
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Применение многомасштабных моделей в задачах восстановления изображений
, ,
Муромский институт (филиал) Владимирского государственного университета
Введение
В процессе оцифровки и передачи изображение подвергается действию различного рода помех [1, 2]. Процесс искажения изображения может быть записан в виде: g[x,y]=DEG[f[x,y]] (1), где f[x,y] - идеальное изображение, g[x,y] - искажённое изображение, DEG[•] - искажающий оператор в пространственной области. Когда искажение изображения обусловлено исключительно наличием аддитивного шума (1) записывается следующим образом: g[x,y]=f[x,y]+e[x,y] (2), где e[x,y] - аддитивный шум. Операция восстановления изображения может быть записана следующим образом:  , где REC[•] - оператор восстановления изображения.
, где REC[•] - оператор восстановления изображения.
Многомасштабный алгоритм восстановления изображений
В [3] для восстановления изображения предложено использовать модель марковского случайного поля с фиксированной локальной областью. Модель задаётся множеством точек g={g[x,y]}, множеством локальных областей точек N={nx,y} и множеством областей Z={zx,y}, каждая из которых для рассматриваемой точки (x,y) включает саму точку и её локальную область. Принцип восстановления состоит в снижении энтропии условной плотности распределения вероятностей h(g|N=n) для каждой пары: "точка – локальная область". Это достигается изменением интенсивности каждой точки g[x,y] на основе алгоритма градиентного спуска. Алгоритм, описанный в [3] состоит из следующей последовательности шагов:
1) Для каждой области исходного изображения {zx,y} вычисляется величина  ;
;
2) На основе метода градиентного спуска формируется восстановленное изображение ![]() :
: ![]() ;
;
3) Полученное на предыдущем шаге изображение рассматривается как исходное ![]() , выполняются шаги 1 и 2 до тех пор, пока по некоторому показателю не будет достигнуто приемлемое качество восстановленного изображения.
, выполняются шаги 1 и 2 до тех пор, пока по некоторому показателю не будет достигнуто приемлемое качество восстановленного изображения.
Предлагается для описания изображения вместо модели марковского случайного поля использовать адаптивную модель многомасштабного марковского случайного поля. Эта модель основывается на следующих принципах:
1) Использование в качестве исходных данных адаптивной последовательности приближений La;
2) Использование адаптивной структуры локальной области na при описании связей между рассматриваемым коэффициентом последовательности La и набором соседних коэффициентов.
Предполагается, что использование описанной выше модификации позволит повысить качество восстановления изображений.
Предлагаемый алгоритм восстановления изображений состоит из следующих шагов:
1) Построение адаптивной последовательности приближений La исходного изображения [4].
2) Восстановление последнего элемента последовательности приближений, находящегося на самом грубом масштабе на основе адаптивной модели марковского случайного поля (с использованием адаптивной локальной области [5], этап инициализации):  ;
;
3) Последовательное восстановление остальных элементов последовательности приближений с применением адаптивной модели многомасштабного марковского случайного поля и описанного выше алгоритма: ![]() ,
,  .
.
Вычислительный эксперимент
В качестве тестового изображения используем изображение, показанное на рис. 1, дисперсия исходного изображения составляет σ=0.2445. Для искажения изображения используется гауссов шум с дисперсией σe. Оценка качества восстановленного изображения проводится на основе показателя "Отношение сигнал/шум" ("ОСШ") [6, 7] и "Индекс структурного подобия" ("ИСП") [8]. При проведении вычислительного эксперимента оценивается качество работы следующих подходов к фильтрации:
1) подход, на основе модели марковского случайного поля, предложенный в [3] (при проведении эксперимента используется локальная область 5x5 элементов);
2) подход на основе адаптивной модели многомасштабного марковского случайного поля.
В табл. 1 приведена оценка качества искажённых изображений.
Табл. 1. Оценка качества искажённых изображений
Метод оценки качества / Уровень шума | σe=0,01 | σe=0,04 | σe=0,07 | σe=0,1 |
ОСШ | 7,153971 | 2,444184 | 1,792052 | 1,510459 |
ИСП | 0,3435660 | 0,1881140 | 0,1422230 | 0,1173050 |
На рис. 1 и в табл. 2 показаны результаты восстановления изображений.
Табл. 2. Результаты восстановления изображений на основе подхода № 1
(используется локальная область 5x5 элементов)
Метод оценки качества / Уровень шума | σe=0,01 | σe=0,04 | σe=0,07 | σe=0,1 |
ОСШ (подход № 1) | 30,130077 | 12,786979 | 7,984558 | 5,750045 |
ИСП (подход № 1) | 0,760394 | 0,676539 | 0,585482 | 0,529169 |
ОСШ (подход № 2) | 32,507815 | 15,129014 | 9,474965 | 7,043615 |
ИСП (подход № 2) | 0,814480 | 0,725960 | 0,635920 | 0,562389 |
а. |
б. |
в. |
Рис. 1. Результаты восстановления изображения (σe=0,04) а. исходное изображение; б. искажённое изображение; в. восстановленное изображение на основе подхода № 2 |



Выводы по результатам экспериментов
На основе приведённых выше результатов экспериментов можно сделать следующие выводы:
1) При сравнении результатов восстановления изображений на основе модели марковского случайного поля с использованием фиксированной и адаптивной локальных областей с одинаковым количеством элементов можно отметить, что использование адаптивной локальной области, по сравнению с фиксированной, приводит к более лучшим результатам;
2) Использование адаптивного многомасштабного разложения в качестве исходных данных для многомасштабной модели марковского случайного поля при решении задачи восстановления изображений позволяет получить лучшие результаты по сравнению с фиксированным многомасштабным разложением;
3) Качество восстановления изображений на основе предложенного метода с использованием модели адаптивного многомасштабного марковского случайного поля, оцененное по ряду показателей, не хуже классических методов восстановления изображений, а в ряде случаев - лучше.
Заключение
В работе была рассмотрена адаптивная модель многомасштабного марковского случайного поля для решения задачи восстановления изображений. Основное её отличие от базовой модели заключается в использовании в качестве исходных данных адаптивной последовательности приближений, а для описания связей между коэффициентом последовательности и его соседями - локальной области с адаптивной структурой. Повышение точности фильтрации обусловлено тем, что предложенная модель позволяет более точно математически описать исходное изображение. Результаты эксперименты показали возможность использования предложенной модели для решения задачи восстановления изображений.
Литература
1. Цифровая обработка изображений в информационных системах: Учебное пособие / , и др. – Новосибирск.: НГТУ, 2002. – 352 с.
2. (1.1) Вудс, Р. Цифровая обработка изображений / Р. Вудс, Р. Гонсалес. – М.: Техносфера, 2005. – 1072 с.
3. Awate, S. P. Unsupervised, information-theoretic, adaptive image filtering for image restoration / S. P. Awate, R. T. Whitaker//IEEE Transactions on pattern analysis and machine intelligence. – 2006.– Vol. 28. – №. 3. – P. 1-13.
4. Гай, многомасштабный подход к представлению изображения / // Материалы XII Всероссийской научно-технической конференции студентов: Новые информационные технологии в научных исследованиях и образовании. – Рязань: РГРУ, 2007. – С. 161-163.
5. Гай, структуры локальной области в вейвлет алгоритмах обработки изображений / , // Системы управления и информационные технологии. – 2007. – № 2(28). – С. 82-86.
6. Heeger, D. J. A model of perceptual image fidelity / D. J. Heeger, P. C. Teo // Proc. IEEE Int. Conf. Image Processing, 1995. – P. 343–345.
7. Eskicioglu, A. M. Image quality measures and their performance / A. M. Eskicioglu, P. S. Fisher // IEEE Transaction on Communications. – 1995. – Vol. 43. – P. .
8. Bovik, A. C. Image quality assessment: from error visibility to structural similarity / A. C. Bovik, H. R. Sheikh, E. P. Simoncelli, Z. Wang // IEEE Transactions on image processing. – 2004. – Vol. 13. – №. 4. – P.600-612.
¾¾¾¾¾¨¾¾¾¾¾
The multiscale models using in images reconstruction tasks
Zhiznyakov A., Gai V., Fomin A.
Murom institute (branch) of the Vladimir state university
During digitization and transmitting an image can be exposure to different types of noise. To image reconstruction the model of markov random filed with fixed local area can be used.
The model determined by the set of pixels  , set of pixels local areas
, set of pixels local areas ![]() and set of areas
and set of areas ![]() , which for current pixel
, which for current pixel ![]() include this pixel and its local area.
include this pixel and its local area.
Reconstruction algorithm decrease entropy of conditional probability density ![]() for every pair: "pixel – local area". It arrives by modification of intensity of every pixel
for every pair: "pixel – local area". It arrives by modification of intensity of every pixel ![]() using gradient descent algorithm. Algorithm consists of the next sequence of steps:
using gradient descent algorithm. Algorithm consists of the next sequence of steps:
1) For every area of source image ![]() value
value ![]() calculated;
calculated;
2) Using gradient descent algorithm a reconstructed image ![]() are forming:
are forming: ![]() ;
;
3) Acquired at the previous step image reviewed as source ![]() , steps 1 and 2 are performed till, by some characteristic will not be achieved admissible quality of reconstructed image.
, steps 1 and 2 are performed till, by some characteristic will not be achieved admissible quality of reconstructed image.
To perform image reconstruction operation supposed instead of markov random field model using an adaptive model of markov random field. This model is based on next main principles:
1) Using as source data of adaptive sequence of approximations ![]() ;
;
2) Using adaptive structure of local area ![]() to description links between current coefficient of sequence
to description links between current coefficient of sequence ![]() and the set of neighbor coefficients.
and the set of neighbor coefficients.
Supposed, that using a reviewed modification of markov random field model allows raising a quality of reconstructed images.
Supposed algorithm to digital image reconstruction consists of the next steps:
1) Building adaptive sequence of approximations ![]() of source image.
of source image.
2) Reconstruction of the last element of the adaptive sequence of approximations, which are place at more coarse level of resolution, using adaptive model of markov random field (based on adaptive structure of local area, initialization step): ![]() ;
;
3) Sequential reconstruction of other elements of adaptive sequence of approximations using adaptive model of markov random field and reviewed algorithm: ![]() ,
, ![]() .
.
In the work was reviewed an adaptive model of markov random field to solving the task of image reconstruction. The main difference of supposed model from base model consists of using as source data adaptive sequence of approximations, and to description links between coefficients of sequence - local area with adaptive structure.
When the results of reconstruction of degraded image using model of markov random field with fixed structure of local area and model of adaptive model of markov random field with adaptive structure of local area can see that using of adaptive local area can increase the quality of reconstructed image.
The quality of image reconstruction, using supposed algorithm in comparison with classic algorithm, by some criterion are better. Using adaptive multiscale decomposition of source image for markov random field model of digital image allows to get better result in comparison with using of fixed multiscale decomposition.
Quality of image reconstruction condition on ability of supposed model more precisely to describe source image. The experimental results show a possibility of using of supposed model in the tasks of digital image reconstruction.
¾¾¾¾¾¨¾¾¾¾¾
ОЦЕНКА КОЭФФИЦИЕНТА КОНТРАСТА ПРИ СЕЛЕКЦИИ ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ НА ФОНЕ МЕШАЮЩИХ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ
¹, ², ³
¹Национальный аэрокосмический университет им. (ХАИ)
²Институт радиотехники и электроники РАН
³ Харьковский университет Воздушных Сил имени
Введение. В [1,2,9,10] приведены алгоритмы оптимальной и квазиоптимальной обработки принятых сигналов, ука-зывающие на необходимые совокупности действий по селекции изображений подповерхностных неоднородностей и воздушных целей на фоне отражений от границы раздела сред “воздух- земля”. За счет высокого градиента показателя преломления на граанице эти мешающие отражения оказывают существенное маскирующее воздействие на степень наблюдаемости как подповерхностных объектов, так и объектов, находящихся в воздухе над поверхностью. Приведенные алгоритмы предполагают комплексное использование пространственных, временных и спектральных (доплеровских) отличительных признаков. Оценкам совместного использования пространственных и спектральных отличительных признаков посвящены работы [3-5]. В докладе представлены особенности совместного использования пространственных и временных признаков в трехкоординатных многолучевых РСА, а также рассмотрены соответствующие показатели эффективности. В радиотехнических системах эти признаки проявляются естественным образом и практически одинаковы, как при селекции воздушных целей, так и при формировании изображений подповерхностных слоев почв. Они проявляются в том, что и цели, и элементы поверхности, а также элементы подповерхностного слоя, наблюдаемые в одном направлении, расположены на различных дальностях, которые соответствуют различным временам задержек отраженных сигналов. Аналогичные объекты, расположенные на одной дальности, имеют различные угловые координаты (углы места). В качестве показателя различимости объектов используется коэффициент контраста (КК). Он рассчитывается на основе моделирования разработанных алгоритмов, а оценивается отношением мощностей ![]() сигналов и пассивных помех после селекции.
сигналов и пассивных помех после селекции.
Определение коэффициента контраста. Геометрия задачи подповерхностного картографирования с помощью многолучевой РСА представлена на рис. 1. На рисунке для простоты рассуждений из многолучевой диаграммы направленности (ДН) выделен один парциальный луч и отмечены полезные отраженные импульсы, приходящие по главному лепестку, а также приходящие с тех же дальностей по боковым лепесткам мешающие импульсы, отраженные от верхней кромки подстилающей поверхности. Количественную оценку степени селекции как подповерхностных сред, так и целей, находящихся в воздухе на некоторой высоте, можно получить с помощью КК, который предлагается задать следующим произведением: ![]() , (1), где
, (1), где ![]() – КК обусловленный пространственным ослаблением помехи и зависящий от геометрического расположения отражающего участка мешающей поверхности в направлении, отличном от направления максимума диаграммы направленности;
– КК обусловленный пространственным ослаблением помехи и зависящий от геометрического расположения отражающего участка мешающей поверхности в направлении, отличном от направления максимума диаграммы направленности; ![]() – коэффициент, равный отношению эффективных поверхностей рассеяния цели и участка поверхности, взаимодействующего с зондирующим сигналом;
– коэффициент, равный отношению эффективных поверхностей рассеяния цели и участка поверхности, взаимодействующего с зондирующим сигналом; ![]() – коэффициент обратный коэффициенту затухания волн в подповерхностных слоях (равен единице при селекции воздушных целей). По существу КК – отношение сигнал/шум по мощности на одном из выходов диаграммообразующей схемы после согласованной фильтрации сигналов по времени, включающий в себя как синтез апертуры, так и фокусировку принятого сигнала по дальности.
– коэффициент обратный коэффициенту затухания волн в подповерхностных слоях (равен единице при селекции воздушных целей). По существу КК – отношение сигнал/шум по мощности на одном из выходов диаграммообразующей схемы после согласованной фильтрации сигналов по времени, включающий в себя как синтез апертуры, так и фокусировку принятого сигнала по дальности.
Коэффициент ![]() можно оценить как отношение мощностей сигналов, отраженного от цели в направлении главного лепестка и отраженных от земной поверхности, принимаемых по боковым лепесткам с одной и той же дальности при условии, что
можно оценить как отношение мощностей сигналов, отраженного от цели в направлении главного лепестка и отраженных от земной поверхности, принимаемых по боковым лепесткам с одной и той же дальности при условии, что ![]() (
(![]() ):
):  , (2),
, (2), ![]() ,
, ![]() . (3).
. (3).
Взаимное расположение нормированных функций ДН ![]() и функции неопределенности (ФН)
и функции неопределенности (ФН) ![]() показано на рис. 2. Угол
показано на рис. 2. Угол ![]() соответствует отклонению от направления максимального значения диаграммы направленности рассеивающего участка поверхности, взаимодействующего с зондирующим импульсом, расположенного на той же дальности, что и цель.
соответствует отклонению от направления максимального значения диаграммы направленности рассеивающего участка поверхности, взаимодействующего с зондирующим импульсом, расположенного на той же дальности, что и цель.
Результаты численного моделирования. Для численной оценки степени контраста были рассчитаны различные отношения форм ДН ![]() и ФН
и ФН  . В качестве амплитудного распределения (АР) поля в апертуре антенны при проведении численного моделирования использовались как классические весовые функции (окна) (ВФ), так и ВФ (окна) Кравченко и Кравченко-Рвачева [5-10]. По результатам численного моделирования КК сформированы таблицы (например, в таблице 1 представлены некоторые значения
. В качестве амплитудного распределения (АР) поля в апертуре антенны при проведении численного моделирования использовались как классические весовые функции (окна) (ВФ), так и ВФ (окна) Кравченко и Кравченко-Рвачева [5-10]. По результатам численного моделирования КК сформированы таблицы (например, в таблице 1 представлены некоторые значения ![]()
![]() и запас
и запас ![]() для типовых ситуаций: высот полета радиолокационной станции (РЛС), вида зондирующего сигнала (ЗС), огибающих АФ и ЗС, позволяющие в первом приближении оценивать степень пространственной селекции подповерхностных сред. Зависимости КК от длинны волны и вида ЗС, высоты полета радиолокатора, а также ВФ (окон), описывающих амплитудное распределение поля в апертуре синтезированной антенны и огибающую ЗС представлены на рис. 3. Из рисунка следует, что увеличение высоты полета носителя РЛС приводит к снижению КК. К снижению КК приводит также увеличение длительности ЗС, уменьшение коэффициента сжатия ЗС, увеличение угла наклона луча к поверхности. Коэффициент запаса, представленный в таблице 1, рассчитывается с помощью выражения
для типовых ситуаций: высот полета радиолокационной станции (РЛС), вида зондирующего сигнала (ЗС), огибающих АФ и ЗС, позволяющие в первом приближении оценивать степень пространственной селекции подповерхностных сред. Зависимости КК от длинны волны и вида ЗС, высоты полета радиолокатора, а также ВФ (окон), описывающих амплитудное распределение поля в апертуре синтезированной антенны и огибающую ЗС представлены на рис. 3. Из рисунка следует, что увеличение высоты полета носителя РЛС приводит к снижению КК. К снижению КК приводит также увеличение длительности ЗС, уменьшение коэффициента сжатия ЗС, увеличение угла наклона луча к поверхности. Коэффициент запаса, представленный в таблице 1, рассчитывается с помощью выражения
![]() . (4).
. (4).
|
|
Рис. 1. Сечения пространственной и временной ФН | Рис. 2. Взаимное расположение ФН |
Данные, приведенные в таблице 1, можно интерпретировать следующим образом. Пусть высота полета носителя РЛС составляет 150 м, а в качестве ЗС принят сигнал с линейной частотной модуляцией (коэффициент сжатия 10) длительностью  . Тогда коэффициент запаса для целей, находящихся на высоте 5 м (глубине 3,5 м) будет 45, 60,5 и 97 дБ соответственно. Для случаев, когда АР и ЗС без весовой обработки, применена обработка АР и ЗС ВФ Хэмминга и АР в ВФ Кравченко-Блэкмана-Хэрриса, а с огибающей ЗС – Кравченко-Гаусса. Угол наклона луча
. Тогда коэффициент запаса для целей, находящихся на высоте 5 м (глубине 3,5 м) будет 45, 60,5 и 97 дБ соответственно. Для случаев, когда АР и ЗС без весовой обработки, применена обработка АР и ЗС ВФ Хэмминга и АР в ВФ Кравченко-Блэкмана-Хэрриса, а с огибающей ЗС – Кравченко-Гаусса. Угол наклона луча ![]() .
.
Таблица 1. Значения ![]()
![]() и запас
и запас ![]() для типовых ситуаций
для типовых ситуаций
Прямоугольное окно | АР и огибающая ЗС в виде Хэмминга | АР в виде окна Кравченко-Блэкмана-Хэрриса и огибающая ЗС в виде Кравченко-Гаусса | |
Сигнал с линейной частотной модуляцией и коэффициентом сжатия 10 | |||
|
| ||
| 1,25 | 1,29 | 1,32 |
| 26,25 | 26,29 | 26,32 |
|
| ||
| 14,33 | 12,31 | 11,34 |
| 30,8 | 27,31 | 26,34 |
|
| ||
| 19 | 17 | 16 |
| 44 | 42 | 41 |
|
| ||
| 20 | 45,5 | 72 |
| 45 | 60,5 | 97 |
|
Рис. 3. Зависимость КК от: формы АР поля в апертуре антенны; вида ЗС и его огибающей; высоты полета радиолокационной станции (150м, 300м, 400м, 500м) |
Выводы. Таким образом, представлены результаты моделирования и расчетов коэффициентов контраста, равных отношению мощностей полезного сигнала и помех, отраженных соответственно от цели и элементов поверхности, находящихся практически на одной и той же дальности, а также в пределах одного и того же импульсного объема, соответствующего длине импульсного отклика РЛС после согласованной фильтрации принимаемых сигналов. В качестве основных отличительных признаков полезных сигналов и помех использованы пространственные отличительные признаки, обусловленные различным угловым расположением цели и отражающих элементов поверхности. Использование отличительных признаков обеспечивается естественным путем за счет формирования узкой диаграммы направленности антенной системы, направленной максимумом на цель. Показана эффективность наблюдения воздушных целей на фоне земной поверхности на малых и предельно малых высотах. Проведены исследования по наблюдению подповерхностных объектов или объектов скрытых лесными покровами. Последние имеют сравнительно невысокое затухание (до 10 дБ/м) – это сухие песчаные грунты, сухие суглинки известняковые породы, лес со сравнительно негустой листвой и т. п. Без учета затухания результирующая степень контраста может составлять десятки децибел для глубин превышающих 1÷2 м. В результате физического анализа различных комбинаций ВФ (окон) в качестве АР и огибающих ЗС показано, что применением ВФ (окон) Кравченко-Блэкмана-Хэрриса и Кравченко-Гаусса достигается наибольший контраст (~100 дБ). Особенно такой эффект наблюдается для высот более 5 м (глубин залегания ~3,5 м при угле наклона луча к поверхности ![]() ).
).
Литература
1. К, , Кутуза -временная обработка сигналов в многолучевых РСА с картографированием подповерхностных слоёв почв // Электромагнитные волны и электронные системы. –2006, № 2-3, т.11, С. 41-50.
2. , , Кутуза пространственн-временной обработки сигналов при подповерхностном картографировании на фоне мешающих отражений от верхней границы раздела сред // Радиотехника, Москва, №1, 2007, С.24-32.
3. , , Кутуза алгоритмы обработки радиолокационных изображений поверхностных и подповерхностных слоев с использованием весовой обработки сигналов многолучевых радиолокационных станций с синтезированием апертуры // Труды российского научно-технического общества радиотехники, электроники и связи им. . Серия: Цифровая обработка сигналов и ее применение. Вып. IX. Москва – 2007. – С. 358-361.
4. , , Фалькович электрофизических параметров почв при подповерхностном картографировании. – ДАН РАН. – 1994. – Т.338, №1. – С.29–32.
5. Кравченко по теории атомарных функций и некоторым их приложениям. – М.: Радиотехника, 2003.
6. , , Гусевский методы аппроксимации в теории антенн. – М.: САЙНС-ПРЕСС, 2005.
7. Kravchenko V. F., Volosyuk V. K. and Pavlikov V. V. The family of atomic functions and digital signal processing in synthetic aperture radar // The sixth international conference on antenna theory and techniques. Sevastopol, Ukraine, September 17-21, 2007. – Р. 20-25.
8. Volosyk V. K., Pavlikov V. V., Sevostyanov J. V. Spectrum analysis of radar signals with usage of Kravchenko windows. The sixth international Kharkov symposium on physics and engineering of microwaves, millimeter and submillimeter waves and workshop on terahertz technologies. Kharkov, Ukraine, June 25-30, 2007. – Р. 941-943.
9. Цифровая обработка сигналов и изображений в радиофизических приложениях. Под. ред. . М.: Физматлит, 2007.
10. , Кравченко теория радиотехнических систем дистанционного зондирования и радиолокации. М.: Физматлит, 2008.
¾¾¾¾¾¨¾¾¾¾¾
THE CONTRAST RATIO ESTIMATION FOR SUBSURFACE OBJECTS DISCRIMINATION CAUSED BY INTERFERING SURFACE BACKGROUND REFLECTION
Volosyuk V.¹, Kravchenko V.², Pavlikov V.³
¹National Aerospace University "Kharkov Aviation Institute"
² Institute of Radio-engineering and Electronics of RAS
³ Kharkov University of air forces
The modeling results and contrast ratios that are equal to ratio between useful signal power and noise are presented in the report. A useful signal and noise are reflected from target and surface elements respectively, they are located virtually at the same distance and within same pulse range with respect to the radar impulse response length after the received signals are matched. The spatial characters caused by different location of target angle and reflecting surface elements are used here as the main distinguishers. Using of these distinguishers are provided by intrinsic way due to narrow polar pattern antenna target maximum directed.
Because of modeling it is confirmed the possibility of effective control of the low and extremely low altitude flying air target caused by surface background and the possibility of effective control of the subsurface objects and forest concealed objects if they have comparatively moderate attenuation (under 10 dB/m) – are the dry sandy grounds, the loamy chalkstone layers, the thin forest, etc. The resultant contrast ratio degree can amount to tens decibel for altitudes (depths) exceeding 1÷2 m if the attenuation is negligible.
As a result of analysis of different weighting windows combinations as a basis for amplitude distribution and sounding signal envelopes it is shown that the largest contrast ratio (under 100 dB) is achieved by using of Kravchenko-Blаkman-Hаrris and Kravchenko-Gauss weighting windows accordingly, especially for altitude more 5 m (depth of occurrence more 3,5 m if the antenna beam pitch to surface is ![]() ).
).
¾¾¾¾¾¨¾¾¾¾¾
АВТОМАТИЗИРОВАННОЕ ФОРМИРОВАНИЕ ПРОСТРАНСТВ СТАТИСТИК ХАРАКТЕРНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ И ВРЕМЕННЫХ РЯДОВ
,
Рыбинская государственная авиационная технологическая академия им.
Введение
Разработка технологий и систем распознавания по цифровым сигналам уже давно является актуальной и очень важной научной и практической задачей. В последнее время наблюдается изменение принципов создания таких систем. Если раньше признаки и признаковые пространства (пространства образов) формировались специалистом предметной области [1, 2], то в ряде современных работ исследуются методы автоматизации формирования образа [3 – 5, 8]. В настоящей работе представлена новая технология автоматизированного построения признаковых пространств и систем распознавания по цифровым сигналам, позволяющая работать одновременно как с временными рядами, так и с изображениями в градациях серого.
Формирование признакового пространства
Характерная последовательность (ХП) – это кластер элементарных последовательностей (ЭП) множества рассматриваемых сигналов. ХП ![]() задается эталонной последовательностью
задается эталонной последовательностью ![]() , расстоянием
, расстоянием ![]() на множестве ЭП равного размера
на множестве ЭП равного размера ![]() и порогом
и порогом ![]() . Множество ЭП, попадающих в кластер
. Множество ЭП, попадающих в кластер ![]() обозначим
обозначим ![]() .
. ![]() определяется неравенством:
определяется неравенством: ![]() .
.
Распространенными расстояниями для сравнения последовательностей являются метрики Чебышева и СКО. Наряду с ними используется расстояние на основе коэффициента корреляции ![]() :
: ![]() , а также ряд дополнительных расстояний для работы с изображениями.
, а также ряд дополнительных расстояний для работы с изображениями.
Семейство признаков для формирования образа – это частотные признаки на основе ХП. При вычислении значения частотного признака ![]() производится перебор ЭП сигнала по заданному алгоритму
производится перебор ЭП сигнала по заданному алгоритму ![]() . Значение признака
. Значение признака ![]() вычисляется как отношение количества ЭП сигнала, попадающих в множество
вычисляется как отношение количества ЭП сигнала, попадающих в множество ![]() , к общему числу перебранных ЭП. Значение частотного признака можно интерпретировать как оценку вероятности попадания ЭП x сигнала в область
, к общему числу перебранных ЭП. Значение частотного признака можно интерпретировать как оценку вероятности попадания ЭП x сигнала в область ![]() . Выбор расстояния определяет форму области
. Выбор расстояния определяет форму области ![]() в координатном пространстве последовательностей. Порог позволяет управлять её размерами. Например, ХП с метрикой Чебышева в пространстве последовательностей соответствует гиперкуб с центром в эталонной последовательности, параллельными осям ребрами и стороной
в координатном пространстве последовательностей. Порог позволяет управлять её размерами. Например, ХП с метрикой Чебышева в пространстве последовательностей соответствует гиперкуб с центром в эталонной последовательности, параллельными осям ребрами и стороной ![]() .
.
Рис. 1. Структурные схемы: а) алгоритма формирования множества возможных признаков;
б) алгоритма поиска информативного пространства признаков
Пусть ![]() - обучающая выборка, а
- обучающая выборка, а ![]() - искомое признаковое пространство. Поиск признакового пространства
- искомое признаковое пространство. Поиск признакового пространства ![]() заключается в последовательном выполнении алгоритмов формирования множества возможных признаков
заключается в последовательном выполнении алгоритмов формирования множества возможных признаков ![]() (рис. 1а) и алгоритма поиска эффективного признакового пространства
(рис. 1а) и алгоритма поиска эффективного признакового пространства ![]() (рис. 1б).
(рис. 1б).
Множество возможных признаков строится на основе множества ХП (![]() ). Множество ХП формируется с помощью кластерного анализа последовательностей сигналов обучающей выборки
). Множество ХП формируется с помощью кластерного анализа последовательностей сигналов обучающей выборки ![]() . Для проведения кластерного анализа задаются расстояние
. Для проведения кластерного анализа задаются расстояние ![]() , порог
, порог ![]() , размер
, размер  и шаг перебора последовательностей. Формирование множества ХП производится для нескольких размеров последовательностей, расстояний и иногда для нескольких значений порогов. Таким образом, кластерный анализ последовательностей выполняется неоднократно, а полученные множества ХП объединяются. Длины последовательностей задаются на основе визуальной оценки графиков сигналов. На основе множества ХП формируется множество признаков с оптимальными порогами за счёт оптимальной по критерию максимума заданной меры информативности признаков
и шаг перебора последовательностей. Формирование множества ХП производится для нескольких размеров последовательностей, расстояний и иногда для нескольких значений порогов. Таким образом, кластерный анализ последовательностей выполняется неоднократно, а полученные множества ХП объединяются. Длины последовательностей задаются на основе визуальной оценки графиков сигналов. На основе множества ХП формируется множество признаков с оптимальными порогами за счёт оптимальной по критерию максимума заданной меры информативности признаков ![]() установки порогов для каждой из ХП. Далее из множества полученных признаков удаляется по одному из парно коррелированных признаков.
установки порогов для каждой из ХП. Далее из множества полученных признаков удаляется по одному из парно коррелированных признаков. ![]() - порог коэффициента корреляции, при превышении которого признаки считаются парно коррелированными.
- порог коэффициента корреляции, при превышении которого признаки считаются парно коррелированными.
При автоматизированном формировании множество возможных признаков ![]() имеет большие размеры (больше 500), поэтому выполняется отбор заданного числа наиболее информативных признаков. При этом формируется множество признаков
имеет большие размеры (больше 500), поэтому выполняется отбор заданного числа наиболее информативных признаков. При этом формируется множество признаков  . Далее выполняется случайный поиск с адаптацией (метод СПА), для которого необходимо задать меру информативности признаковых пространств
. Далее выполняется случайный поиск с адаптацией (метод СПА), для которого необходимо задать меру информативности признаковых пространств ![]() [2]. Информативность признакового пространства определяется кластерными свойствами расположения множеств точек, соответствующих разным классам. В отличие от алгоритмов оценки информативности пространств признаков
[2]. Информативность признакового пространства определяется кластерными свойствами расположения множеств точек, соответствующих разным классам. В отличие от алгоритмов оценки информативности пространств признаков ![]() , алгоритмы вычисления информативности признаков
, алгоритмы вычисления информативности признаков ![]() удаётся сделать более быстрыми: с линейной оценкой вычисления относительно размера обучающей выборки, что и определяет необходимость их отдельного использования.
удаётся сделать более быстрыми: с линейной оценкой вычисления относительно размера обучающей выборки, что и определяет необходимость их отдельного использования.
Испытания
В таблице 1 представлены задачи классификации по цифровым сигналам, для которых были синтезированы системы распознавания на основе ХП. На рис. 2 изображены примеры сигналов различных классов для этих задач. Для рассматриваемых задач в таблице 2 представлены оценки вероятности правильного распознавания p по методике Q.
nT – обозначение оценки вероятности правильного распознавания на основе независимой тестовой выборки, как доли правильно распознанных образов тестовой выборки. n – процентное выражение объема тестовой выборки от общего объема доступной выборки. Например, 76T для задачи № 1 означает, что объем обучающей выборки, использованной для формирования признакового пространства и классификатора составляет 48 сигналов (по 12 каждого класса), а объем тестовой выборки – 152 (по 38).
10CV – скользящий контроль по 10 блокам [3, 4]. Доступная выборка случайно разбивается на 10 частей с сохранением вероятностей появления образов каждого из классов. Рассматривается 10 разбиений доступной выборки на тестовую и обучающую. При этом тестовая выборка включает одну из частей, а обучающая все остальные. Для каждого разбиения i вычисляется доля правильно распознанных образов тестовой выборки pi. Оценка p – среднее значение всех pi:  .
.
Таблица 1. Задачи классификации по цифровым сигналам
№ | Название и источники | Описание сигналов | Классы сигналов | Кол-во |
1 | Переходные процессы [5 - 7] | Подмножество множества модельных сигналов, воспроизводящих недостатки оборудования ядерных электростанций - the Transient Classification Benchmark (TCB) | Класс 2 сигнал 2 | 50 |
Класс 3 сигнал 2 | 50 | |||
Класс 6 сигнал 3 | 50 | |||
Класс 7 сигнал 3 | 50 | |||
2 | Пистолет – палец [5 - 7] | Псевдовременные ряды из области видео-наблюдения. Сигналы отражают изменение координаты x центра тяжести правой руки актёра. | Актер достает пистолет | 100 |
указывает пальцем | 100 | |||
3 | Полупроводниковая пластина [4] | Последовательности значений интенсивности излучения, регистрируемые в процессе напыления при производстве полупроводниковых приборов | Процесс нормальный | 6402 |
аномальный | 762 | |||
4 | Фрагменты леса | Фрагменты телевизионных аэрофотоснимков в градациях серого. Размер фрагментов 40*40 пикселей. | Фрагменты леса | 497 |
Другие фрагменты | 687 | |||
5 | Машины [8] | Фрагменты изображений в градациях серого с низким разрешением. Размер фрагментов 120*40 пикселей. | Машина сбоку | 500 |
Без машины | 500 | |||
6 | Диагностика межвальных подшипников ГТД [9 - 10] | Вибрации, зарегистрированные с помощью прибора ИВУ-1М. Частота дискретизации 10 КГц. Длина реализации 30000 отсчетов. | Подшипник кондиционный | 22 |
некондиционный | 14 |
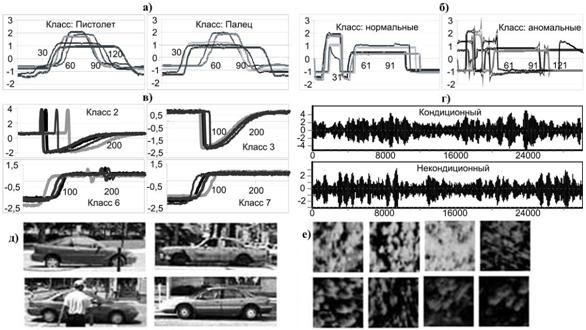
Рис. 2. Примеры сигналов для задач № 1 - № 6 (а – е, соответственно)
Методы оценки 1NN и 0T дают наиболее оптимистичные оценки. Алгоритм 1NN определяет долю правильно распознанных образов доступной выборки, причем распознавание каждого из образов производится по методу ближайшего соседа на основании всех оставшихся образов. 0T - оценка p, как доли правильно распознанных образов обучающей выборки. Т. е. обучение и тестирование производится на одной и той же выборке.
Для задач № 2, № 3, № 4 и № 5 системы распознавания, построенные на основе ХП имеют большую вероятность правильного распознавания p, чем система Zeus [3], системы на основе динамической трансформации времени [5 - 7], обобщенного формирования структурных признаков [4] и описания изображений на основе редких частей [8]. Кроме того, оценки p систем на основе ХП для задач № 1, № 3 и № 5 являются более пессимистичными, чем для других методов. Это следует из анализа применяемых методов оценки и соотношения долей обучающей и тестовой выборок.
Из-за небольшого размера обучающей выборки сопоставление эффективности систем распознавания для задачи № 6 выполняется на основе анализа разделимости образов кондиционных и некондиционных подшипников в различных признаковых пространствах [9, 10]. В пространстве признаков на основе ХП наблюдается полная разделимость и значительная разнесенность множеств образов (рис. 3) кондиционных и некондиционных подшипников.
![]()
Рис. 3. Распределение точек по первой главной компоненте признаков на базе ХП для задачи № 6
Таблица 2. Оценки качества систем классификации по методике Q
Метод | Задачи | ||||||||||
1 | 2 | 3 | 4 | 5 | |||||||
p,% | Q | p,% | Q | p,% | Q | p,% | Q | p,% | Q | ||
Частотные признаки на основе ХП | 100 | 76T | 100 | 75T | 99.98 | 90T | 89.3 | 55T | 96.3 | 60T | |
Метод динамической трансформации времени | [5] | 100 | 50T | 91.3 | 75T | 99.5 | 86T | - | - | - | - |
[6] | 100 | 1NN | 99 | 1NN | - | - | - | - | - | - | |
[7] | 100 | 1NN | 99.5 | 1NN | - | - | - | - | - | - | |
Система Zeus [3] | 100 | 10CV | 98.5 | 10CV | - | - | - | - | - | - | |
Обобщенное формирование структурных признаков [4] | - | - | - | - | 98.6 | 10CV | - | - | - | - | |
Описание изображений объектов на основе редких частей [8] | - | - | - | - | - | - | - | - | 78 | 0T | |
Заключение
Анализ пяти различных задач распознавания образов показал, что формирование признаковых пространств на основе ХП позволяет получить более эффективные процедуры распознавания, чем процедуры на основе динамической трансформации времени (DWT) [5 – 7]; процедуры, сформированные с помощью системы Zeus [3] и обобщенного формирования структурных признаков [4], а также описания изображений на основе редких частей [8]. Эффективные системы распознавания синтезированы как для переходных процессов с малой длиной реализации, так и для почти-периодических процессов. Также решены две задачи классификации фрагментов изображений в градациях серого (леса и машин), что является достаточно сложным (по очевидным причинам изменчивости изображений по контрасту, яркости, форме и часто низкого контраста объектов относительно фона). Испытания показали гибкость технологии распознавания на основе пространств статистик характерных последовательностей и возможность ее использования при решении широкого круга задач, что подтверждается более высокой вероятностью правильного распознавания при более пессимистичных и надежных процедурах её оценки.
Литература
1. Ту Дж., Принципы распознавания образов. – М: Мир, 1978.
2. Загоруйко распознавания и их применение. – М: Советское радио, 1972.
3. Eads D., Glocer K., Perkins S., Theiler J. Grammar-guided feature extraction for time series classification. Neural Information Processing Systems, 2005.
4. Olszewski R. T. Generalized Feature Extraction for Structural Pattern Recognition in Time-Series Data. PhD thesis, Carnegie Mellon University, Pittsburgh, PA, 2001.
5. Keogh E. UCR Time Series Archive: www. cs. ucr. edu/~eamonn/TSDMA/, 2007.
6. Ratanamahatana C. A., Keogh E. Everything you know about dynamic time warping is wrong. In 10th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining Workshop on Temporal Data Mining, 2004.
7. Ratanamahatana C. A., Keogh. E. Making Time-series Classification More Accurate Using Learned Constraints. SIAM International Conference on Data Mining, April 22-24, 2004.
8. Agrawal S., Roth D., Awan A. Learning to Detect Objects in Images via a Sparse, Part-Based Representation. IEEE Transactions of pattern analysis and machine intelligence, vol. 26, No. 11, November 2004.
9. , , Грызлова признаков для диагностики технического состояния трансмиссионных подшипников ГТД. // Авиационно-космическая техника и технология, № 8 (24). – Харьков, ХАИ, 2005.
10. , , Шепель состояния подшипников трансмиссии газотурбинных двигателей в пространствах статистик характерных последовательностей вибраций. //Авиационно–космическая техника и технология 10 / 36. - Харьков, ХАИ, 2006.
¾¾¾¾¾¨¾¾¾¾¾
