
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
КАЛИБРОВКА ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ
НА ГРУБЫХ СТЕНДАХ С УЧЁТОМ РАЗНЕСЕНИЯ
ЧУВСТВИТЕЛЬНЫХ МАСС НЬЮТОНОМЕТРОВ
[1], [2], [3], [4]
МГУ им. , Лаборатория управления и навигации,
Москва, Россия, e-mail: a. kozlov. *****@***com
Аннотация
Ключевые слова: Инерциальная навигационная система, калибровка,
оптимальное оценивание, фильтр Калмана
Калибровка блока чувствительных элементов бескарданных инерциальных навигационных систем (БИНС), авиационных курсовертикалей и т. п. включает в себя проведение специальных испытаний, направленных на определение параметров инструментальных погрешностей инерциальных датчиков, входящих в состав системы.
В более ранних работах описан способ калибровки БИНС в сборе, основанный на методах линейного оценивания, пригодный для калибровки систем любого класса точности на грубом одностепенном стенде с горизонтальной осью вращения. Калибровочный эксперимент, согласно методике, состоит из трех циклов вращения, в каждом из которых одна из приборных осей с точностью до погрешностей установки совмещается с осью вращения стенда. С целью оценки температурных зависимостей такие эксперименты проводятся при различных температурах с последующей линейной интерполяцией параметров инструментальных погрешностей БИНС. Предлагаемая работа посвящена развитию указанного метода, позволяющему вместе с повышением точности калибровки ослабить требования к ее проведению.
Описанный ранее метод не учитывал возможность разнесения чувствительных масс ньютонометров от оси вращения стенда. Это приводило к необходимости близкого расположения системы к оси вращения и не допускало, например, одновременную калибровку нескольких систем на одном стенде. В настоящей работе описано развитие метода с учётом разнесения чувствительных масс ньютонометров. Приведены результаты обработки данных калибровочных экспериментов и численного моделирования.
При этом геометрические параметры разнесения могут вычисляться в процессе калибровки наряду с остальными параметрами инструментальных погрешностей при больших угловых скоростях вращения стенда (60 градусов в секунду и более). А потому из требований к проведению калибровочного эксперимента исключается и необходимость близкого расположения чувствительных масс ньютонометров к оси вращения, и необходимость измерения смещений чувствительных масс от оси вращения. Это позволяет, например, проводить калибровку нескольких БИНС одновременно на одном стенде.
1. Калибровка как задача оптимального оценивания.
Набор оцениваемых параметров инструментальных погрешностей датчиков включает в себя: смещения нулевых сигналов ньютонометров и датчиков угловой скорости (ДУС), погрешности их масштабных коэффициентов, перекосы осей чувствительности, и, для некоторых типов ДУС, коэффициенты динамического дрейфа. В работе используются обозначения, принятые в [1], [3].
В [1] задача определения параметров модели инструментальных погрешностей ставится как задача оптимального оценивания, которая может быть решена методами калмановской фильтрации. Модель инструментальных погрешностей ньютонометров имеет вид:

где fz' – вектор-столбец показаний ньютонометров, fz – вектор истинной удельной силы, действующей на приведенную чувствительную массу ньютонометров, записанный в проекциях на оси приборной системы координат Mz, Δfz0 – столбец смещений нулевых сигналов, Γ – матрица, содержащая погрешности масштабных коэффициентов на диагонали и малые углы перекосов осей чувствительности вне диагонали. Приборная система координат выбрана так, что элементы матрицы Γ над главной диагональю равны нулю. Модель инструментальных погрешностей датчиков угловой скорости (ДУС) имеет вид:


Здесь ωz' – вектор-столбец показаний ДУС, ωz – вектор абсолютной угловой скорости БИНС в проекциях на оси приборной системы координат, νz0 – столбец дрейфов ДУС, Θ – матрица, содержащая малые погрешности масштабных коэффициентов на диагонали и малые углы перекосов осей чувствительности вне диагонали, D – матрица малых коэффициентов динамического дрейфа, возникающего у датчиков некоторых типов ДУС (например, микроэлектромеханических).
Далее решается задача определения модельной матрицы Ly ориентации приборной системы координат относительно опорной по показаниям ДУС. Одновременно вводятся уравнения ошибок с вектором состояния, содержащим параметры инструментальных погрешностей (Δfz0, Γ, νz0, Θ, D) и угловые ошибки определения ориентации приборной системы координат. В обозначениях, принятых в [1], [3], изменение компонент вектора состояния с точностью до членов второго порядка малости описывалось системой линейных дифференциальных уравнений:
![]() (1)
(1)
![]()
Корректирующий вектор формируется как разность вычисленного (модельного) и измеренного вектора удельной силы в проекциях на опорный (географический) трехгранник. В соответствии с принятыми моделями сформированные указанным образом корректирующие измерения линейно связаны с компонентами вектора состояния введённой динамической системы:
![]() (2)
(2)
Задача оценки вектора состояния системы (1) при помощи корректирующего вектора (2) решается известными методами линейного оптимального оценивания.
Для максимально возможной обусловленности решения задачи процедура калибровки включает в себя три цикла, в которых БИНС последовательно устанавливается в трех различных положениях (каждая из приборных осей с точностью до погрешностей установки совмещается с горизонтальной осью вращения стенда) [1],[3].
В приведенных уравнениях предполагалось, что чувствительные массы ньютонометров расположены на оси вращения стенда. А значит, в них не были учтены силы реакции, вызванные вращением стенда. Для небольших угловых скоростей (до 10 ⁰/сек) и малых смещений ньютонометров от оси вращения (до 10 см), погрешности, связанные с указанным допущением, не превышают сотых долей процента от измеряемых и оцениваемых величин. Поэтому для инерциальных систем низкого и среднего класса точности описанная модель является вполне пригодной. Для высокоточных систем модель пригодна, если смещения ньютонометров от оси вращения не превышают сантиметра.
Однако на практике нередки случаи, когда по техническим причинам обеспечить расположение чувствительных масс ньютонометров вблизи оси вращения не представляется возможным. При этом свойства предложенного в [1] способа калибровки таковы, что увеличение диапазона изменения угловой скорости вращения в процессе калибровки приводит к увеличению точности оценки ошибок масштабных коэффициентов ДУС, а значит и остальных параметров инструментальных погрешностей. Однако в то же время из-за отсутствия учёта разнесения чувствительных масс ньютонометров при достаточно больших угловых скоростях вращения стенда и значительных смещениях БИНС от оси вращения использованная модель не является корректной. Так, например, при угловой скорости вращения 180 ⁰/сек (полный оборот за две секунды) и смещении БИНС от оси вращения на 30 см погрешности модели составляют до 30% от измеряемых и оцениваемых величин, что неприемлемо для калибровки систем любых классов точности.
2. Калибровка с учётом смещения инерциального измерительного блока относительно оси вращения стенда и разнесения чувствительных масс ньютонометров внутри БИНС.
Учёт указанных смещений осуществляется изменением исходной модели. Кроме силы реакции опоры f N, учтенной в исходной модели и противодействующей силе тяжести, на чувствительные массы ньютонометров действуют силы инерции, порождающие еще две компоненты реакции связи. Обе компоненты реакции связи известным образом выражаются через радиус-векторы чувствительных масс ньютонометров, вектор угловой скорости системы и его производную. А значит, они могут быть учтены в модели измерений (2). Приведём для первого цикла вращения упрощенную (в предположении равенства нулю второй и третьей компоненты вектора угловой скорости в приборных осях) модель корректирующего вектора с учетом смещений второго и третьего ньютонометров от оси вращения s2, s3:
![]()
Параметры s2, s3 считаются неизвестными константами и включаются в вектор оцениваемых параметров. Уравнения (1) при этом дополняются очевидными формирующими уравнениями.
Анализ скорректированной модели измерений показывает, что параметры s2, s3 отнесения чувствительных масс от оси вращения стенда тем лучше оцениваются, чем больше диапазон изменения угловой скорости вращения стенда (то же можно сказать об элементах матриц Θ и Γ). Методика проведения калибровочного эксперимента при этом остаётся прежней.
3. Результаты применения.
Разработанный подход был использован для калибровки бортовой авиационной курсовертикали на базе микроэлектромеханических инерциальных датчиков. Ниже приводятся результаты обработки данных одного эксперимента, в котором угловая скорость вращения в каждом цикле изменялась в пределах от –200 до +200 ⁰/сек в соответствии с приведенным на рис. 1 профилем. Приведённый профиль угловой скорости стенда не является критичным для методики и может быть изменён в широких пределах. Для сравнения результатов калибровки смещения геометрического центра системы относительно оси вращения стенда вдоль приборных осей были предварительно измерены и составляли приблизительно 29.5±0.5, 1.1±0.5 и 2.5±0.5 см, в разных циклах вращения.
Вначале данные калибровочных экспериментов были обработаны в соответствии с вариантом, предусматривающим учет известных смещений блока БИНС относительно оси вращения. После этого по тем же данным были вычислены оценки как для калибруемых параметров инструментальных погрешностей датчиков Δfz0, Γ, νz0, Θ, D, так и для смещений s2, s3. Графики изменения оценок смещений для трех циклов вращения, а также ковариаций их ошибок σs, т. е. прогнозируемых оценок для среднеквадратического отклонения (СКО) от истинных значений, приведены на рис. 2.
Для примера в табл. 1 приводятся характеристики одного из ньютонометров, полученные по результатам калибровки в двух вариантах. В данном случае оценка инструментальных погрешностей во втором варианте улучшена на порядок.
Таблица 1.
Результаты калибровки для одного из ньютонометров
№ п/п | Параметр | Вариант калибровки | |||
Учет известных смещений | Оценка и учет смещений | Прим. | |||
1 | Показания ньютонометра | о. ч.* направлена вверх | +9.8458** | +9.8112** | м/с2 |
2 | о. ч.* направлена вниз | –9.8023** | –9.8218** | м/с2 | |
3 | Ошибки оценки | ошибки масштабного коэффициента Γii | 0.1 | 0.015 | % |
4 | смещения нулевого сигнала Δfzi0 | 2.2·10-3 | 5.3·10-4 | доли g | |
5 | СКО высокочастотной составляющей сигнала | 8·10-3 | доли g |
* о. ч. – ось чувствительности, ** – показания датчика скомпенсированы с учетом полученных оценок для параметров инструментальных погрешностей
4. Выводы.
Приведённые результаты позволяют сделать вывод о том, что при использовании новой модели измерений отнесение БИНС от оси вращения стенда не приводит к потере точности калибровки. Это упрощает подготовку и проведение эксперимента и позволяет, например, проводить калибровку нескольких систем одновременно на одном стенде.
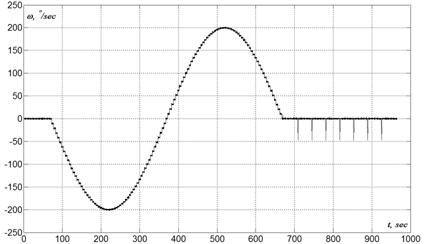
Рис. 1. Профиль изменения угловой скорости вращения стенда
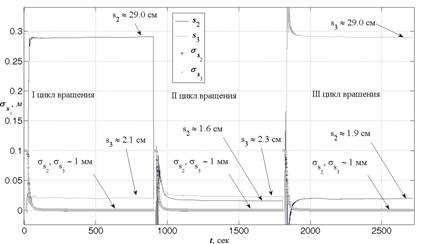
Рис. 2. Графики оценок смещений s2, s3 и ковариаций их ошибок
Литература
1. , , . Калибровка бескарданных инерциальных навигационных систем при помощи грубых одностепенных стендов // Современные проблемы математики и механики, Том I. – М.: МГУ, 2009. – С. 212-222
2. , , . О погрешностях БИНС, обусловленных несинхронностью трактов измерения угловых скоростей и линейных ускорений и геометрией блока акселерометров // Труды Московского института электромеханики и автоматики, Выпуск 3. – М.: ОАО "МИЭА", 2011. – С. 86-95
3. , . Математические основы навигационных систем. Часть II. Приложения методов оптимального оценивания к задачам навигации. – М.: МГУ, 2008. – 151 с.
[1] Кандидат физ.-мат. наук, с. н.с.
[2] Аспирант
[3] Кандидат физ.-мат. наук, в. н.с.
[4] Доктор физ.-мат. наук, профессор
