант.
Два варианта борьбы с зависание (для второго варианта):
1.От последнего устройства подать запрос обратно
2.Запуск TIME после запуска INT A
9. Структура памяти ЭВМ. Способы организации оперативной памяти.
Оперативная память (ОП) имеет многоуровневую организацию (иерархическую структуру).

Классификация:
1. Физическая природа элементов, хранящих информацию. (Наиболее известные: полупроводники, магнитная поверхность, оптические.)
2. По характеру участия в вычислительных процессах
- внешние
- основные
- оперативные
- сверхоперативные
3. По способу доступа к единицам информации
- с последовательным доступом (магнитная лента)
- с прямым доступом (HDD)
- с произвольным доступом
Сверх ОП как с произвольным так и с последовательным доступом.
4. По способу поиска информации
- адресные ЗУ
- безадресные ЗУ (стек и ассоциативные ЗУ)
5. По кратности записи информации
- с перезаписью
- без перезаписи
Организация ОП
I. Многоблочная ОП

Можно делать память переменного объема
Можно выиграть на времени дешифрации адреса
II. ОП с расслоением обращений
Идея: если есть блочная ОП, тогда можно заставить эти блоки работать параллельно. Механизм расслоения обращений реализуется через расслоение адресов.
III. Многопортовая ОП
Нужна если есть многопроцессорная система. ОП должна иметь внутренние системы управления и арбитры.

10. Назначение структурная организация кэша, место кэша в структуре процессора.
Кэш – сверхоперативная память.
Пока элементная база медленной памяти будет значительно дешевле, чем быстрая, применение кэш-памяти будет экономически эффективно.
Устройство управления памятью (УУП, Memory Management Unit-MMU ) – занимается преобразованием виртуальных адресов в физические.
Вариант 1: Вариант 2:

 VA – вирт. адр.
VA – вирт. адр.
A – физ. адр.
Вар. 1. При переключении процессора с одной программы на другую нужно очистить кэш и заполнить нужными данными.
Вар. 2. В этой схеме кол-во удачных обращений 95% и меньше время обращения к кэшу, чем в первой.
Кэш повышает производительность, в нем хранится информация, которую процессор использует наиболее часто.
Различают:
1) кэш команд
2) кэш данных
3) кэш команд и данных
4) адресный кэш – СОЗУ, исп. для преобраз. VA в A.
Варианты: 1) внутрикристальный – первичный
2) внутриплатный – вторичный
На вероятность успешного обращения влияют:
1. Алгоритм swapping’а (алгоритм записи из ЦП в кэш и в ОП).
2. Алгоритм или стратегия замещения информации в кэше, процедура чтения информации из ОП в процессор и кэш.
Эффективное время обращения tэф = tпоиска. кэш.+P*t обр. к кэшу +(1-P)*t чт. ОП,
где P – вероятность удачного попадания.
Пример: tпоиска . кэш=5, P=0.95, t обр. к кэшу=10, t чт. ОП=70.
t = 70 – без кэша.
t = 18 – с кэшем.
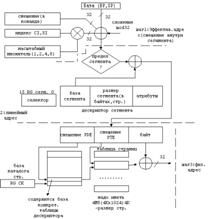
Организация кэша:
ПО – признак опроса (в кэше)![]()
Чтение из памяти производится блоками. В начальный момент кэш пуст, процессор выдает адрес команды, эта команда передается в ЦП и записывается в «слово 0», в слова 1,2,3 записываются последующие команды.
Вообще же при работе с данными, они выравниваются до размера блока (например 3-х байтные до 4-х.)
Варианты реализации:
1) Делать в ОП RG адреса, который будет формировать блок из слов и передавать их в кэш, увеличивать блок, например до 8-ми слов – невыгодно.
2) Кэш с прямым отображением.
Промежуточный вариант м/ду кэшем с прямым доступом и кэшем с ассоциативной памятью – мнгогоклассовый кэш.
кэш с прямым доступом
11. Виртуальная память и ее организация в ЭВМ. Организация, хранение, использование страничных таблиц.
Виртуальная память – разделение адресного пространства на два (СП+НДД)
Упрощенное представление:
 |
адресное пространство – физическое адресное пространство;

- адресное пространство пользователя.
Требования:cvh
1. Во внешней памяти достаточно места для всех программ.
2.
 |
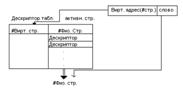
Соответствие виртуального и физического адресов ВАП-виртуальное адресное пространство.

 |
Каждая строка табл.-дескриптор страницы, он задает соответствие между вирт. и физ. номером страницы.

Одним из вариантов распределения динамической памяти является виртуальная память.


При чисто страничной организации размер стр. одинаковый.
Чем меньше будет размер стр., тем больше размер табл. стр. При однопрограммном режиме в активных таблицах содержаться дескрипторы тех страниц, с которыми работает в данный момент ЦП. Дескрипторы полной и активной таблицы отличаются друг от друга битом присутствия дескриптора активной таблицы.
Стр. табл. должна однозначно соответствовать любой прогр. Виртуального адреса различных программ могут совпадать. Чтобы не снижать проиводительности, стр. табл. разбивается нкак быа 2 части(есть полная стр. табл. в ОП, есть копия части этой табл. – акт. часть стр. табл. в сверхОП).
Активная таблица хранит дескрипторы тех таблиц, с которыми работает ЦП. Дескриптор полной табл. отличается от дескриптора акт. табл. битом присутствия. Акт. табл. хранится в сверхОП.
tОбр за инф = 2tОП
 tОбр за инф = tОП + tСОП
tОбр за инф = tОП + tСОП
![]() Размер страниц – 4 кБ. Программа может быть выделено целое число страниц. Делать меньше страниц – плохо, растет размер табл. стр. и придется обновлять акт. табл в КЭШе. Больше – плохо, т. к. увеличится емкость неиспользованной ОП. В среднем теряется 0,5 стр. на программу(или на сегмент). Это фрагментация ОП. Устранить – сделать переменным размер стр. Размер стр. наращивать блоками.
Размер страниц – 4 кБ. Программа может быть выделено целое число страниц. Делать меньше страниц – плохо, растет размер табл. стр. и придется обновлять акт. табл в КЭШе. Больше – плохо, т. к. увеличится емкость неиспользованной ОП. В среднем теряется 0,5 стр. на программу(или на сегмент). Это фрагментация ОП. Устранить – сделать переменным размер стр. Размер стр. наращивать блоками.
Нужна проверка на выход за границу сегмента.
Активная таблица хранится в сверхОП и выглядит:
Обычно размер стр= 4кБ, в некоторых ЭВМ в структуре дескриптора есть бит, который позволяет изменить размер стр. на больший.
12. Замещение страниц при страничной организации памяти.
Необходимо загрузить страницу с внешнего устройства:
1. Место в ОП есть - все нормально
2. Места в ОП нет, значит его надо освободить - выгрузить какую-то неактивную страницу.
При обращении к странице в первую очередь устанавливается бит активности
Главная задача - определить какую страницу следует выгрузить.
Алгоритмы замещения:
1. Алгоритм Михновского-Мира - минимальное количество замещений страниц для конкретного потока обращений. Идея: выгрузка страницы, обращение к которой будет наиболее поздним.
2. ОРТ - алгоритм (optimal) - минимум среднего количества замещений выгружается стр., вероятность обращения к которой не больше, чем к любой другой из ОП.
Эти алгоритмы физически нереализуемы (необходима информация о странице в будущем).
3. LRU (Least Recently Used) удаляется тот блок, который меньше всего используется.
4. FIFO
5. LIFO
6. Блок, в который не было записи и который не активен.
7. Приоритетный стек
13.Формирование адресов при странично-сегментной организации памяти на примере микропроцессора Intel 486 (Pentium)
Упрощенная схема формирования адресов.
После первого шага формируется один адрес.
При формировании 32-разр. адреса можно использовать любой из RG общего назначения (CS, DS, ES, IS)
RPL – запрашиваемый уровень привелегий (TI=0)
GDTR – глобальная таблица дескриптора сегмента (TI=1)
LDTR – локальная таблица дескриптора сегмента (TI=1)
82.2
GDTR и LDTR – отражают распределение сегментов.
Дескриптор страницы:
D – Dirty (бит изменения)
A – актив. стр.
PCD – бит запрещающий кэширование стр.
PWT – бит управления режимом кэширования
1 – сквоз. запись (SWOP)
0 - обратная
U/S – user/system
R/W – read/write
P – присутствие стр. в ОП
Дескриптор сегмента
G – гранулятор (размер сегм. в байтах, либо стр.)
D – размер по умолч. (0 – 16 разр. команды, 1 – 32 разр. команды)
X - резерв P - присутствие
U – user DPL – уровень привелег. дескриптора
A – активность S – система ……….. сегмент.
ТИП – определяет целевое использование сегм. , т. е. определяет допустимые операции в сегменте.
14. Архитектура, организация ввода-вывода в ЭВМ. Ввод-вывод с прямым доступом к памяти. Основные функции контроллера ПДП.
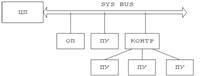
В общем случае это обмен информацией между ПУ и процессором (ОП). Ввод-вывод осуществляется асинхронно по отношению к ЦП или ОП
1.Структура с разделенными устройствами
Характерна для мини-ЭВМ
2.Организация вв/вывода.

1)Условный программный (инициатором явл. ЦП)
2)Инициатор – периф. Устройство (ПУ)
3)В/в с прямым доступом к памяти
Еще два варианта организац. адресн. пространства
1)С разделенным адр. пр-ом (АП) ОП и в/в
2)АП ЦП одно – с отображением в памяти
1. Программно-управляемый и условный вв/выв.
 |
Можно использовать, если переферия работает очень быстро.
2.Вв/выв по прерыванию (производительность выше)
 |
3.ПДП
Управление обменом возлагается на контроллер ПДП. Контроллер берет на себя все ф-ии упр-ия, минуя RG (минуя ЦП). Полное управление системной шиной.
Отношение ф-ии контроллера
 |
1.Должен формировать ADR ОП и сигналы управления адресными шинами
2.Упр-ие пересылкой данных
3.Упр-ие окончанием процедуры вв/выв и сообщать об этом ЦП. Определение момента - ……….. переданных байтов.
4.Упр-ие режимом (формирование сигналов направления передачи, вв/выв)
2 типа контроллеров
1. один контр. На несколько ПУ
2. на каждое ПУ свой контр-р
-Повторяющийся вв/выв ПДП
нужно добавить два регистра и счетчик
1.Медленному устройству дается наибольший приоритет
2……….. имеется контроллер, ЦП должен отключаться от шины. Все устр-ва должны переходить в среднее состояние.
3.Включение питания
Все устройства при включении питания свои вых. должны устанавливать в 3-е состояние.
4.Если использовать DRAM (необх. регенерация). Если имеется контроллер ПДП, он берет на себя регенерацию.
15. Сопроцессоры (каналы) ввода-вывода: назначение структуры, режимы работы. Основное отличие сопорцессора ввода-вывода и контроллера ПДП.
Предназн. в большей степени для архитектуры с разделенной ОП.
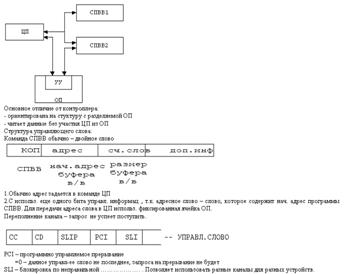 |
В ЦП команда – указание обработать ряд чисел
16. Структура команд сопроцессора ввода-вывода. Запуск сопроцессора.
Аналог. слово состояния процессолра
В него входит содержимое RG СПВВ, ПУ – RG состояния, адрес следующ. Управляющего слова.
MUX и селектор
MUX - обмен с несколькими устройствами
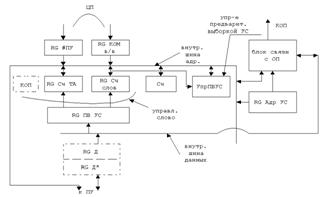 |
Селектор - обмен с одним устройством.
Когда RG сч слов маленьк, КОП - , активизируется процедура ПВ управляющего слова
1.ЦП→#ПУ, КОМ в/в
СП→сост
2.Чт. АС в RG Адр. УС
3.Чтение УС по содержимому RG Адр. УС
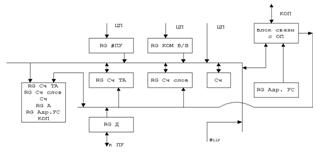 |
4.Обмен (по запросу ПУ)
MUX
1.ЦП→#ПУ, ком в/в
2.Чтение АС в RGАдр. УС
3.Чтение УС по содерж. RG Адр. УС
4.Запись содерж. RG-ов в память подканалов по адресу из RG #ПУ. Ожидание ГрБ обмена от ПУ.
Запросы от сопроцессора имеют более высокий приоритет в ОП, чем от ЦП.
17. Принципы организации контроля функционирования ЭВМ. Классификация методов
 |
контроля и их краткая характеристика.
Оперативный контроль- это контроль, который производится постоянно:
- сквозной – контролируется все;
- локальный – конкретный элемент(участок).
Встроенный контроль: в систему встраиваются специальные датчики, которые контролируют электрические параметры. Чаще всего используются в источниках питания.
Программно-логический контроль.
1. Метод программного счета. Одна и та же программа прокручивается несколько раз. В итоге получаем результат. Если все хорошо, то достаточно прогнать 2 раза. Но этот метод не дает точных сведений.
2. Метод обратного счета. Сначала решается прямая задача, затем она же, но наоборот.
“-”: надо писать 2 программы, сравнивать результаты прямого и обратного счета с учетом погрешностей.
3. Решение задачи по двум алгоритмам: более и менее точному.
4. Метод контрольных точек. В этом случае в программу вводится процедура для выполнения контроля. Этот метод реагирует не на случайные ошибки, а на отказ.
Второй и третий методы выявляют ошибки и случайные, и отказ, но с точки зрения затрат и сил они особенно неудобны.
Наибольшую вероятность обнаружения дает циклическое суммирование.
Аппаратный контроль.
Кратность ошибки – количество искаженных разрядов. Чтобы обнаруживать ошибки кратности d, надо иметь минимальное кодовое расстояние: l>2d+1.
Контроль арифметических и логических операций.
1. Цифровой контроль по модулю
2. Контроль по паритету.
Во 2-м методе контрольные разряды – это остаток от деления цифр числа на выбранный модуль.
18. Решающие усилители. Приницпы построения, схемы цифро-аналоговых преобразователей код – напряжение.
|
Операционный усилитель - инвертирующий усилитель постоянного тока с большим коэффициентом усиления и высоким входным сопротивлением.
|
Kȴ
![]()
![]()
|
|
У усилителя должно быть большое входное сопротивление ( в идеале бесконечность). При больших R они сопоставимы с Rвх ОУ, что приводит к дополнительным погрешностям.
Интегратор можно использовать в качестве фильтра НЧ.
|
Как включать ОУ
Непрятная особенность - дрейф «0», который связан с температурным фактором.
ЦАП N®U
1. Взвешенные резистивные сетки или делители
2. Цепочечные (лестничные) делители.
1. Недостаток в том, что в схеме очень много номиналов резисторов.
2. Сетка R-2R
|
Для прямого включения необходим хороший источник (с малым внутренним сопротивлением)
19. Параметры цифро-аналоговых преобразователей.
h=(Umax-Umin)/(2n-1) - для двоичного кода.
Разрешающая способность преобразования - нименьшее значение ступени квантования, которое представляет наименьшее изменение выходной аналоговой величины.
У реальной характеристики ступень квантования в разных точках различная, поэтому используется среднее значение ступени квантования по всему множеству.
Точность ЦАП характеризуется рядом отклонений реальной характеристики от идеальной.
1. Нелинейность.
2. Дифференциальная нелинейность.
3. Монотонность.
4. Смещение начальной точки характеристики преобразования.
5. Смещение конечной точки хаарктеристики преобразования от номинала.
Нелинейность измеряется в долях единицы младшего разряда.
dL=Dx/h*100%, dL=Dx/Xk
Dx - максимальное отклонение характеристики от заданной прямой.
Xk - значение в конечной точке характеристики преобразования.
![]() - дифференциальная нелинейность.
- дифференциальная нелинейность.
h - действительное значение ступени квантования.
![]() - среднее
- среднее
Дифференциальная нелинейность в ЦАП указывается для худшего случая.
Монотонность - неизменность знака приращения выходной величины при последовательном изменениивходного кода.
Крутизна (коэффициент) преобразования - это крутизна аппроксимирующей кривой.
|
Величина отклонения реальной величины от идеальной считается в конечной точке.
Причины смещения.
1. Дрейф «0».
2. Управляющие сигналы могут поступать в аналоговую цепь (зависит от конструкции)
При разводке цепей аналоговые проводники и земля должны быть соединены в одной точке.
Аналоговую землю разводят пауком, и в ряде случаев в этой точке соединяют с цифровой (исходя из минимальности помех).
Динамические параметры.
Время установления входного сигнала - это время между тем, как переключился вход, и временем, когда выходной сигнал будет отличаться от нужного не более чем на 0,5 EMP.
Время задержки - это время от 0,5 логического сигнала до 0,5 выходного. Другой вариант: tзад - от 0,1 Uвых до 0,9 Uвых.
Скорость нарастания выходного сигнала - отношение приращения выходной аналоговой величины ко времени, за которое это приращение произошло. Чаще всего измеряется при помощи значения tз.
Время переключения - от момента изменения кода до 0,9 Uвых.
20. Алгоритмы работы, схема аналого-цифровых преобразователей напряжение - код.
АЦП U®N
|
1. Преобразование напряжения входов может происходить:
· с промежуточным преобразованием U®T®N
· без промежуточного преобразования U®N
2. Без обратной связи, с обратной связью.
Fкв>=2fв
Схема АЦП 1 1
Для повышения точности нужно использовать ОС.
|
АЦП 2 2. Схема медленная.
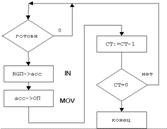
Схема АЦП последовательного счета.
Частота генератора на статическую погрешность не влияет. Динамическая погрешность - неоднородность времени срабатывания входа.
АЦП поразрядного преобразования (на основе алгоритма половинного деления)
|
В регистре сдвигается «1». Для работы требуется 4 такта. Повышается быстродействие схемы.
Схема прямого кодирования (непосредственного счета).
21. Параметры аналого-цифровых преобразователей.
Статические параметры:
1. Количество разрядов.
2. Храктеристики преобразования.
Напряжение межкодового перехода - такое входное напряжение, статистическая вероятность которого в заданное и предшествующее заданному значению кода равны.
Разность двух соседних значений НМП - шаг квантования характеристики преобразования АЦП.
Отличия реальной характеристики от идеальной:
1. Смещение «0»
2. Отклонение конечной точки характеристики преобразования.
3. Нелинейность (отклонение действительной от идеальной).
4. Дифференциальная нелинейность - отклонение действительного значения шагов квантования от их среднего значения.
5. Зона неопределенности НМП.
Динамические характеристики.
1. Время преобразования.
2. Частота преобразования.
3. Апертурное время.
4. Апертурная неопределнность (дрожь).
5. Монотонность характеристики преобразования при максимальной допустимой скорости изменения входного сигнала.
6. Отношение сигнал/шум.
1. Время от момента начала изменения входного сигнала до формирования кода на выходе.
2. ![]()
3. Это время, характеризующее неопределенность между значением кода и временем, к которому этот код относится.
4. Это случайное изменение апертурного времени в конкретной точке характеристики апертурного преобразования.
