


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
На правах рукописи
ПОСТНИКОВ Виктор Геннадьевич
ОПТИМИЗАЦИЯ ПОЗИЦИОННЫХ ЭЛЕКТРОПРИВОДОВ АВТОМАТИЗИРОВАННЫХ СИСТЕМ НА ОСНОВЕ ФАЗЗИ-КОНТРОЛЛЕРА
Специальность 05.09.03 – Электротехнические комплексы и системы
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Москва - 2007
Работа выполнена на кафедре «Автоматизированный электропривод» Московского энергетического института (технического университета).
Научный руководитель: доктор технических наук, профессор
Официальные оппоненты: доктор технических наук
кандидат технических наук
Ведущая организация:
Защита состоится «11» мая 2007 года в 14 час. 00 мин. в аудитории M-611 на заседании диссертационного совета Д 212.157.02 при Московском энергетическом институте (техническом университете).
Адрес:
Отзыв на автореферат (в двух экземплярах, заверенных печатью) просим присылать , Ученый совет МЭИ (ТУ).
С диссертацией можно ознакомиться в библиотеке МЭИ (ТУ).
Автореферат разослан «___» ___________ 2007 г.
Ученый секретарь
диссертационного совета Д 212.157.02
кандидат технических наук,
доцент:
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. В современных технологиях находят всё большее применение интеллектуальные системы управления, среди которых имеют место и системы фаззи-управления (СФУ) верхнего технологического уровня. Достоинство СФУ –возможность для сложных и трудно математически описываемых объектов управления сформулировать на логической основе необходимые алгоритмы управления при многих входных переменных. Это позволяет повысить качество автоматизированного технологического процесса многих производственных систем. К данным системам можно отнести различные тепловые системы химического и фармацевтического производства, пищевой промышленности, системы газо - и теплоснабжения. В указанных системах общий регулятор технологического процесса с использованием фаззи-управления формирует задание на необходимые перемещения рабочих органов типа регулируемых механических вентилей, осуществляющих дозированную подачу газа, пара, воды и других жидкостей в соответствующих технологических установках. Данные рабочие органы приводятся в движение электроприводами, работающими в режимах позиционирования и являющимися по существу непосредственными регуляторами технологического процесса.
Кроме отмеченного типа рабочих органов, в автоматизированных технологических процессах могут использоваться и некоторые подъёмно-транспортные и робототехнические установки, в которых требуемые перемещения должны выполняться соответствующими позиционными электроприводами (ПЭП) в автоматическом режиме.
От того, насколько качественно данные позиционные электроприводы осуществляют заданные технологическим регулятором перемещения рабочих органов, зависит и качество управляемого технологического процесса. Задачу – получить наибольшее быстродействие при отсутствии перерегулирования и в пределах требуемой точности позиционирования, можно считать актуальной задачей оптимизации рассматриваемой группы позиционных электроприводов по технологическому признаку.
В настоящее время имеется множество работ в основном зарубежных авторов по системам фаззи-управления верхнего (технологического) уровня в бытовой технике, в ряде различных технических установoк. Имеются работы и по фаззи-управлению нижнего уровня применительно к электроприводам. Наиболее близкими к теме данной диссертации являются работы по применению фаззи-управления в следящем электроприводе для некоторых установок. Но в этих работах фаззи-регулятор (ФР) является только дополнительным корректирующим средством для вспомогательных режимов, а главная задача управления режимом слежения возлагается на традиционные регуляторы.
Коль скоро для верхнего уровня управления рассматриваемых технологических установок используется фаззи-контроллер, то оказывается практически целесообразным с целью получения единообразной элементной базы управления возложить на этот контроллер и задачу оптимизации на нижнем уровне управления для позиционных электроприводов.
Цель диссертационной работы- разработать на основе многоканального фаззи-контроллера оптимизацию позиционных электроприводов в автоматизированных технологических процессах.
Для достижения данной цели решались следующие задачи:
1) анализ особенностей выделенной группы позиционных электроприводов (ПЭП) и составление их расчетных моделей;
2) разработка метода построения алгоритма фаззи-регулятора положения для рассматриваемых ПЭП;
3) оптимизация режима позиционирования электропривода механизма вентиля трубопровода на основе фаззи-контроллера;
4) оптимизация режима позиционирования электропривода механизма транспортного типа с изменяемыми параметрами подвижной части;
5) реализация оптимизированных регуляторов положения на основе фаззи-контроллера.
Методика исследований. Теоретические исследования проводились с использованием методов теории автоматического управления, а также принципов фаззи-управления применительно к исследуемому объекту. Результаты теоретического исследования проверялись компьютерным моделированием на основе программного пакета Matlab – Simulink, а также экспериментально на действующем фаззи-контроллере.
Научная новизна выполненных разработок заключается:
1) в предложенной методике синтеза фаззи-регуляторов положения оптимизирующих позиционные электропривода выделенного класса.
2) в полученном для прямого одноканального фаззи-управления положением алгоритме, минимизирующем ошибку позиционирования при отсутствии перерегулирования и высоком быстродействии для электроприводов механизмов с повышенным моментом сопротивления.
3) в алгоритмах фаззи-регуляторов, оптимизирующих по точности и демпфированию процесс позиционирования электроприводов с маятниковой подвеской рабочего органа.
4) в доработке программы выполнения процедуры дефаззификации в фаззи-контроллере.
Практическая ценность.
Разработанные алгоритмы фаззи-регуляторов повышают качество процесса позиционирования по сравнению с традиционными регуляторами, что способствует также улучшению качества технологического процесса, который обеспечивается данными электроприводами.
Реализация разработанных алгоритмов совместно с заданным технологическим алгоритмом на одном фаззи-контроллере вносит единообразие и упрощение в элементную базу управления, а также упростит и модернизацию системы управления.
Разработанные варианты программной реализации в контроллере процедуры дефаззификации позволяют адекватно сопоставлять отработку алгоритмов на реальном контроллере и моделирование в оболочке Matlab.
Публикации. По теме диссертационной работы опубликовано четыре печатных работы.
Структура и объем работы. Диссертационная работа состоит из введения, четырех глав, двух приложений, заключения и списка литературы. Работа изложена на 112 страницах основного текста, содержит 107 иллюстраций и 6 таблиц. Список литературы включает 24 наименования.
СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность темы исследования, сформулированы цели и задачи диссертации.
В первой главе рассматриваются общие особенности выделенных и исследуемых групп позиционных электроприводов и определяются основные параметры их оптимизации.
Во второй главе рассматриваются позиционные электроприводы небольшой мощности со значительным реактивным моментом сопротивления и повышенным моментом трогания (электропривод механических вентилей в некоторых системах газо-водо-теплоснабжения, для которых желателен плавный без перерегулирования процесс позиционирования с достаточно высоким быстродействием и точностью остановки).
Традиционные линейные регуляторы типа П, ПД, ПИ не полностью отвечают условиям оптимизации позиционных электроприводов данного типа. Ошибка позиционирования при отсутствии перерегулирования - значительна, она составляет ≈ 25% заданного перемещения.
Уменьшить ошибку позиционирования, не ухудшая качества переходного процесса, можно, использовав фаззи-управление, которое позволяет сформи-ровать требуемый алгоритм для уменьшения ошибки.
Известный общий подход к синтезу алгоритма фаззи-управления конкретизирован в работе в виде методики синтеза ФР для выделенного класса позиционных электроприводов. В состав методики входит совокупность рекомендаций по составлению таблицы правил и определению параметров функций принадлежности для всех входных и выходных переменных. Процедура синтеза выполняется по этапам, шаг за шагом, как это показано на структурной схеме построения алгоритма (рис.1). Конечной формой алгоритма ФР является зависимость физического выходного управляющего воздействия от физических входных переменных.
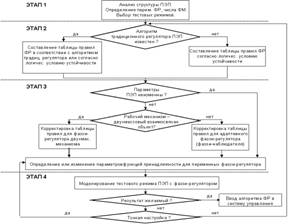
Рис.1
Структурная схема ПЭП первого типа с фаззи-управлением показана на рис.2
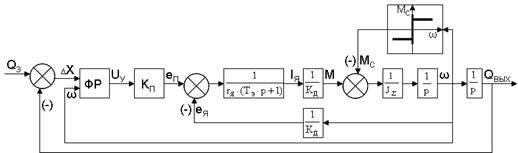
Рис.2
В качестве входных переменных ФР используются сигналы рассогласования и скорости вращения двигателя. Стратегия управления фаззи-регулятора закладывается в таблице правил. Предварительно необходимо определить число фаззи-множеств, описывающих каждую переменную ФР. На практике оказывается достаточным: 5-ти ФМ для входных переменных и 7-ми ФМ для выходной переменной. Соответствующие им функции принадлежности приведены на рис.3


Рис.3
При заполнении таблицы правил воспользуемся уже синтезированным традиционным регулятором положения. Выбираем ту область таблицы правил, в которой одна из входных переменных равна нулю (задействовано только ,,нулевое” фаззи-множество) и симметрично расставляем названия фаззи-множеств выходной переменной. Первыми заполняются центральные строка и столбец таблицы правил (рис.4). Далее заполняются оставшиеся клетки таблицы, как суммарное воздействие соседних (с этой клеткой) фаззи-множеств (например сумма PS+PS=PM).
Рис.4 Рис.5
Оптимальные коэффициенты C1,С2,…,Сn для каждой переменной определяются иттерационным методом (методом проб и проверок) в процессе моделирования.
Возникновение ошибки позиционирования связано с наличием в системе момента сопротивления Мс. При подходе РО к остановке, когда рассогласование (DХ=DQ) еще велико, скорость становится уже мала, и РО останавливается, не доходя до заданного уровня остановки (в соответствии с той таблицой правил, которая составлена).
Для дополнительного снижения ошибки можно использовать дополнительный ФР. Теперь получаем систему с двумя ФР, при этом второй ФР будет работать только в зоне остановки с дополнительным правилом:
при подходе к установившемуся значению перемещения, когда рассогласование еще ,,велико”, а скорость уже,,мала”, дать дополнительное управляющее воздействие. Вне зоны,,велико” и при скоростях достаточно,,больших”, дополнительное управляющее воздействие не требуется. Выходы с обоих фаззи-регуляторов подаются на блок максимизации, на выходе которого выделяется управляющий сигнал.
В работе было предложено объединение на уровне алгоритмов двух ФР в один путем учета всех задействованных выходных фаззи-множеств, с последующей корректировкой центров функций принадлежности. Составленная таблица объединенного ФР приведена на рис.5.
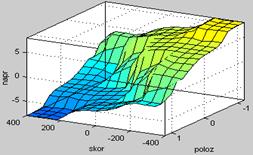
Нелинейный алгоритм управления объединенного фаззи-регулятора в графической форме как функция двух переменных представлен на рис.6.
QЗ, QВЫХ, рад
![]()
 t, c
t, c
Рис.6 Рис.7
Полученные параметры функций принадлежности (см. рис.6) фаззи-регулятора положения:
для X1=DQ: С5=-С1=1,2рад; С5*=С1*=0,83; С4=-С2=0,7рад; С4*=С2*=0,58; С3=0рад;
для X2=w: С5=-С1=400 1/c; С5*=С1*=0,95; С4=-С2=200 1/c; С4*=С2*=0,5; С3=0 1/c;
для Uу: С7=С1=9В; С7*=С1*=1; С6=С2=6В; С6*=С2*=0,66; С5=С3=0,3В; С5*=С3*=0,03; C4=0В;
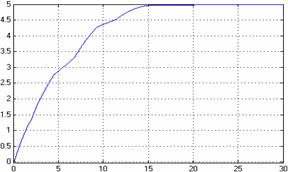
Результат моделирования (рис.7) показал, что ошибка позиционирования может быть сведена практически к нулю за счет нелинейного алгоритма управления, сформированного (объединенного) ФР при сохранении высокого быстродействия и отсутствия перерегулирования.
В третьей главе рассматриваются позиционные электроприводы некоторых подъемно-транспортных механизмов, роботов и манипуляторов, работающих в автоматических режимах. Позиционирование рабочего органа в таких электроприводах выполняет либо чисто транспортные функции (например, перемещение подвешенного груза), либо по окончанию позиционирования выполняется некоторая технологическая операция (например, сверление или сварка). Особенность данной группы ПЭП - изменение момента нагрузки и момента инерции при переходе от одного позиционирования к другому, а в некоторых механизмах и в процессе одного позиционирования.
Для ПЭП механизма с маятниковой подвеской рабочего органа решалась комплексная задача обеспечения точного позиционирования механизма в заданное технологией положение в сочетании с демпфированием колебаний раскачивающегося груза при условии произвольной формы и величины заданного перемещения. На практике данная задача решается в режиме ручного управления опытным оператором (крановщиком) на основе приобретенного им опыта работы.
Для проведения исследований динамических режимов с большими углами отклонения РО была составлена расчетная модель ЭП данного механизма, представляющего собой сложную нелинейную систему.
Структурная схема ПЭП с демпфирующими регуляторами показана на рис.8.
Рис.8
Логический закон устойчивости, по которому синтезируется демпфирующий фаззи-регулятор:
1) Если знаки угла отклонения маятника и скорости отклонения угла маятника одинаковы, то маятник удаляется от положения равновесия, и требуется дать управляющее воздействие того же знака (т. е. переместить механизм в направлении отклонения маятника).
2) Если знаки угла отклонения маятника и скорости отклонения угла маятника противоположны, то требуется дать нулевое или небольшое управляющее воздействие, уменьшающее отклонение.
3) Если угол отклонения маятника равен нулю и скорость отклонения угла маятника равна нулю, то маятник находится в положении равновесия, и управляющего воздействия не требуется.
При исследовании процесса демпфирования механической части входное воздействие Fу прикладывается к опорной тележке (рис.8, ключ K1 разомкнут).
Таблица правил, соответствующая данному закону, имеет вид (рис.9):
Рис.9
Центры (Ci) функций принадлежности переменных угла (φ), угловой скорости (ω), усилия на опору (FУ) расставляются изначально линейно с последующей коррекцией в процессе моделирования. Полученные параметры функций принадлежности демпфирующего фаззи-регулятора:
для j: С5=-С1=2,6рад.; С5*=С1*=1; С4=-С2=1,3рад.; С4*=С2*=0,5; С3=0рад.;
для w: С5=-С1=6 1/с; С5*=С1*=1; С4=-С2=3 1/с; С4*=С2*=0,5; С3=0 1/c;
для Fу: С7=-С1=5500Н; С7*=С1*=1; С6=-С2=5005Н; С6*=С2*=0,89; С5=-С3=18Н; С5*=С3*=0,004; C4=0Н.
При моделировании механической части электропривода маятникового механизма (рис.8, ключ K1 разомкнут) с синтезированными демпфирующими средствами будем предполагать, что технологическая задача состоит из двух этапов:
1) движение механизма в заданное положение при отключенном демпфирующем регуляторе (рис.10 или рис.11, от t=0с. до t=4c.);
2) механизм входит в зону остановки, и демпфирующий (рис.8, ключ K4 или K3 замыкается) регулятор включается (рис.10 или рис.11, от t=4с.);
Результат моделирования (зависимость угла отклонения маятника от времени) с демпфирующим ПД-регулятором представлен на рис.10, а с демпфирующим ФР - на рис.11.
j, рад. j, рад.
 t, с
t, с 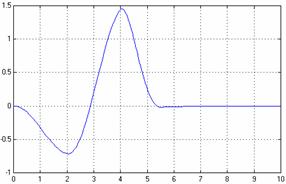 t, с
t, с
Рис.10 Рис.11
Результаты моделирования показали, что демпфирование колебаний в системе с фаззи-регулятором происходит не хуже, чем в системе с традиционным ПД-регулятором и с несколько большим быстродействием.
Выполненная задача устранения раскачивания груза еще не решает задачи позиционирования механизма с требуемой точностью, т. к. отсутствует обратная связь по положению. Для решения данной задачи исследовалась схема ПЭП с замкнутым ключом K1 (рис.8).
Проще всего для данного класса электроприводов применить комбинированное управление. Таким образом, используя уже синтезированный демпфирующий ФР и подобрав необходимые параметры традиционных регуляторов всех контуров, получаем расчетную модель ПЭП данного механизма (рис.8, ключ K3 замкнут). Однако, для использования алгоритма уже синтезированного демпфирующего ФР, необходимо весь технологический процесс разбить на этапы:
1) движение механизма с максимальной скоростью в заданное положение при отключенном демпфирующем регуляторе (рис.8, ключ K3 разомкнут) – процесс позиционирования (рис.12а, b, от t=0с. до t=5,2c.);
2) механизм входит в зону остановки, и демпфирующий регулятор включается (рис.8, ключ K3 замыкается) – процесс демпфирования колебаний (рис.12a, b, от t=5,2с. до t=6c.).
3) фиксация механизма в заданном положении (рис.12a, b, от t=6с).
Сигнал с регулятора положения будет являться сигналом включения каждого этапа.
Это позволяет обеспечить равенство начальных условий при синтезе алгоритма демпфирующего ФР, выполняемого для механической части ЭП данного механизма и при использовании этого ФР в полной модели ПЭП механизма с маятниковой подвеской рабочего органа. Проведено тестирование полученной системы электропривода при отработке скачка задающего сигнала на большую величину (15м), когда РО подходит к зоне остановки с максимальной скоростью. При этом скачке задающего воздействия параметры электропривода могут входить в зону насыщения. Результаты тестирования представлены на рис.12 (a – перемещение механизма; b – угол отклонения маятника)
S, м φ, рад.
 t, c
t, c 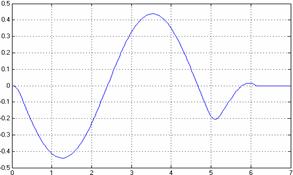 t, c
t, c
(a) (b)
Рис.12
Данное позиционирование обеспечивает эффективное демпфирование колебаний рабочего органа и приемлемую точность остановки, но требуется ряд коммутаций в цепях управления и в силовой цепи.
Решалась также задача одновременного выполнения, как точного позиционирования механизма, так и демпфирования колебаний раскачивающегося груза.
Коль скоро для исследуемых ПЭП планируется использовать для верхнего и нижнего уровня управления фаззи-контроллер, то экономически целесообразно применить комбинацию: фаззи-регулятор в прямом канале управления и демпфирующий ФР в цепи обратной связи (рис.8, ключи K1,K2,K3 замкнуты). Тогда, на одном фаззи-контроллере удается реализовать три функции управления: формирование технологического задания на перемещение и обеспечение точной отработки механизмом заданного перемещения в сочетании с одновременным демпфированием колебаний маятниковой подвесы. Однако, данная задача оказывается весьма сложной для системы автоматического управления, так как алгоритм устранения колебаний маятника может входить в противоречие с алгоритмом точной остановки.
На рис. 13 (a – перемещение механизма; b – угол отклонения маятника) представлены результаты тестирования ПЭП с маятниковой подвеской РО с синтезированными алгоритмами фаззи-регуляторов в прямой и обратной цепи.
S, м φ, рад.
 t, c
t, c 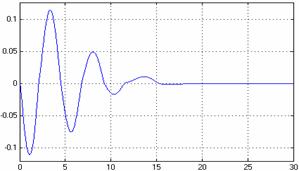 t, c
t, c
(a) (b)
Рис.13
Лучший результат по демпфированию получается в том случае, если подавать демпфирующее воздействие на вход контура скорости, а не на вход контура тока или силы. При этом в работе детально исследовалась комбинированная система управления: фаззи-регулятор в прямом канале управления и традиционный демпфирующий регулятор в цепи обратной связи (рис.8, ключи K1,K2,K5 замкнуты).
На рис. 14 (a – перемещение механизма; b – угол отклонения маятника) представлены результаты тестирования ПЭП с маятниковой подвеской РО с фаззи-регулятором положения (рис.8, ключи K1,K2,K5 замкнуты) и с традиционным П-регулятором положения (рис.8, ключи K1,K5 замкнуты).
S, м φ, рад.
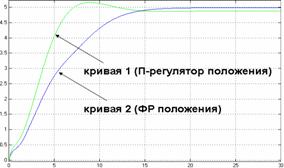 t, c
t, c 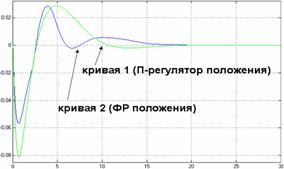 t, c
t, c
(a) (b)
Рис.14
Таким образом, можно сделать вывод: эффективным средством точного позиционирования при одновременном демпфировании колебаний в сложной двухмассовой системе является применение в цепи управления перемещением тележки фаззи-регулятора, который позволяет устранить ошибку позиционирования, в сочетании с демпфирующим традиционным или фаззи-регулятором в цепи обратной связи. Замена ПД-регулятора на фаззи-регулятор придаст системе управления меньшую чувствительность к изменению параметров электропривода.
Решалась также задача оптимизации ЭП, но с изменяемыми параметрами в процессе позиционирования РО. При изменении длины плеча робота в процессе выполнения технологической задачи изменяется и момент инерции. Обеспечить оптимальное позиционирование в данных условиях на базе типовых регуляторов без адаптивного управления - затруднительно. Решить данную задачу на основе аналитического адаптивного управления сложно как в синтезе, так и в реализации данной системы управления. В работе была осуществлена попытка заменить аналитический, адаптивный наблюдатель на фаззи-наблюдатель.
Cтруктурная схема ПЭП с фаззи-наблюдателем имеет вид, показанный на рис.15.
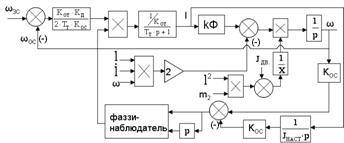
Рис.15
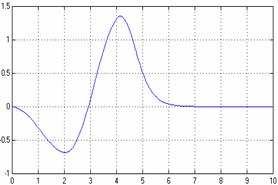
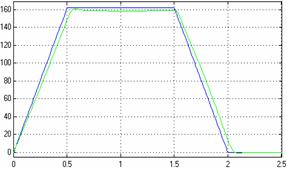
На рис.16а, b показаны результаты позиционирования робота-манипулятора с адаптивным (а) и фаззи-наблюдателем (b).
ω, 1/c ω, 1/c
 t, с
t, с 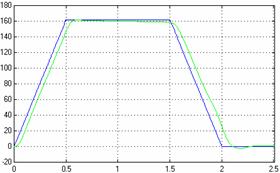 t, с
t, с
(a) (b)
Рис.16
Как видно, позиционирование с фаззи-наблюдателем протекает не хуже, чем с традиционным адаптивным наблюдателем.
В четвертой главе решался вопрос практической реализации фаззи-управления для рассматриваемого класса электроприводов.
На современной стадии развития техники существует несколько возможных cпособов реализации фаззи-управления:
1) использование готового фаззи-контроллера;
2) на универсальном контроллере, путем написания программы реализации алгоритмов фаззи-управления на языке высокого уровня или внутреннем языке программирования контроллера.
Одним из важных достоинств современных контроллеров является многоканальность, т. е. наличие многих входов и выходов, а следовательно, появляется возможность совмещения верхнего и нижнего уровня фаззи-управления на одной материальной базе (на одном контроллере), что в свою очередь приводит к экономии финансовых средств, затрачиваемых на реализацию данной системы управления, а также к упрощению эксплуатации и перенастройки системы управления при изменении управляемого технологического процесса.
На рис.17 представлена функциональная схема фаззи-управления технологическим процессом на фаззи-контроллере (ФК), объединяющем фаззи-регуляторы верхнего (ФР1) и нижнего (ФР2) уровня управления.
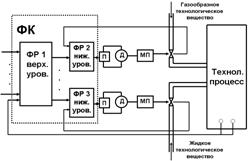

Рис.17 Рис.18
Обмен данными между верхним и нижним уровнем фаззи-управления осуществляется внутри фаззи-контроллера через адресные ячейки памяти.
Для реализации полученных алгоритмов оптимизации позиционных электроприводов разработаны программы как на языке C++, так и под реальный контроллер типа Quantum (программная оболочка Concept). Корректность работы написанных программ была подтверждена тестированием их как в специальных тестовых программных оболочках, так и на практике в учебно-диагностическом центре разработчика контроллера Quantum. Внешний вид контроллера представлен на рис.18
Контроллер Quantum имеет модульную конструкцию:
Модуль центрального процессорного устройства (ЦПУ) – сердце контроллера, осуществляет хранение информации, обработку операций, передачу данных в соответствии с загруженной в него программой.
Модуль аналогового или цифрового ввода – осуществляет прием значений входных сигналов контроллера.
Модуль аналогового или цифрового вывода – осуществляет вывод значений управляющего воздействия (выходного сигнала), рассчитанных в ЦПУ.
Модуль питания– дополнительный внешний источник питания.
Слот соединения блоков (соединительная карта) – предназначен для соединения блоков и обеспечения взаимосвязи между ними.
Выбор данного контроллера объясняется:
- достаточной простотой программирования алгоритмов фаззи-регулятора и согласованностью с современным способом моделирования систем с фаззи-управлением;
- выходной многоканальностью, позволяющей выполнять разные уровни управления;
- наличием ряда внутренних языков программирования, которые просты и удобны в изучении и использовании.
Для написания программы фаззи-управления для позиционных электроприводов воспользуемся внутренним блочным языком программирования в среде Concept (язык контроллера Quantum).
Функциональная схема фаззи-контроллера представлена на рис.19.
Рис.19
На рис.19 приняты следующие обозначения:
mM(X1), mN(X1) – значения функций принадлежности задействованных фаззи-множеств переменной X1;
mP(X2), mR(X2) – значения функций принадлежности задействованных фаззи-множеств переменной X2;
m1, m2, m3, m4 – значения функций принадлежности задействованных фаззи-множеств выходной переменной;
mZ, mPS, mPM – результирующие значения функций принадлежности задействованных фаззи-множеств выходной переменной.
Фаззи-контроллеры имеют блок ввода. Этот блок позволяет принимать и записывать в буфер памяти текущие значения входных физических фаззи-переменных.
На этапе фаззификации осуществляется расчет (по заложенным формулам) значений функций принадлежности этих переменных: mM(X1), mN(X1), mP(X2), mR(X2).
На этапе логического заключения для четырех пар входных функций принадлежности mMmP, mMmR, mNmP, mNmR определяются их минимальные значения (блоками “И1”-“И4”) m1, m2, m3, m4, которые присваиваются функциям принадлежности фаззи-множеств выходной переменной, соответствующим клеткам таблицы правил. Если задействовано не одно, а несколько одноименных фаззи-множеств, то выбирается одно фаззи-множество с наибольшим значением функции принадлежности (блоками “ИЛИ1”-“ИЛИ4”).
Селектор направляет каждое из сформированных значений m1, m2, m3, m4 на соответствующий данному термину блок максимума (“ИЛИ”).
На этапе дефаззификации происходит расчет значения выходной физической переменной из объединенных по принципу максимума выходных фаззи-множеств. Наиболее известными и часто используемыми являются следующие методики – Singleton и Mamdani.
Блок вывода предназначен для вывода сформированного физического управляющего сигнала.
Для реализации этапа фаззификации в среде Concept используется специально предназначенный блок – фаззификации. Логическое заключение формируется на блоках минимума (И) и максимума (ИЛИ).
Фрагмент программы, выполняющий этапы фаззификации и логического заключения, реализации фаззи-регулятора положения ПЭП механизма вентиля, приведен на рис.20.
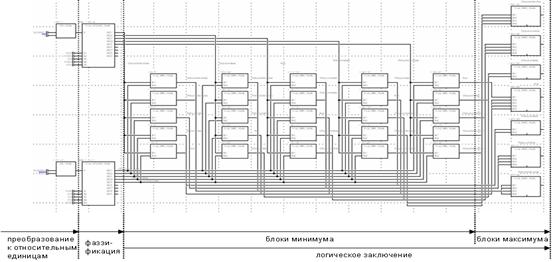
Рис.20
При расчете выходного сигнала по методу Singleton необходимо и достаточно иметь значения центров масс всех фаззи-множеств выходной переменной и значения функций принадлежностей к ним. Блок выполнит вычисления по следующей формуле:

В современных способах моделирования систем с фаззи-управлением широко используется в процедуре дефаззификации метод центра тяжести фигуры объединенного фаззи-множества (формула Mamdani). Для сопоставления результатов отработки алгоритма, полученного моделированием и реализованного контроллером, требуется согласовать расчетные формулы для этапа дефаззификации.
В библиотеке Concept нет специального блока, который позволит рассчитать выходной сигнал по формуле Mamdani (поиск центра масс получившейся фигуры):
Реализовать данную функцию напрямую в среде Concept затруднительно. В работе предлагается упрощенная модификация метода Mamdani, которая может обрабатываться в Concept.
Допущение:
1) Будем полагать, что полученная фигура есть сумма трапеций( пренебрегаем ошибкой вызванной наложением фигур):
![]()
2) Заменим трапецию – треугольником, пренебрегаем ошибкой, вызванной разностью площадей этих фигур.
Таким образом, можно записать упрощенную формулу Mamdani:
![]()
Общий вид упрощенной формулы Mamdani:
На рис.21 представлена реализация упрощенного метода Mamdani в среде Concept.
Рис.21
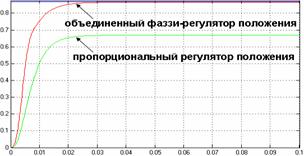
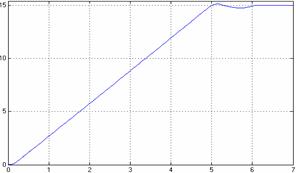
В качестве тестируемого процесса позиционирования выбираем процесс отработки скачка задающего устройства на угол, максимально допустимый по току. Сравниваем результаты позиционирования (рис.22): при моделировании в среде Matlab, при тестировании написанной программы в специальном Quantum-симуляторе и при тестировании реального контроллера Quantum с загруженной в него программой.
Рис.22
Загрузка программы на реальный контроллер происходит с компьютера через специальный шнур (шнур для программирования). При загрузке программы используется Modbus (протокол обмена информации.)
Время полной обработки контроллером Quantum одного цикла вычислений равно 1,3мс. Таким образом, полученный результат полностью подтверждает корректность работы контроллера в соответствии с написанной программой.
Упрощенная формула Mamdani подходит для реализации этапа дефаззификации только в тех случаях, когда значения центров масс функций принадлежности выходного управляющего воздействия невелики. В этом случае погрешность вычисления незначительна, и наложенные допущения обоснованы. В противном случае погрешность вычисления заметно возрастает. На рис.23 приведен результат тестирования программы реализации демпфирующего фаззи-регулятора, считающего по упрощенной формуле Mamdani и по формуле Singleton, для ПЭП механизма с маятниковой подвеской рабочего органа.
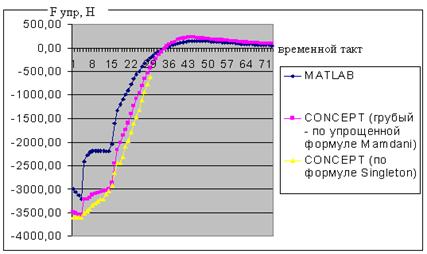
Рис.23
Для снижения погрешности вычисления в работе составлена программа реализации точной формулы Mamdani для этапа дефаззификации.
Для программирования процесса вычисления по точной формуле Mamdani необходимо знать конечную форму функции принадлежности выходной переменной. Таким образом, создаются параллельные ветви вычисления, каждая из которых реализует расчет одной из возможных форм функции принадлежности выходной переменной. Программа выбирает нужную расчетную ветвь автоматически на основе сравнения сформированных значений функций принадлежности выходной переменной к каждому фаззи-множеству.
Результат тестирования программы реализации демпфирующего ФР, рассчитывающей этап дефаззификации по точной формуле Mamdani, приведен на рис.24.
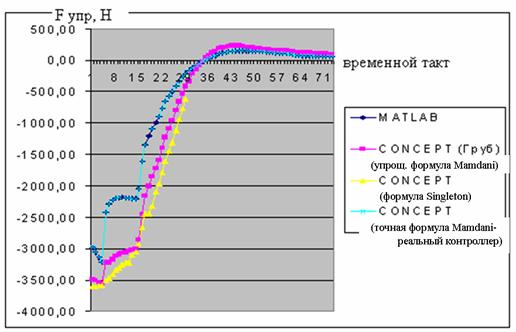
Рис.24
При реализации точной формулы Mamdani ошибка практически равна нулю (расхождения в результатах расчетов, проводимых в написанной программе и в MATLAB, объясняется математическими округлениями), но при этом время выполнения одного цикла (такта) вычисления возрастает до 2,5мс.
В заключении обобщены основные результаты работы.
ЗАКЛЮЧЕНИЕ
Проведенное исследование показало, что прямое фаззи-управление положением с разработанными алгоритмами для электроприводов выделенного класса оказывается эффективным средством оптимизации в направлении повышения качества позиционирования в автоматизированных технологических системах. Получены нижеследующие основные результаты работы.
1. Предложена методика синтеза фаззи-регулятора положения для оптимизации позиционных электроприводов рассматриваемыx типов.
2. Для электроприводов механизма вентиля с повышенными значениями момента сопротивления и момента трогания оптимизированный объединенный фаззи-регулятор положения обеспечивает при плавном без перерегулирования процессе позиционирования и без снижения быстродействия практически нулевую ошибку остановки рабочего органа.
3. Позиционный электропривод механизма с маятниковой подвеской рабочего органа с фаззи-регулятором положения с составленным оптимальным алгоритмом позволяет осуществить заданный режим позиционирования с устранением раскачивания груза, с большими быстродействием и точностью остановки по сравнению с традиционным управлением.
4. Разработанная программа реализации процедуры дефаззификации для контроллера позволяет адекватно сопоставлять отработку алгоритмов на реальном контроллере и моделированием в оболочке Matlab-Simulink.
5. Реализация разработанных алгоритмов совместно с технологическим алгоритмом на одном фаззи-контроллере унифицирует элементную базу системы управления и упростит ее модернизацию.
6. Работоспособность синтезированных фаззи-регуляторов, оптимизирующих процесс позиционирования, проверена их тестированием в реальном времени как с использованием специальных тестовых программных оболочек, так и непосредственно на реальном контроллере Quantum.
Основные положения диссертации опубликованы в следующих работах:
1. Постников алгоритма фаззи-управления для позиционного электропривода. // Тр. МЭИ (ТУ). Вып. 679, - М.: Издательство МЭИ, 2003. – С.91-100.
2. Постников -регулятор электропривода механизма перемещения груза на маятниковой подвесе. // Тр. МЭИ (ТУ). Вып. 680, - М.: Издательство МЭИ, 2004. – С.57-63.
3. Постников алгоритмов систем управления позиционных электроприводов на фаззи-контроллере. // Тр. МЭИ (ТУ). Вып. 681, - М.: Издательство МЭИ, 2005. – С.67-80.
4. Постников позиционных электроприводов в автоматизированной системе на основе многоканального фаззи-контроллера. // ЭЛЕКТРО, 2007, №2. – С.28-30.
Подписано в печать Заказ Тир. Печ. л.
Полиграфический центр МЭИ (ТУ)
Красноказарменная ул., д.13
