

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА АВТОМАТИКИ
 |
Расчетно-графическая работа
по дисциплине «Основы теории управления»
Факультет: АВТФ
Группа: АМ-610 Преподаватель:
Студент: Антонов А. А.
Вариант: 1
Новосибирск 2008
Содержание:
1. Математическая модель объекта управления.. 4
1.1. Математическая модель объекта управления после преобразования Лапласа. 5
2. Вывод передаточной функции системы... 6
3. Синтез устройства управления. 7
Список использованной литературы... 11
Цели работы
· Построение и исследование математической модели системы из двух грузов, подвешенных на пружинах (Рис.1). При построении структурной схемы считать, что сила прикладывается только к 2-ему грузу и координата вычисляется только для него.
· Синтез регулятора для исследуемой системы по ЛАЧХ и исследование системы с регулятором.
Задание
Рис.1 Объект управления - Система из двух грузов на трех пружинах.
Выход – x1
Управление – F1
С помощью силы F1 необходимо уравновесить x1
Основная часть
1. Математическая модель объекта управления
Модель представлена на Рис.1. Силу притяжения Земли не учитываем. Примем, что демпфирование (сопротивление среды) отсутствует.
Пояснения к модели:
m1, m2 – массы 2-х заданных грузов (материальных точек);
k1, k2, k3 – коэффициенты упругости для 3-х заданных пружин;
x1, x2, x3 – координаты соответствующих грузов, проходящих параллельно системы из 2-х грузов и пружин;
F1, F2, F3 – мгновенные управляющие воздействия (силы с направлениями, указанными векторами) на каждую из материальных точек, приводящие систему в движение;
Построение математической модели объекта управления в виде системы дифференциальных уравнений.
Для выяснения поведения системы из 3-х пружин и 2-х мат. точек с массами после приложения внешних сил сначала рассмотрим поведение системы из 1-ой пружины с подвешенной к ней материальной точкой массой m (Рис.2).
Рис.2. Система из пружины и материальной точки с массой m.
После воздействия внешней силы F = m*a (где a = x’’), мат. точка начинает совершать колебательные движения в сопротивляющейся среде под влиянием упругой силы пружины, действующей по закону Гука, который гласит:
Упругая сила действует в сторону положения точки равновесия х и пропорциональна уклонению от положения равновесия, т. е. –k*x.
Запишем уравнение системы по второму закону Ньютона:
![]()
![]() (1)
(1)
Рассмотрим систему из груза(m1) и двух пружинок(k1,k2).При приложении к грузу своей силы F2, добавляется воздействие, которое происходит через пружины, соединяющий груз и вершину модели. Следовательно мы можем записать:
![]() ,
,
Рассмотрим систему из груза(m2) и двух пружинок(k1,k3).При приложении к грузу своей силы F3, добавляется воздействие, которое происходит через пружины, соединяющий груз и вершину модели. Следовательно мы можем записать:
![]() ,
,
При рассмотрении системы из двух грузов и трёх пружинок (см. Рис. 1), при воздействии на каждый груз своей силы, система уравнений выглядит следующим образом
![]()
![]() (2)
(2)
![]() ,
,
Также, мы записываем, уравнение в точке соединении трех пружин, которое не является дифференциальном уравнением:
 , где
, где 
Тогда после подстановки, найдем ![]() :
:
![]()
![]()
![]()
![]()
Математическая модель объекта управления после преобразования Лапласа.
Перейдем от дифференциальных уравнений к линейным при помощи преобразования Лапласа:
![]()
 ,
,
 , (3)
, (3)
![]()
![]() ,
,
 , (4)
, (4)
Выполним преобразования:
![]()
![]()



![]()

 (4’)
(4’)
Пользуясь пакетом МatLab, составим структурную схему исследуемой системы согласно (4):
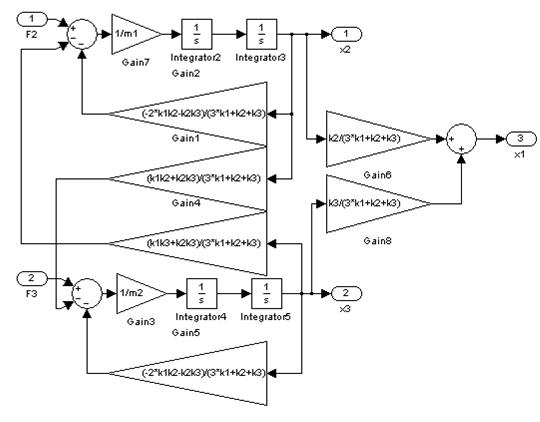
Рис.3. Структурная схема всей нескорректированной системы.
2. Вывод передаточной функции системы
Для дальнейшего решения зададимся значениями коэффициентов упругости для пружин и массами грузов. Для простоты решения примем, что эти переменные имеют единичные значения:
k1 = k2 = k3 = 1
m1 = m2 = 1
Подставив эти значения в (4), получим следующую систему уравнений:![]()
 (5)
(5)
Для х1 имеем:

Согласно заданию мы имеем, в упрощённом представлении, следующую модель исследуемой системы (Рис.3.). Силы F2, F3 равны нулю, и выходом системы служит координата х2.

Рис.4. Упрощённое представление исследуемой системы.
Построим структурную схему объекта управления:
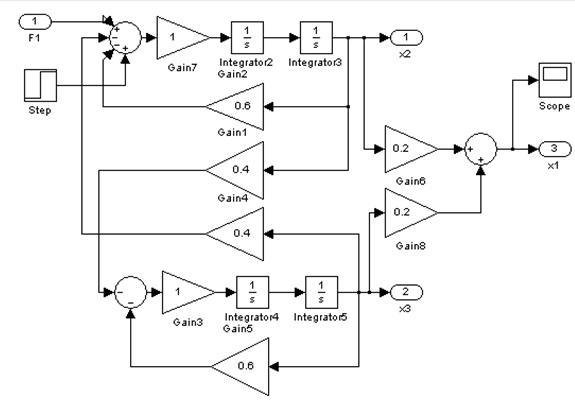
Рис.5. Структурная схема исследуемой нескорректированной системы
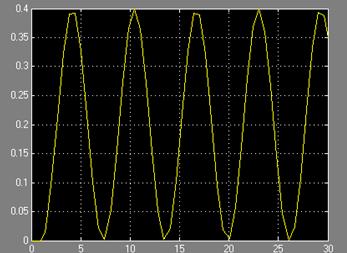
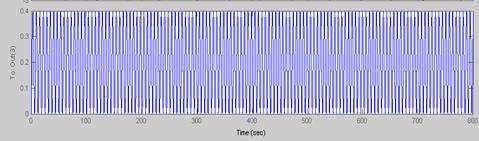
Рис.6. Графики сигналов: вход, ошибка, выход нескорректированной разомкнутой системы.
Мы видим, что система неустойчива. Для корректировки её поведения разработаем УУ методом по ЛАЧХ.
3. Синтез устройства управления.
Найдём передаточную функцию исследуемого объекта:
[A, B,C, D]=linmod('R3');
sys=tf(ss(A, B,C, D))
0.2 s^2 + 2.22e-017 s + 0.04
s^e-017 s^3 + 1.2 s^e-017 s + 0.2
Мы нашли передаточную функцию разомкнутой системы. Построим ЛАЧХ и ФЧХ для неё.
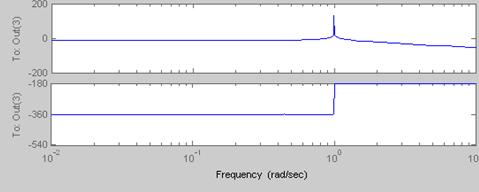 bode diagram
bode diagram
 step responce
step responce
 impulse response Рис.7. Характеристики системы
impulse response Рис.7. Характеристики системы
Корневой портрет системы:
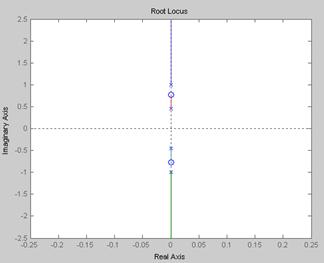
Мы не видим возможности применить метод синтеза УУ по ЛАЧХ.
Применим алгебраический метод синтеза.
Алгебраический метод синтеза.
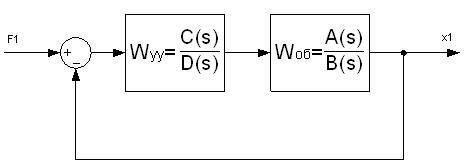
Рис.8. Замкнутая скорректированная система с УУ.
Поскольку мы имеем передаточную функцию системы 2 степени, то разработаем регулятор со степенью на 1 меньше, то есть 1 степени:

Произведём расчет регулятора с помощью корней ХПЗС скорректированной системы.
Найдём ХПЗС скорректированной системы (см. Рис.7):

То есть ХПЗС имеет вид: ![]()
Произведём подстановку в ХПЗС всех чисел и переменных, обозначив дробные коэффициенты в B(s) через а1.
![]()
Раскроем скобки:
Необходимо, чтобы система была устойчива, поэтому корни ХПЗС должны лежать в левой полуплоскости. Приведем многочлен к виду ![]() , у которого все корни равны –1, т. е. лежат в левой полуплоскости. С помощью MathCad было получено выражение:
, у которого все корни равны –1, т. е. лежат в левой полуплоскости. С помощью MathCad было получено выражение:
![]()
Воспользуемся MatLab'ом для нахождения y0,y1,x0,x1,y2,y3,x2,x3:
a1=-0.;
A=[
a
1.2 a
0 1.2 a
0.2 0 1.2 a1 0
0 0 1
04 0
0.04 ];
B=[7 1];
B=B';
X=inv(A)*B
Результаты:
X =
1.0000
7.0000
36.7167
1.6833
-16.9167
24.9167
-8.5833
16.5833
Мы получили следующий регулятор:

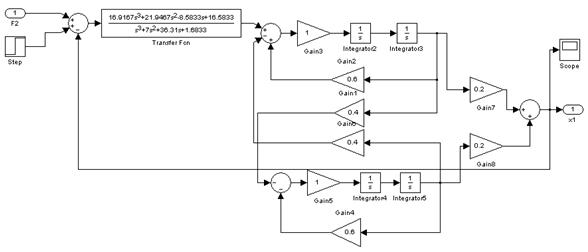
Рис.9. Структурная схема замкнутой скорректированной системы.
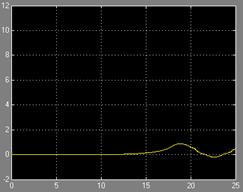
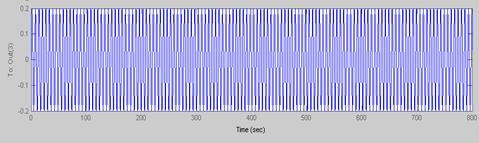
Рис.10. График сигнала на выходе скорректированной замкнутой системы.
Мы видим, что УУ приводит систему к очень близко устойчивому состоянию, это видно из графика сигнала на выходе скорректированной замкнутой системы (Рис.10). Синтез УУ завершён успешно.
Проверка устойчивости системы по критериям Найквиста и Гурвица.
Формулировка критерия Найквиста: для устойчивости замкнутой системы необходимо и достаточно, чтобы амплитудно-фазовая характеристика устойчивой разомкнутой системы при изменении w от 0 до бесконечности не охватывала точку с координатами [-1;j0]

Передаточная функция разомкнутой системы:
Wраз=WpWo

ХПЗС: 
Коэффициенты знаменателей объекта, регулятора, и ХПЗС системы положительны, что удовлетворяет необходимому критерию устойчивости Гурвица.
Проверка достаточного условия:
1*0.33 меньше 7*7.3434
7*7.3434 меньше 37.917*4.4196
37.917*4.4196 меньше 10.083*44.2604
Построим годограф Найквиста:
A=tf([-3.34],[3 44.24 0.3366])
nyquist(A)
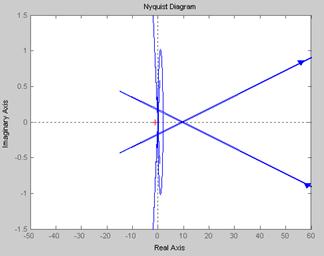
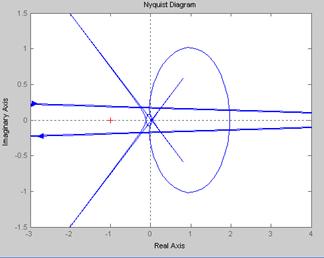
Рис.10. Годограф Найквиста.
График не охватывает точку [-1;j0] , значит замкнутая система устойчива.
ВЫВОД:
В РГР был успешно произведён алгебраический синтез УУ для системы из двух грузов, подвешенных на пружинах (Рис.1). Рассчитали параметры регулятора , приводящего систему к устойчивому состоянию. Для синтеза регулятора использовался пакет MatLab 7.4
Список использованной литературы
1. Лекционный материал по «Основам теории управления» ; 2008г.
2. Теория автоматического регулирования; ,
