

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
На правах рукописи
РАЗРАБОТКА И ИССЛЕДОВАНИЕ МОДЕЛИ НЕЙРОПОДОБНОЙ АДАПТИВНОЙ ОБУЧАЕМОЙ СИСТЕМЫ С ПРИМЕНЕНИЕМ ГЕНЕТИЧЕСКОГО ПОИСКА
Специальность:
05.13.01 Системный анализ, управление и обработка информации
(Вычислительная техника и информатика)
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Таганрог - 2010
Работа выполнена в Технологическом институте Южного федерального университета на кафедре систем автоматического управления
Научный руководитель: доктор технических наук, профессор
Официальные оппоненты: доктор технических наук, профессор
,
доктор технических наук, профессор
Ведущая организация: Ростовский государственный
университет путей сообщений
Защита состоится «10»г. в часов на заседании диссертационного совета Д 212.208.22 при Технологическом институте Южного федерального университета по адресу: пер. Некрасовский, 44, ауд. Д-406 ГСП-17А, г. Таганрог, Ростовская область, 347928.
С диссертацией можно ознакомиться в Зональной научной библиотеке Южного федерального университета по адресу: , г. Ростов-на-Дону, 3444000.
Автореферат разослан «06»г.
Ученый секретарь диссертационного совета Д 212.208.22
доктор технических наук, профессор
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. Востребованность в промышленности технологий управления технологическими процессами и производством при неполном объеме информации (неопределенности), требуемой для решения задач управления, ставят перед техническими и научными организациями задачи создания новых методов и устройств для эффективного управления
Неопределенность характеризуется нестабильностью характеристик сложных объектов и процессов, а также недостаточностью или отсутствием информации о возмущающих воздействиях, обуславливает отсутствие точной модели объекта на всем интервале управления. Проблема эффективного управления системами в условиях параметрической неопределенности является актуальной задачей в различных предметных областях.
Применение теории искусственного интеллекта для решения задач управления в условиях неопределенности, в частности теории нейро-нечетких систем управления с генетической настройкой параметров в условиях неопределенности, представляет собой один из самых современных методов управления. Результат их применения приводит к получению оптимальных решений задачи управления технологичными процессами за приемлемое время, т. к. скорость обучения нейро-нечетких адаптивных обучаемых систем управления в разы превышает скорость изменения параметров объекта управления.
Диссертационная работа посвящена разработке новых методов решения задач управления сложными нелинейными объектами в условиях отсутствия сведений об аналитическом виде модели объекта с применением систем, реализованных в виде интеллектуальных обучаемых устройств. Это определяет и подтверждает актуальность диссертационной работы.
Цель диссертационной работы состоит в развитии методов системного анализа, в частности методов моделирования и синтеза адаптивных обучаемых систем управления стохастическими нелинейными объектами с применением эволюционных методов и методов искусственного интеллекта в условиях отсутствия полной информации об объекте управления.
Объект исследования. Объектом исследования в диссертационной работе являются модели, методы и модули управления в виде адаптивных обучаемых устройств, а также проблемно-ориентированный прикладной программный комплекс для решения задач исследования процессов обучения адаптивных систем управления.
Основные задачи исследования. Для достижения поставленной цели решены следующие основные задачи:
- исследование адаптивных обучаемых систем управления с применением аппарата искусственного интеллекта;
- синтез и исследование модулей управления направлением, скоростью и расстоянием от транспортного средства до препятствия с помощью алгоритмов
обратного распространения ошибки и Хэбба;
- разработка интеллектуальной адаптивной обучаемой системы управления;
- разработка генетического алгоритма обучения модуля управления направлением транспортных средств;
- разработка генетических алгоритмов обучения модулей управления скоростью и состоянием транспортных средств;
- разработка общего генетического алгоритма обучения интеллектуальной адаптивной системы управления;
- разработка специализированного программного комплекса для выбора параметров адаптивных обучаемых гибридных систем управления и проведения экспериментов.
Основные научные результаты:
- метод построения адаптивной обучаемой системы управления, отличающийся возможностью решения задач управления сложными объектами в условиях неполноты данных за счет применения нейро-нечетких структур и алгоритмов обучения интеллектуальной составляющей системы управления;
- Интеллектуальная адаптивная обучаемая система управления, отличающаяся тем, что ее структура состоит из совокупности нечетких модулей принятия управляющих решений, построенных на основе нейронных сетей, функционирующих в соответствии с алгоритмами обучения, позволяющими оптимизировать параметры нечетких модулей;
- метод обучения интеллектуальной адаптивной системы управления, отличающийся, как применением приема декомпозиции в виде алгоритмизации процессов обучения отдельных модулей, так и применением приема композиции, позволяющего алгоритмизировать процесс обучения интеллектуальной гибридной адаптивной системы управления, что способствует уменьшению времени настройки параметров и вывода управляющих воздействий, а также уменьшению ошибки обучения.
Практическая ценность результатов исследований определена их применением в системах автоматического управления транспортными средствами, проектированием интеллектуальных адаптивных обучаемых систем управления, обеспечивающих решение задачи адаптивного управления в соответствии с поставленной целью.
Методы проведения исследования. В диссертационной работе использованы методы теории искусственного интеллекта, теории моделирования, методы функционального анализа, генетические алгоритмы обучения нейро-
нечетких адаптивных обучаемых систем управления. В экспериментальных исследованиях применялось имитационное моделирование на разработанном комплексе «NeuroAndFuzzy» на ЭВМ.
Достоверность полученных в диссертации результатов подтверждается логическими выводами, программными приложениями, актами о внедрении
Реализация и внедрение результатов работы. Результаты работы внедрены:
- на предприятии АВИАОК Интернейшенел.
- на предприятии -Агро»;
- в госбюджетной НИР 12154 «Разработка и исследование методов аналитического синтеза интеллектуальных систем принятия решений и многокритериального управления в условиях неопределенности на основе современных информационных технологий»;
- в учебном процессе на кафедре систем автоматического управления Технологического института Южного федерального университета в г. Таганроге.
Апробация результатов работы. Основные результаты докладывались и обсуждались на научно-технической конференции (AIS’08), ««Интеллектуальные системы, «Интеллектуальные САПР» (CAD-2007); 6-ой Всероссийской научно-практической конференции студентов, аспирантов и молодых ученых «Молодежь XXI века – будущее Российской науки» 2008.; Международной научной конференции «Системы и модели в информационном мире», (СМИ-2009), Таганрог: 2009; Ежегодной научной конференции студентов и аспирантов базовых кафедр ЮНЦ РАН, Ростов н/Д, 2009; Межрегиональной НТК студентов, аспирантов и молодых ученых Южного федерального округа. – Новочеркасск, ЮРГТУ (НПИ), 2009; 6-й всероссийской научно-практической конференции студентов, аспирантов и молодых ученых «Молодежь XXI века – будущее российской науки», Ростов н/Д, 2009; VII-й всероссийской конференции молодых ученых, аспирантов и студентов, «Информационные технологии, системный анализ и управление», Таганрог: ТТИ ЮФУ, 2009; Международной научной конференции «Методы и алгоритмы принятия эффективных решений», (МАПР-2009), Таганрог: ТТИ ЮФУ, 2009; VI Ежегодной научной конференции студентов и аспирантов базовых кафедр Южного научного центра РАН. Изд-во ЮНЦ РАН, 2010; Международной научной конференции «Информационное общество: идеи, технологии, системы», Таганрог: ТТИ ЮФУ, 2010; VII Всероссийской научно-практической конференции студентов, аспирантов и молодых ученых «Молодежь и современные информационные технологии». Томск, 25-27 февраля 2009г; Международный семинар «Системный анализ, управление и обработка информации», пос. Дивноморское СОСК «Радуга»; XI всероссийской научно-технической конференции и школе молодых ученных, аспирантов и студентов «Научные исследования и разработки в области авиационных, космических и транспортных систем», АКТ (2010). Москва, 2010.
Публикации. По теме диссертационной работы опубликована 1 монография, 10 статей и 17 тезисов докладов, из них 4 статьи, в известиях относящихся к перечню ВАК.
Структура и объем работы. Диссертационная работа содержит 179 страниц машинописного текста, включая введение, четыре раздела, заключение, список литературы из 151-го наименования, 72 рисунков, 15 таблиц.
КРАТКОЕ СОДЕРЖАНИЕ ДИССЕРТАЦИИ
Во введении обоснована актуальность темы, сформулированы цель исследования, научная новизна, практическая ценность, основные положения, выносимые на защиту, достоверность и обоснованность научных положений диссертации, апробация работы. Кратко рассмотрено содержание разделов диссертации.
В первом разделе диссертационной работы приведена классификация и описание адаптивных обучаемых систем управления. Дано определение адаптивной системы управления, в частности определение нечетких, нейронных и нейро-нечетких систем управления.
Выполнен аналитический обзор интеллектуальных обучаемых систем управления. Предложены структуры модулей интеллектуальной адаптивной обучаемой системы управления транспортными средствами.
Приведена классификация методов обучения гибридных систем управления, произведен выбор методов настройки с применением генетического алгоритма обучения системы.
Предложена структура системы управления с применением систем нечеткого вывода, состоящей из трех основных модулей, как показано на рис. 1, где ННС1, ННС2 и ННС3 – нейро-нечеткие (модули) управления отдельными параметрами объекта управления (направление, скорость, расстояние).
Рис. 1
Разработана концепция управления транспортными средствами (ТС) в виде трех гибридных модулей управления скоростью, направлением и состоянием ТС в условиях неопределенности. Приведена классификации препятствий на весь радиус видимости системы навигации ТС, показанная на рис. 2.
Во втором разделе синтезирована интеллектуальная гибридная адаптивная обучаемая система управления, состоящая из трех нейро-нечетких модулей с генетической настройкой параметров. Разработана принципиальная схема интеллектуальной адаптивной обучаемой системы управления транспортными средствами, показанная на рис.3.
При работе системы управления на ее вход поступает информация о значениях измеряемых параметров. Из блока датчиков поступает информация на блоки фаззификации ННС1, ННС2 и ННС3, в которых происходит преобразование входной числовой информации в значения степеней принадлежности нечетких
Рис. 2
переменных из терм-множеств лингвистических переменных. В результате полученные значения степеней принадлежности в удобной форме заносятся в блок памяти истории управления ТС.
В базе знаний хранятся правила принятия управляющих решений для каждого модуля. От блока фаззификации передается нечеткая информация в блок оценки состояния объекта управления и в блок принятия решения, в котором выполняется обратная операция фаззификации – преобразование нечеткого принятого решения в управляющее воздействие, этот процесс называется дефаззифиацией. Блоки оценки состояния параметров объекта управления, предназначены для определения ошибки результатов управления.
Для выполнения операции дефаззификации необходима также информация из базы правил и из блока хранения истории управления параметрами ТС.
| Рис. 3 |
В первом модуле после процесса фазификации выполняется процедура нечеткого вывода, которая определяется выражением
![]() , (1)
, (1)
где r=1, …,m – номер элемента в третьем слое, k=1,…,N – номер правила, wkr – веса связей между k-м элементом второго слоя и r-м элементом третьего слоя, τk – уровень активности правил (степень соответствия) в соответствии с зависимостью
![]() . (2)
. (2)
Значение функции нечеткого вывода записывается в виде выражения
![]() . (3)
. (3)
Входной слой нейронной сети (блока дефаззификации) связан с третьим слоем нечеткого модуля. Векторы весов связи i-го нейрона обозначены ‑ ![]() . Результаты нечеткого вывода (3) являются входными параметрами нейронов первого слоя нейронной сети дефаззификации.
. Результаты нечеткого вывода (3) являются входными параметрами нейронов первого слоя нейронной сети дефаззификации.
Количество элементов этого слоя определяется количеством нечетких правил предыдущего слоя. Значения с первого слоя поступают на входы скрытого второго слоя нейронной сети дефаззификации (рис. 4).
Рис. 4
Определение количества нейронов в скрытом слое является очень важной частью реализации общей структуры нейронной сети. Хотя этот слой непосредственно не взаимодействует с внешней средой, он имеет огромное
влияние на конечный результат. Скрытый слой и количество его нейронов должны быть тщательно просчитаны.
Включение слишком малого количества нейронов в скрытом слое приведет к неустойчивой работе сети. Включение слишком большого числа нейронов в скрытом слое может привести к переобучению сети, из-за недостаточности поступающей с первого слоя информации, что приводит к увеличению времени, необходимого для обучения сети в целом. Необычно большое число нейронов в скрытом слое может увеличить время, необходимое для обучения сети. Время обучения может увеличиться до такой степени, что приведет к неадекватному обучению нейронной сети.
При определении количества нейронов скрытого слоя, применялись следующие правила:
- количество скрытых нейронов должно быть не больше числа нейронов входного и не меньше числа нейронов выходного;
- количество скрытых нейронов должно составлять около 2/3 суммы чмсла нейронов входного и выходного слоев;
- количество скрытых нейронов должно быть около половины размера входного слоя.
На основе указанных правил разработанная НС содержит 180 нейронов (рис. 4).
Выходной последний слой модуля разработанной НС содержит один нейрон. Этот слой вырабатывает на выходе управляющие воздействия, представляющие собой дефаззифицированные нечеткие результаты ННС1.
Структуры ННС2 и ННС3 представлены в виде модулей нечеткого управления в виде стандартной нейронной сети. С учетом определяемых параметров нечеткого управления со структурой, определенной в процессе дефаззификации функция принадлежности нечеткого множества Bk описывается выражением, при условии ![]() постоянна:
постоянна:
 . (4)
. (4)
Для разработки модуля выражение (4) преобразуется в более удобную форму
 . (5)
. (5)
В работе предлагается, что модули векторов ![]() и
и ![]() равны единице, поэтому функция (5) принимает вид
равны единице, поэтому функция (5) принимает вид
 . (6)
. (6)
или
![]() , где
, где  . (7)
. (7)
Для вывода операции дефаззификации используется метод центра тяжести, описываемый выражением
. (8)
При подстановке равенство (7) в формулу (8), получаем выражение описывающее операцию дефаззификации:
 . (9)
. (9)
Формулы (4) ‑ (9) описывают функционирование нейро-нечетких модулей ННС1 и ННС2 (см. рис. 1).
В третьем разделе диссертационной работы разработан генетический алгоритм обучения адаптивной системы управления. Блок-схема, описывающая работу системы управления в целом, показанна на рис. 5.
За счет комбинирования нейро-нечеткого выбора и генетических алгоритмов, предложенная в работе система позволяет осуществлять настройку параметров нейронной сети при соблюдении правил нечеткого логического вывода управляющего решения. Применение генетических алгоритмов при обучении ННС позволяет достичь более высоких классификационных показателей по сравнению с обычной необучаемой ННС.
Генетический алгоритм для обучения модулей ННС1, ННС2 и ННС3 приведен на рис.6. Он предназначен для оптимизации параметров адаптивной системы управления с целью формирования управляющих решений с наименьшей ошибкой и временем обучения.
Ошибка системы представляет собой разность между желаемым и полученным решением задачи управления является целевой функцией, которая выбирается из соображения получения оптимального решения при заданных
Рис. 5
весах модулей системы и при наименьшей ошибке обучения. Максимальное значение ошибки системы управления должно быть меньше установленного порога погрешности, составляющего 0,5 % от оптимальных значений (управляемых переменных).
Порог погрешности представляет собой условия останова алгоритма обучения системы управления.
Структура разработанного эволюционного генетического алгоритма обучения интеллектуальной адаптивной системы управления транспортными средствами, показана на рис. 6.
Целевая функция разработанного генетического алгоритма имеет следующий вид
 , (10)
, (10)
Рис. 6
где ![]() - полученные оптимальные значения выходов системы (управляемые переменные); d1,2,3 - желаемые оптимальные значения выходов системы; Fitness – целевая функция (функция приспособленности) каждого модуля системы управления.
- полученные оптимальные значения выходов системы (управляемые переменные); d1,2,3 - желаемые оптимальные значения выходов системы; Fitness – целевая функция (функция приспособленности) каждого модуля системы управления.
Общее значение функции приспособленности системы имеет вид
![]() , (11)
, (11)
Fitness RST[i] – целевая функция (функция приспособленности) системы управления, R – индекс ННС1; S – индекс ННС2; T – индекс ННС3.
Функция останова алгоритма обучения системы управления, имеет следующий вид
 (18)
(18)
Применение данного алгоритма обучения, позволяет уменьшать число шагов настройки параметров системы в целом, не разбивая ее на модули. Такой подход позволяет также сократить время обучения и уменьшить ошибку обучения интеллектуальной адаптивной системы управления.
В четвертом разделе проведено исследование и моделирование интеллектуальной адаптивной обучаемой системы управления с генетической
настройкой на примере управления транспортными средствами.
Вычислена теоретическая оценка среднеквадратической ошибки системы и проведено сравнение с экспериментальной ошибкой системы Total_Fitness.
Исследован процесс обучения. Показано, что предложенные алгоритмы обучения более качественные по сравнению с аналогами. Результаты обучения показаны в табл. 1, где φ, V, L – направление, скорость и расстояние на весь радиус движения транспортного средства.
Таблица 1
Результаты обучения системы управления по десяти примерам
Предлагаемые (Пред) и выходные (Вых) параметры системы | ||||||||
[градус] | V [км/ч] | L [м] | ||||||
Число итера-ций | Пред | Вых | Число итера-ций | Пред | Вых | Число итера-ций | Пред | Вых |
5 | 20 | 19,83 | 20 | 20 | 0 | 7 | 40 | 0 |
4 | 25 | 24,85 | 16 | 25 | 24,90 | 40 | 50 | 49,70 |
3 | 35 | 34,91 | 9 | 25 | 25,16 | 4 | 50 | 50,34 |
13 | 10 | 10,08 | 6 | 40 | 39,93 | 10 | 80 | 79,80 |
5 | 5 | 4,90 | 13 | 45 | 44,70 | 16 | 90 | 90,30 |
10 | 5 | 5 | 8 | 50 | 49,76 | 20 | 100 | 98,60 |
1 | 10 | 10,08 | 7 | 70 | 79,80 | 10 | 140 | 139,58 |
9 | 5 | 5,04 | 6 | 80 | 80,17 | 25 | 160 | 160,34 |
9 | 5 | 0 | 9 | 85 | 84,76 | 8 | 200 | 199,15 |
10 | 5 | 0 | 8 | 80 | 80,13 | 8 | 80 | 79,87 |
Как следует из табл. 1, полученные результаты вполне соответствуют требованиям системы управления по выходным значениям и числу итераций алгоритма обучения. Значение ошибки обучения гораздо ниже установленного порога (функции останова), что показано в табл. 2.
Таблица 2
Значения среднеквадратической ошибки по десяти примерам адаптивной системы управления
При-мер | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
Е1(x) | 0,014 | 0,01 | 0,004 | 0,003 | 0,005 | 0 | 0,003 | 0,001 | 0 | 0 |
Е2(x) | 0 | 0,005 | 0,01 | 0,002 | 0,045 | 0,0280 | 0,020 | 0,014 | 0,028 | 0,008 |
Е3(x) | 0 | 0,09 | 0,05 | 0,020 | 0,045 | 0,080 | 0,088 | 0,057 | 0,361 | 0,008 |
Процесс изменения среднеквадратической ошибки системы управления на один участок траектории движения ТС показан на рис. 7. Для первого модуля ошибка находится в интервале от 0 до 14´10-3, для второго модуля – в интервале от 0 до 45´10-3, и для третьего модуля – в интервале от 0 до 0,3612.
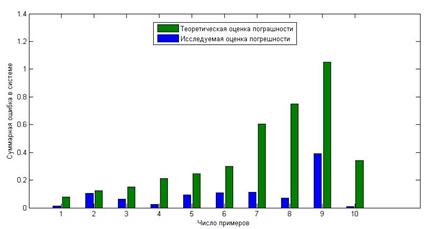
Рис. 7
Из приведенного рисунка следует, что полученные в результате моделирования значения среднеквадратической ошибки в большинстве случаев значительно меньше теоретической оценки.
Заключение содержит выводы о работе.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ
1. Разработана архитектура интеллектуальной адаптивной обучаемой системы управления способной функционировать в условиях неполной априорной информации;
2. Синтезированы и исследованы модули управления направлением движения, скоростью и расстоянием от транспортного средства до цели.
4. Разработан и исследован генетический алгоритм обучения интеллектуальной адаптивной системы управления транспортными средствами в условиях неполной априорной информации.
5. Создан программный комплекс «NeuroAndFuzzy» для ЭВМ типа IBM PC на языке программирования C# в среде программирования Microsoft Visual 2006, предназначена для выбора параметров адаптивных обучаемых гибридных систем управления и их исследования.
ОСНОВНЫЕ ПУБЛИКАЦИИ ПО ТЕМЕ
Публикации, в изданиях относящихся к перечню ВАК
1. Коберси адаптивной нечеткой нейронной системы управления в условиях неопределенности. Сб. научно-технических статей «Вопросы специальной радиоэлектроники» //Под ред. д. т.н. . – Москва-Таганрог: , 2009. – 120‑128 с.
2. , Белоглазов адаптивная гибридная обучаемая система управления транспортными средствами. Известия ЮФУ. Технические науки. Тематический выпуск «Методы и средства адаптивного управления в электроэнергетике». – Таганрог: Изд-во ТТИ ЮФУ, 2010, №1 (102). – 260 с., С. 110-117.
3. , Шадрина нейронных сетей для управления энергопотреблением. Известия ЮФУ. Технические науки. Тематический выпуск. «Актуальные проблемы производства и потребления электроэнергии». – Таганрог: Изд-во ТТИ ЮФУ, 2008. № 7 (84) – 240 c., С. 190-196.
4. , , Application of fuzzy neural network to control parameters of trunk gas pipeline system. Известия ЮФУ. Технические науки. Тематический выпуск «Актуальные проблемы производства и потребления электроэнергии».‑ Таганрог: Изд-во ТТИ ЮФУ, 2009. № 5 (94) .‑ стр 133-142.
Публикации в других изданиях
1. , Белоглазов системы управления в условиях неопределенности. Труды Ежегодной научной конференции студентов и аспирантов базовых кафедр ЮНЦ РАН. – Ростов н/Д: Изд-во ЮНЦ РАН, 2009. С. 125-126.
2. Коберси алгоритмов обучения нейронных и гибридных систем управления в условиях неопределенности. Труды Международной научной конференции «Методы и алгоритмы принятия эффективных решений», (МАПР-2009), Часть 2. – Таганрог: Изд-во ТТИ ЮФУ, 2009. С. 40-41.
3. Коберси адаптивных обучаемых систем управления. Труды Ежегодной научной конференции студентов и аспирантов базовых кафедр ЮНЦ РАН. – Ростов н/Д: Изд-во ЮНЦ РАН, 2009. С. 134-136.
4. , Белоглазов недостатков методов классической теории управления. Сборник материалов докладов VII-й всероссийской конференции молодых ученых, аспирантов и студентов, «Информационные технологии, системный анализ и управление». – Таганрог: ТТИ ЮФУ, 2009. – С. 152 – 154.
5. Коберси интеллектуального адаптивного обучаемого гибридного модуля управления безопасностью автомобиля. Неделя науки – 2009: Материалы научных работ. – Таганрог: Изд-во ТТИ ЮФУ, 2009. – с. 56 – 58.
6. , , Шадрина адаптивных автоматных систем управления. Сборник трудов VII Всероссийской научно-практической конференции студентов, аспирантов и молодых ученых «Молодежь и современные информационные технологии». Томск, 25-27 февраля 2009г., ч.2. Томск: Изд-во СПБ Графикс, стр. 111-112.
7. , Шадрина построения адаптивных систем управления. Сборник трудов VII Всероссийской научно-практической конференции студентов, аспирантов и молодых ученых «Молодежь и современные информационные технологии» . Томск, 25-27 февраля 2009г., ч.1. Томск: Изд-во СПБ Графикс, стр. 71-72.
8. Коберси при реализации нечетких регуляторов. Сборник материалов докладов 6-й всероссийской научно-практической конференции студентов, аспирантов и молодых ученых «Молодежь XXI века – будущее российской науки» в 2 томах. Т.1 – Ростов-на-Дону, 2009. – С. 140 – 141.
9. Коберси нечеткого контроллера. Сборник материалов докладов VII-й всероссийской конференции молодых ученых, аспирантов и студентов, «Информационные технологии, системный анализ и управление». – Таганрог: ТТИ ЮФУ, 2009. – С. 175 – 177.
10. , Финаев нечеткого контролирования для микроконтроллеров. Труды Международной научной конференции «Информационное общество: идеи, технологии, системы», Часть 3. – Таганрог: Изд-во ТТИ ЮФУ, 2009. С. 92-93.
11. Коберси погрешности адаптивной гибридной обучаемой системы управления транспортными средствами. Международный семинар «Системный анализ, управление и обработка информации», Пос. Дивноморское СОСК «Радуга». Ростов-на-Дону 2010. – С. 98-100.
12. Коберси интеллектуальной гибридной адаптивной обучаемой системы управления транспортным средством с генетической настройкой. XI всероссийская научно-техническая конференция и школа молодых ученных, аспирантов и студентов «Научные исследования и разработки в области авиационных, космических и транспортных систем», АКТ (2010). г. Москва. – С. 300-308
13. Коберси алгоритма обучения интеллектуальной системы управления на основе генетических алгоритмов.
14. Коберси М. Д., , Балабаев и устройства систем управления. Таганрог, изд-во ТТИ ЮФУ, 2010 г. – 397 с.
Лично автором в работе [1] предложен метод разработки гибридной адаптивной обучаемой системы управления в условиях неопределенности; в работе [6] проведена классификация видов неопределенности; в работах [6, 7] проведены анализ и классификация адаптивных обучаемых систем управления; в работах [12, 14] предложены принципы построения и адаптация нечеткого регулятора для решения задач управления; в работах [15-17] разработана структура алгоритма обучения адаптивной системы управления транспортными средствами и представлены основные результаты исследований процессов функционирования и обучения разработанной системы.
Соискатель
Отпечатано на лазерном принтере. Тираж 100 экз. 2010 г.
