

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МПС РФ
РГОТУПС
СИСТЕМЫ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ
КОНСПЕКТ ЛЕКЦИЙ
Преп.
Каф. Транспортная связь
москва 2003
1. Введение 3
2. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ СИСТЕМ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ 6
2.1 Виды систем технической диагностики. 6
2.2 Математические методы принятия решения в системах технической диагностики и контроля. 11
2.3 Анализ контролируемых параметров и методы их обработки в системах диагностики и контроля устройств железнодорожной автоматики, телемеханики и связи. 14
2.4 Оценка погрешностей и требования к диагностическим датчикам.. 19
2.5 Реальное время в системах технической диагностики. 21
2.6 Построение измерительных трактов в системах технической диагностики устройств ЖАТ.. 22
3. ТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ СИСТЕМ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ 31
3.1 Техническая реализация систем диагностики с программной и аппаратной избыточностью.. 34
3.2 Построение измерительных трактов СТД с использованием внутренних шин ЭВМ... 41
3.3 Использование микроконтроллеров в СТД.. 44
4. Обзор существующих систем диагностики и контроля параметров устройств железнодорожной автоматики, телемеханики и связи 48
1. Введение
Устройства железнодорожной автоматики и телемеханики (ЖАТ) решают важную и ответственную задачу - обеспечивают безопасное управление перевозочным процессом. Разработка и внедрение новейших систем железнодорожной автоматики является актуальной научной задачей.
Обеспечение заданного уровня качества функционирования устройств ЖАТ требует разработки систем технической диагностики (СТД) и систем контроля (СК) [1]. Их внедрение позволяет выявлять предотказные состояния объекта контроля (ОК), что значительно сокращает количество опасных и защитных отказов устройств железнодорожной автоматики. Следствием этого является сокращение времени, затрачиваемого обслуживающим и ремонтным персоналом на путях и в других опасных зонах, а также повышение качества выполнения работ. При этом снижается время вынужденных задержек подвижного состава, вызванное проведением ремонтно-профилактических работ. Это особенно важно при переходе к безлюдной технологии обслуживания устройств ЖАТ. Требования высокого уровня достоверности информации о транспортных процессах обеспечивается использованием специализированных методов измерения первичной информации. Эти методы должны учитывать особенности работы устройств сигнализации, централизации и блокировки (СЦБ).
Наиболее трудоемким процессом в обслуживании устройств СЦБ является регулировка, проверка и приемка приборов в ремонтно-технологическом участке (РТУ) дистанции. В настоящее время процесс приемки автоматизируется с помощью специальных измерительных стендов на базе ЭВМ [2,3,4]. Применение современной техники позволяет пересмотреть нормативные документы по регламенту обслуживания и создать условия для увеличения рабочего ресурса аппаратуры. Это изменит периодичность технического обслуживания и ремонта проходящих через РТУ устройств ЖАТ. Внедрение автоматизированных рабочих мест (АРМ) систем технической диагностики не только повышает эффективность труда регулировщиков и приемщиков аппаратуры, но и значительно снижает роль «человеческого фактора» при определении состояния объекта диагноза (ОД).
В процессе реализации систем сбора данных и мониторинга состояния объектов железнодорожного транспорта, необходимо учитывать пространственную распределенность источников информации. Применение микропроцессорной техники и современной аппаратуры связи позволяет не только оперативно и с высокой достоверностью доставлять интересующую информацию в пункты ее концентрации, но и поднять процесс сбора данных и принятия решения на качественно иной, более высокий уровень.
Пространственная рассосредоточенность и разнообразие типов устройств ЖАТ требует принятия решения об их техническом состоянии на месте проведения измерений. Это позволит осуществлять процесс диагностирования в реальном масштабе времени и снизить информационную загрузку каналов связи. Эффективное использование вычислительных возможностей технических средств возможно при использовании алгоритмов с элементами самоорганизации, которые реализуются в объектных контроллерах. Все они должны соединяться в единую сеть, по которой в реальном масштабе времени данные стекаются в пункты концентрации информации, где принимается окончательное решение о техническом состоянии ОК. Принцип разделения в принятии такого решения позволяет повысить уровень его достоверности, уменьшает загруженность линий связи, повышает живучесть системы в целом с одновременной возможностью удаленного реконфигурирования и администрирования.
Стационарные, мобильные и распределенные системы диагностики и контроля должны иметь возможность работы в едином информационном пространстве. Данные, поступающие с различных систем, должны аккумулироваться в пунктах концентрации информации и иметь возможность быть доступными всем аккредитованным потребителям. Этому способствует развитие сетевых технологий в системах сотовой, радио, спутниковой и др. видов связи. Унификация представления данных позволит объединить разнородные системы в единое целое. Это даст возможность получения исчерпывающей и достоверной информации о состоянии устройств СЦБ, позволит объединить оперативный анализ и интерпретацию поступившей информации, приведет к ускорению принятия ответственных решений на соответствующих уровнях.
Однако, наличие помех и различного рода дестабилизирующих факторов в процессе получения первичной информации, недостаточный уровень образования обслуживающего персонала, может повлиять на ответ СТД, привести к возникновению ложного и необнаруженного отказов. Снизить возможность их появления до предельно низкого уровня должно стать применение методов самоорганизации в СТД, которые позволяют с успехом решать проблемы распознавания образов, выполнения прогнозов, оптимизации и управления. Это является одним из приоритетных направлений на современном этапе.
Разработка новых устройств ЖАТ требует развития систем диагностики и контроля с реализацией на принципах аппаратной и программной избыточности. Это позволяет адаптировать их под изменившиеся условия эксплуатации, что дает возможность реализации различных методов измерения и интерфейсов без проведения монтажных работ. Аппаратная избыточность позволяет уже на этапе проектирования реализовать программную избыточность (объем памяти, возможность адресации), а это самое главное условие для построения самоорганизующихся методов диагностирования и измерений, программной поддержки различных протоколов обмена информацией.
2. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ СИСТЕМ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ
2.1 Виды систем технической диагностики
Понятия «техническая диагностика» и «контроль технического состояния» определяются согласно ГОСТ [7].
Объект диагноза (ОД) представляют в виде устройства (рис.2.1), имеющего входы и доступные для наблюдения выходы. Процесс диагноза представляет собой последовательность операций, каждая из которых предусматривает подачу на входы объекта некоторого воздействия и определения на выходах реакции на это воздействие. Такую элементарную операцию называют проверкой p. В качестве выходов наблюдения могут служить основные или рабочие выходы системы, а также и дополнительные (контрольные) выходы.
Объект диагноза
Рис. 2.1.
Совокупность проверок, позволяющую решать какую-либо из задач диагноза, называют тестом: Т=p1,p2,....pn. под длиной теста L понимают число входящих в него проверок.
По назначению тесты делят на проверяющие и диагностические. Проверяющий тест Тn - это совокупность проверок, позволяющая обнаружить в системе любую неисправность из заданного списка (множества). Проверяющий тест решает задачи проверки работоспособности (в список включают только те неисправности, которые приводят к отказу системы).
Диагностический тест ТД - это совокупность проверок, позволяющая указать место неисправности с точностью до классов эквивалентных неисправностей. Он позволяет решать задачу поиска неисправностей.
С помощью теста строят процедуру диагноза, в основе которой лежит алгоритм диагноза, представляющий собой последовательность элементарных проверок, составляющих тест, и правила анализа результатов этих проверок. Алгоритм диагноза реализуется специальными устройствами, называемыми средствами диагноза. Взаимодействующие между собой объект диагноза и средства диагноза образуют систему диагноза.
В общем случае процесс диагноза представляет собой многократную подачу на объект определенных входных воздействий и многократное измерение и анализ ответов (выходных сигналов) на эти воздействия, которые могут поступать на входы объекта от средств диагноза или являться внешними (рабочими) сигналами, определяемыми рабочим алгоритмом функционирования устройства. Измерение и анализ ответов объекта всегда осуществляется средствами диагноза.
Системы технической диагностики, по своему функциональному назначению, подразделяются на два вида:
1. Тестовые. К ним относятся стационарные системы технической диагностики СТД, устанавливаемые, как правило, в специализированных помещениях, например, ремонтно-технологических участках, контрольно-измерительных пунктах и т. д.
2. Функциональные. Это, как правило, встроенные системы технической диагностики, контролирующие правильность работы аппаратуры ЖАТ.
Система тестового (а) и функционального (б) диагнозов
Рис. 2.2.
Система тестового диагноза предусматривает взаимодействие между средствами диагноза СД и объектом диагноза ОД (рис.2.2.а). Тестовые воздействия ТВ на ОД поступают только от СД. Поэтому как состав, так и последовательность подачи этих воздействий можно выбирать исходя из условий эффективности организации процесса диагноза. При этом каждое очередное воздействие можно назначать в зависимости от ответов О объекта на предыдущие воздействия. Воздействия в такой системе называют тестовыми.
В системе функционального диагноза (рис.2.2.б) СД не формирует воздействий на ОД. На ОД и СД поступают только рабочие воздействия РВ, предусмотренные рабочим алгоритмом функционирования объекта. Система диагноза работает в процессе рабочего функционирования и поиска неисправностей, нарушающих нормальное функционирование.
Схемы систем тестового (а) и функционального (б) диагнозов
Рис. 2.3.
В функциональной схеме системы тестового диагноза (рис.2.3.а) блок управления БУ служит для хранения алгоритма диагноза и управления работой средств диагноза. Источник воздействия ИВ вырабатывает воздействия aj элементарных проверок, входящих в тест, и в соответствии с алгоритмом диагноза в определенной последовательности подает их через устройство связи УС на объект диагноза ОД, а также на модель объекта диагноза МОД. Блок МОД вырабатывает информацию о возможных технических состояниях объекта в виде возможных результатов bj* элементарных проверок, входящих в тест. Объект диагноза в ответ на воздействия aj формирует фактические результаты bj элементарных проверок, которые через устройство связи УС и измерительное устройство ИУ поступают на вход блока расшифровки результатов БРР. В этом блоке сравниваются результаты элементарных проверок, снимаемых с выходов ОД и формируемых МОД. Результат сравнения запоминается в БРР, после чего БУ назначает очередную элементарную проверку, входящую в тест. Если назначение очередной проверки зависит от результата предыдущей, то между блоками БРР и БУ устанавливается прямая связь (показана штриховой линией).
В функциональной схеме системы функционального диагноза (рис.2.3.б) рабочие воздействия aj поступают на основные входы объекта ОД, с которого снимаются сигналы yj управления средствами УС диагноза и сигналы bj ответов ОД на воздействия aj. Сигналы yj управляют блоками БУ и МОД в зависимости от режима работы объекта, при этом на входы МОД поступают воздействия aj. Между блоками БРР и ОД устанавливается прямая связь, если на систему диагноза возлагается защита объекта управления от неправильного воздействия со стороны ОД при его повреждениях.
В конечном итоге процедура диагноза сводится к сравнению работы идеального устройства (задается модель ОД) и реального исследуемого устройства. Число неисправностей в реальном устройстве, как правило, велико, поэтому процедура диагноза сложна и требует большого числа измерительных и вычислительных операций. Для проведения процедуры диагноза требуется решение основных задач: выбор и построение модели ОД, синтез теста, построение алгоритма диагноза, синтез и реализация средств диагноза.
2.2 Математические методы принятия решения в системах технической диагностики и контроля
Для диагностирования устройств ЖАТ используют два основных метода: комбинационный и последовательный.
При комбинационном методе на определенные входы объекта подают соответствующие электрические сигналы с последующей регистрацией характера выходных сигналов. Сравнением полученных выходных сигналов с теми, которые должны быть, судят об исправности данного блока, узла или подсистемы. Такой метод применяется при проверке блоков на специальных стендах.
Последовательный метод используют при наличии факта отказа и неисправности. Различают такие разновидности этого метода как внешний осмотр, замена неисправных элементов и измерение параметров. Для наиболее рациональных поиска и устранения неисправностей используют последовательный перебор, при котором поочередно проверяют все элементы схемы. Для оптимизации процесса проверки в качестве критерия наиболее рациональной последовательности проверок выбирают отношение ti/Pi, где ti- время необходимое для проверки и устранения неисправности; Pi- вероятность возникновения данной неисправности. Проверку начинают с минимального значения этого соотношения.
К последовательному относится и метод «средней точки», который имеет несколько разновидностей, различающихся по количеству элементов и вероятностям отказов. Суть его состоит в разделении всех элементов системы на группы. Каждая из групп последовательно делится на два по количеству элементов и, таким образом, локализуется место возникновения неисправности. Существуют и вероятностные подходы к реализации этих методов [33].
Анализ приведенных методов диагностирования показал неэффективность их применения к внедряемым на сети железных дорог усовершенствованным системам ЖАТ, реализованных на электронной элементной базе с использованием микропроцессоров.
Большинство систем строятся с использованием микропроцессоров, цифровых и аналоговых сборок. Высокая степень интеграции снижает достоверность и глубину оценки состояния устройства при помощи измерения параметров на доступных выводах, затрудняет определение степени влияния на диагностируемый модуль смежных с ним узлов. В силу огромного числа состояний дискретных устройств («проклятия размерности») невозможно произвести их полный перебор. Экспертная оценка электромехаников, выполняющих проверку, не всегда достоверна вследствие присутствия человеческого фактора, недостаточной квалификации. В связи с этим, для диагностики современных систем ЖАТ необходимо использовать самоорганизующиеся методы принятия решений.
Перспективным направлением для развития отвечающим этим требованиям СТД, является использование теории искусственных нейронных сетей (ИНС) и метода группового учета аргументов МГУА [34]. Анализ архитектур различных нейронных сетей и алгоритмов, применение которых целесообразно в системах диагностики и контроля СЖАТ, позволяет разбить их на следующие категории (рис.2.4).
В иностранной литературе такое направление получило название «теория искусственных нейронных сетей» (Neural Networks Theory). Любая подобная структура может рассматриваться как направленный граф со взвешенными связями [35].
Одной из разновидностей многослойных ИНС является сеть, построенная на основе методики МГУА (метод группового учета аргументов) [38]. Существует несколько разновидностей таких структур. Нейронная сеть позволяет на основе обучающей выборки построить зависимость одного параметра от других в виде полинома и найти скрытые зависимости в данных. Важнейшим фактором в процессе принятия решения здесь является выбор класса опорных функций.
Иерархия методов теории искусственных нейронных сетей
Рис.2.4
Существуют три парадигмы обучения: "с учителем", "без учителя" (самообучение) и смешанная. В первом случае нейронная сеть располагает правильными ответами (выходами сети) на каждый входной пример. Веса настраиваются так, чтобы сеть выдавала ответы как можно более близкие к известным правильным ответам. Усиленный вариант обучения с учителем предполагает, что известна только критическая оценка правильности выхода нейронной сети, но не сами правильные значения выхода.
Обучение без учителя не требует знания правильных ответов на каждый пример обучающей выборки. В этом случае раскрывается внутренняя структура данных или корреляции между образцами в системе данных, что позволяет распределить образцы по категориям. При смешанном обучении часть весов определяется посредством обучения с учителем, в то время как остальная получается с помощью самообучения.
Известны четыре основных типа правил обучения: коррекция по ошибке, машина Больцмана, правило Хебба и обучение методом соревнования. При обучении с учителем для каждого входного примера задан желаемый выход d. Реальный выход сети y может не совпадать с желаемым. Принцип коррекции по ошибке при обучении состоит в использовании сигнала (d-y) для модификации весов, обеспечивающей постепенное уменьшение ошибки. Обучение имеет место только в случае, когда персептрон ошибается. Известны различные модификации этого алгоритма обучения [35].
2.3 Анализ контролируемых параметров и методы их обработки в системах диагностики и контроля устройств железнодорожной автоматики, телемеханики и связи
Актуальной технической задачей является разработка систем ТД, отвечающим высоким требованиям надежности и безопасности движения поездов при минимальном составе оборудования, высокой экономической эффективности.
Для решения этого вопроса необходим глубокий анализ параметров эксплуатируемых устройств СЦБ и видов отказов в них, выбор оптимального числа контролируемых параметров, требуется разработка эффективных и надежных методов и алгоритмов идентификации состояния ОД, высокоточных и быстродействующих методов измерения.
Значительная часть объектов контроля не только распределена вдоль железнодорожного полотна и находится на больших расстояниях друг от друга, но и постоянно взаимодействуют друг с другом [6]. При этом не допускают перерывы в их работе. Это требует разработки не только способов и методов передачи информации диагностического характера, определения оптимальной структуры системы контроля, но и разработки методов диагностирования, которые могут быть реализованы в таких системах. Учитывая рассосредоточенность контролируемых объектов, СК должна иметь высоконадежный канал связи между отдельными уровнями иерархической структуры. Такая структура должна обладать универсальностью, то есть пригодностью для использования при диагностике различных по сложности и выполняемым функциям объектов контроля, что достигается применением реконфигурируемых технических средств.
Отказы устройств СЦБ могут быть разделены на внезапные и постепенные. Возникающие с определенной вероятностью внезапные отказы не поддаются прогнозированию. При постепенных отказах напротив, возможно оценить характер изменения параметров ОК и на основании этого прогнозировать его состояние во времени. Согласно статистическим данным, постепенные отказы в устройствах СЦБ составляет 40-50%, а внезапные – 55-60% [8]. Поэтому эффективное использование систем контроля технического состояния и оперативный ремонт в КИПах позволит уменьшить число отказов на 40-50%, сократить время обнаружения неисправности на 25-30%.
Важнейшими характеристиками любой СТД является число и набор контролируемых параметров. Так, при диагностике, необходимо обеспечить непрерывный контроль исправности объекта диагностирования. Минимальное число контролируемых параметров при этом должно быть достаточным для достоверной оценки работоспособности устройств СЦБ.
С другой стороны, к СТД предъявляются определенные требования по надежности, стоимости, потребляемой мощности и т. д. Для полноты контроля следовало бы выбирать максимальное количество контролируемых параметров. Вместе с тем, увеличение числа этих параметров усложняет систему, снижает ее надежность и увеличивает стоимость проектирования и изготовления. Отсюда количество контролируемых параметров не должно превышать число, которое необходимо для выполнения технических и экономических требований к СТД.
Таблица 2.1
Перечень наиболее частых видов отказа в устройствах СЦБ
Наименование отказавшего устройства | Доля среди всех устройств, % |
рельсовые цепи | 46.9 |
устройства формирования кодовых сигналов | 8.1 |
источники питания | 7.6 |
светофорные лампы | 7.3 |
путевые реле | 7.3 |
кабельные линии | 7.2 |
дешифраторные ячейки | 6.1 |
сигнальные цепи | 5.3 |
прочие отказы | 4.2 |
Внедрение СТД осуществляющей непрерывный контроль работоспособности устройств обеспечивает прогнозирование работы элементов объекта контроля, характеризующихся постепенными отказами. Данные об отказах, расположенные в порядке возрастания их интенсивности [8], приведены в табл.1.2. Каждый вид устройств СЦБ имеет свой набор контролируемых параметров, которого достаточно для определения технического состояния объекта контроля.
Таблица 2.2
Интенсивности отказов устройств ЖАТ
Вид устройства СЦБ | Интенсивность, 1/ч 10-6 |
Электродвигатель | 1.5 |
Пневматическая обдувка | 1.5 |
Кодовый путевой трансмиттер | 1.8 |
Изоляция монтажа кабеля | 2.7 |
Релейные схемы ЭЦ | 2.9 |
Аккумуляторы станционных батарей при максимальной нагрузке | 4.5 |
Электрические стрелки | 4.6 |
Схема открытия (закрытия) автошлагбаума | 5.5 |
Стабилитронный блок | 5.7 |
Емкость конденсаторов | 4.3 |
Трансмиттерное реле | 8.9 |
Рельсовая цепь | 9 |
Дешифраторные ячейки | 9.2 |
Лампы светофоров | 14.9 |
Устройства звуковой и световой сигнализации | 14.9 |
Изолирующие стыки | 25.5 |
Подключенный к СТД объект диагноза может оказаться в исправном, работоспособном, работоспособном неисправном, а также в неисправном и неработоспособном состояниях [9]. Так, к примеру, за основной параметр, определяющий техническое состояние рельсовой цепи, берется напряжение на релейном конце. В нормальном режиме работы рельсовая цепь считается исправной, если напряжение на путевом реле находится в установленных пределах для данного типа РЦ. В случае снижения напряжения на путевом реле не ниже напряжения прямого подъема, РЦ все еще будет выполнять свои функции (при занятии и освобождении блок-участка положение путевого реле будет соответствовать фактическому состоянию РЦ). Отсюда ее техническое состояние является неисправным, поскольку напряжение на реле ниже установленных для данной РЦ нормы, но работоспособным.
Анализ контролируемых параметров устройств СЦБ показал, что в основном, для контроля их технического состояния, необходимо измерение постоянных и переменных напряжений и токов, а также сопротивлений. Измерение же величины тока и сопротивления сводится к измерению напряжения. При этом, амплитудное значение сигнала может меняться от нескольких сотен вольт (питающие фидеры) до десятков милливольт (контрольные точки микроэлектронных устройств).
Для достоверного измерения параметров переменного напряжения требуется априорное знание его частотного диапазона. Для осуществления процесса диагностирования устройств СЦБ, технические средства должны иметь возможность измерения гармонического сигнала с частотой до 20 кГц, т. е. перекрывать весь звуковой диапазон. Согласно теореме Котельникова [10], частота дискретизации при этом должна быть в пределах 50..60 кГц. Специфика работы аппаратуры СЦБ (переходные процессы, броски напряжения) требует от измерительного устройства надежности и продолжения измерительного процесса в неожиданно изменившемся диапазоне амплитуд. Это происходит вследствие различного рода отказов в аппаратуре служб электроснабжения, СЦБ, пути и др. Так, неисправность стыкового соединителя приводит к асимметрии тягового тока и, как следствие, напряжение на приемном конце рельсовой цепи возрастает в десятки раз.
Измерение параметров переходного процесса особенно важно при диагностировании релейных блоков ЭЦ и отдельных реле. Это позволяет оценивать параметры реле при отсутствии свободных контактных групп с одновременным снижением затрачиваемого времени.
Согласно требованиям безопасного подключения СТД к действующим устройствам СЦБ, измерительные цепи в любом своем состоянии не должны оказывать влияние на ОД [9]. При измерении контролируемых параметров необходимо обеспечить изоляцию измеряемых цепей от измерительных и измеряемых цепей друг от друга. Главным критерием качества СТД должна являться достоверность контроля. Исходя из этого, можно сделать следующие выводы:
- измерительный тракт должен иметь оптоэлектронную гальваническую развязку входных цепей с оставшейся частью схемы;
- иметь возможность программной реконфигурации своей структуры для согласования своих параметров с параметрами объекта диагноза. Реконфигурация позволяет аппаратно реализовывать различные методы измерения и интерфейсы сопряжения.
2.4 Оценка погрешностей и требования к диагностическим датчикам
Для оценки состояния объекта необходимо иметь первичную информацию о состоянии его элементов, блоков и отдельных узлов. Формирование такой информации можно получить с помощью специальных устройств — пороговых диагностических датчиков. Основное их назначение состоит в качественной оценке параметров контроля.
Под качеством в данном случае понимают точность измерения контролируемых величин при минимально допустимых погрешностях. Кроме того, мерой качества датчиков будем считать «цену», вносимую каждым из них в оценку работоспособности объекта. Критерий качества можно выразить остаточной неопределенностью (энтропией) исследуемой системы после определения ее состояния. В свою очередь, качество в реальных условиях определится остаточной энтропией технических средств. Этот параметр зависит от погрешностей датчиков ССИ (без учета аппаратуры канала связи), в которых при передаче информации имеют место незначительные потери информации. Эта величина показывает, какова относительная доля оставшейся неопределенности в состоянии объекта ж. д. транспорта будет после определения его состояния. По своей сути ее можно назвать апостериорным относительным коэффициентом неопределенности.
Степень влияния диагностического устройства на контролируемый объект будет определяться параметрами эквивалентной схемы элемента или схемой датчика. Для обеспечения согласованной работы датчиков при подключении их к нагрузке необходимо выполнить следующие условия: для потенциальных датчиков ZДАТ>ZН; для токовых датчиков наоборот.
Следовательно, безопасное подключение датчиков в выбранных контрольных точках должно обеспечиваться элементами согласования, в качестве которых целесообразно использовать изолирующие разделительные трансформаторы, входные ограничивающие резисторы и др. Тогда можно сформулировать следующие требования к датчикам контроля:
- диагностические датчики должны обеспечить максимум информации о работоспособности объекта контроля;
- параметры входных цепей датчиков должны быть такими, чтобы исключить мешающее их воздействие на объект контроля при минимально допустимых погрешностях;
- датчики должны обеспечить четкую фиксацию и измерение контролируемых параметров в пределах «норма», «выше нормы», «ниже нормы» в широком диапазоне температуры окружающей среды;
- отказ или неисправность датчиков не должны приводить объект контроля в неработоспособное состояние; релейная характеристика пороговых датчиков должна иметь высокий коэффициент возврата (0,9—0,95);
- мощность, отбираемая датчиком, должна быть на 2—3 порядка ниже мощности, потребляемой объектом контроля; датчики должны иметь небольшие массу и размеры.
Кроме того, к датчикам контроля работоспособности устройств автоматики и телемеханики предъявляют и дополнительные, специфические требования. Они должны исключать опасные отказы, снижающие безопасность движения поездов.
При решении целого ряда технических задач используют множество типов и схем датчиков. Анализ работы существующих датчиков показал, что не все они практически применимы для работы на ж. д. транспорте. Это объясняется тем, что их трудно согласовать с выходными цепями контролируемых элементов, они не позволяют фиксировать пороговые значения параметров в необходимых пределах. Схемы датчиков построены без учета специфики работы устройств автоматики и телемеханики и обеспечения безопасности движения поездов, датчики имеют низкий коэффициент возврата и т. д. К этому следует добавить, что в системе диагностирования указанных устройств требуются датчики с возможностями прогнозирования контролируемых параметров, многопороговые, многопозиционные.
В зависимости от способа измерения параметров датчики подразделяются на токовые, потенциальные и комбинированные. Они могут быть активными и пассивными. Активные датчики для своего функционирования требуют источников питания, в противном случае они являются пассивными. По способу фиксации контролируемых параметров датчики могут быть непрерывного действия и дискретные, а по числу ступеней порогов измеряемого параметра — одно - и многопороговые.
Согласно основным требованиям активные датчики должны обеспечить согласование и развязку входных цепей, их выходной сигнал должен быть достаточен для срабатывания последующих элементов системы передачи и обработки информации.
2.5 Реальное время в системах технической диагностики
Определение реального времени зависит от конкретной задачи и связано с объемом вычислений алгоритма, точностью вычислений и частотой дискретизации (периода дискретизации). Пусть Т— период дискретизации (рис.2.5), та — время выполнения алгоритма.
Цифровая система работает в реальном времени, если время выполнения алгоритма не превышает периода дискретизации. Для СТД это означает, что принятие решения о техническом состоянии ОД происходит непрерывно в зависимости от изменения контролируемых параметров. При этом передача этой информации возможна лишь по мере ее изменения, степени важности и т. д.
Это означает, что остается еще некоторый запас времени, обычно называемый временем ожидания tож. Найти время выполнения алгоритма можно, если знать время выполнения элементарной (одноцикловой) команды tк, называемое командным циклом, и количество командных циклов Na, необходимое для выполнения алгоритма (это можно определить в процессе отладки). Тогда
Дискретное измерение входного параметра

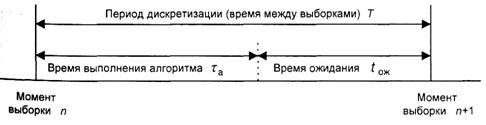
Рис.2.5
2.6 Построение измерительных трактов в системах технической диагностики устройств ЖАТ
Для оценки работоспособности объекта контроля необходимо иметь первичную информацию о состоянии его элементов, блоков и отдельных узлов. Формирование такой информации можно получить с помощью специальных измерительных устройств, реализованных на микропроцессорной основе [56].
Требуемые значения достоверности контроля могут быть достигнуты следующим образом:
1) уменьшением погрешностей измерений;
2) совершенствованием моделей технической диагностики и измерений.
Аналоговые методы измерения затруднительно использовать в автоматизированных СТД устройств ЖАТ вследствие особенностей их эксплуатации и сопряжения с вычислительными средствами [59, 60].
Цифровые методы измерения используют цифровую фильтрацию и спектральный анализ. Эти методы обеспечивают различную точность измерения и время получения результата [61, 62].
Получение цифрового эквивалента аналоговой величины осуществляется аналого-цифровыми преобразователями (АЦП) различных типов, в том числе встроенными в микроконтроллер. При измерении постоянного напряжения или сигнала, изменяющегося сравнительно медленно (до нескольких сотен кГц), используют АЦП последовательного приближения. В случае необходимости измерения быстроизменяющегося сигнала целесообразнее использовать АЦП параллельного типа.
Применение обратной связи в измерительном канале повышает достоверность результата измерений даже при значительных отклонениях характеристики измерительного тракта от идеальной. Достоинство этих методов также заключается в том, что применяя АЦП с малым количеством разрядов, достигается более высокая точность измерений за счет изменения структуры канала, увеличения объема и времени обработки результатов измерений.
Вместе с тем, методы измерений в системах технической диагностики неразрывно связаны с математическими моделями, определяющими техническое состояние объекта диагноза. Поскольку в процессе диагностирования структура модели может измениться, это может потребовать реконфигурацию аналоговых трактов в целях повышения эффективности их взаимодействия. Она заключается в согласовании диапазона измерения АЦП и амплитуды сигнала, в аппаратной поддержке масштабирования признакового пространства и адаптации к параметрам каналов связи и т. д.
Таблица 2.2
Технические возможности преобразователей
Тип | Разрешающая способность, бит | Время преобразования, мкс | Стоимость, условные единицы |
Аналого-цифровые преобразователи | |||
ADS831 | 8 | 1/80 | 2,95 |
ADS828 | 10 | 1/75 | 9,75 |
TLV1572 | 10 | 1,25 | 3,09 |
ADS809 | 12 | 1/80 | 29,95 |
ADS804 | 12 | 1/10 | 9,95 |
ADS803 | 12 | 1/5 | 6,95 |
ADS850 | 14 | 1/10 | 19 |
THS14F01 | 14 | 1 | 9,74 |
AD7664 | 16 | 500 | 18 |
ADuC824 | 24 | 50∙103 | 25 |
Цифро-аналоговые преобразователи | |||
DAC908 | 8 | 1/200 | 3,15 |
THS8134B | 8 | 1/80 | 6,16 |
DAC900 | 10 | 1/200 | 5,15 |
DAC902 | 12 | 1/200 | 7,75 |
DAC904 | 14 | 1/200 | 9,95 |
AD5542 | 16 | 1 | 20 |
Рассмотрим метод измерения основанный на компенсации значения входной величины эталонной [64]. Данный метод построен на принципе временного и пространственного разделения каналов, который реализован в цифровом и аналоговом трактах (рис.2.6). При пространственном разделении измерительных каналов коммутация входного сигнала не требуется, что полностью исключает использование аналоговых мультиплексоров для переключения пределов измерений. Это, в свою очередь, повышает надежность и быстродействие измерительного тракта, позволяет реализовать предлагаемый метод в «системах на кристалле».
Функциональная схема измерительного тракта

Функциональная схема метода состоит из цифровой и аналоговой частей. Цифровой тракт содержит аппаратные средства, предназначенные для осуществления арифметических и логических операций над данными согласно алгоритму проведения измерений. В его задачу входит синхронизация всех функциональных узлов схемы.
В аналоговом тракте модуль обратной связи (ОС) преобразует цифровой двоичный код y1 в аналоговый сигнал ∆x1, который поступает на вход сумматора. Также на вход сумматора подается измеряемый сигнал x0. С выхода сумматора разностный сигнал ∆x через масштабирующий усилитель (МУ) приходит на АЦП. С его выхода цифровой эквивалент аналогового сигнала y подается в цифровой тракт, где происходит его дальнейшая обработка.
Измеряемое напряжение x0 поступает на вход аналогового сумматора. Тогда разностное напряжение на его выходе:
Δx*= x0- y1-δос, (2.1)
где y1- аналоговый эквивалент двоичного кода напряжения {y1};
δос - сумма аддитивной и мультипликативной погрешности ОС.
Напряжение на выходе прямого преобразователя (ПП) y с учетом (2.1):
 , (2.2)
, (2.2)
где δпп - сумма аддитивной и мультипликативной погрешности ПП.
Параметры измерительного тракта не должны изменяться во время проведения измерительной процедуры δос=const, δпп=const. Согласно структурной схеме метода (рис.2.6) результат измерения {y0} будет равен:
 . (2.3)
. (2.3)
Указанные соотношения должны выполняться во всем частотном диапазоне изменения погрешностей.
Рассмотрим алгоритм проведения измерений. Полный цикл состоит из двух тактов (рис.2.7).
В первом такте на модуль ОC из цифрового тракта (рис.2.6) поступает нулевой двоичный код {y1}=0, k=1. Запускается быстродействующий АЦП параллельного типа и согласно (2.1) измеряет величину:
Δx*= x0-δос. (2.4)
Таким образом, АЦП измеряет значение входного напряжения вместе с напряжением, которое обусловлено погрешностью выставления аналогового эквивалента нулевого двоичного кода трактом обратной связи. Подставляя (2.1), (2.2) в (2.3) имеем результат первого такта преобразований:
![]() . (2.5)
. (2.5)
Полученный двоичный код {y0} вновь поступает на вход. Одновременно МУ устанавливает заданный коэффициент масштабирования k≥1.
Временная диаграмма измерительной процедуры
Второй такт измерения начинается после окончания процесса установления напряжения на выходе ОП и смены коэффициента усиления МУ. Запускается АЦП для измерения теперь уже разностного сигнала, который вычисляется по (2.1) с учетом того, что {y1} присваивается значение {y0}. Поскольку за время установления значений k и Δx* входной сигнал x мог измениться на Δx, то согласно (2.4) и (2.3) будет получен следующий результат:
![]() ;
;
![]() . (2.6)
. (2.6)
К модулю ОС накладываются повышенные требования по точности выставления напряжения. Из (2.6) видно, что погрешность модуля обратной связи входит в результат измерений аддитивно и напряжение ошибки не компенсируется прямым преобразователем. К прямому преобразователю напротив, требования по точности могут быть значительно снижены за счет того, что его аддитивная и мультипликативная погрешности снижаются в k раз. При k→∞ на результат измерений будет влиять лишь погрешность обратного преобразователя.
Проведем сравнительную оценку работы модифицированного компенсационного метода измерений по сравнению с другими методами, получившими широкое распространение в системах ж. д. диагностики и контроля. В качестве таковых, были выбраны прямой и итерационный методы измерения. Данный выбор основан на быстроте работы и простоте в реализации первого, и высокой достоверности получения результата второго. Структурные схемы методов изображены на рис.2.8, а алгоритмы их работы рассмотрены в [64].
Структурные схемы методов измерений
В качестве компонентов схем будем использовать распространенные элементы, электрические и временные параметры которых представлены в табл.2.2.
Отличие компенсационного метода измерений от остальных заключается в том, что снижение погрешности в нем основано на выполнении вспомогательных операций в процессе измерения, что требует избыточности по быстродействию, а также программной избыточности. Кроме того, коэффициент k может задаваться моделью диагностирования при аппаратной реализации составных частей методов кластеризации и масштабирования признакового пространства.
График на рис.2.9а показывает, что с ростом нелинейных искажений измерительного тракта (ИТ), погрешность прямого метода растет линейно, т. к. сам метод не предусматривает коррекцию этих искажений. Характер изменения погрешности в итерационном методе объясняется тем, что на результат влияют лишь параметры тракта обратной связи, к которому предъявляются повышенные требования.
Результаты моделирования методов измерения

Результаты моделирования показывают, что при разрешающей способности измеренных данных от 16 до 24 двоичных разрядов, модифицированный компенсационный метод заполняет пробел отсутствия приемлемых по скорости и точности методов измерения на базе существующих технических средств. Компенсационный метод более эффективен для измерения сигналов с частотами до 100-500 кГц при использовании равноценных с другими методами измерений АЦП. Так, например, на частоте 1 кГц, может быть достигнут коэффициент масштабирования k=781, что равносильно 19-и разрядной разрешающей способности. При отсутствии пространственно-временного разделения каналов, реально может быть достигнута лишь 16-и разрядная точность (AD7664, табл.2.2). Модификация классического метода измерения с пространственно-временным разделением каналов [57] позволила получить следующие результаты:
1. Распространить область применения классического компенсационного метода на измерение переменных напряжений;
2. В зависимости от параметров сигнала и производительности технических средств выбирать наименьшую погрешность измерений модификацией алгоритма.
3. Появилась возможность реализации его внутрисистемно на элементах с аппаратной избыточностью.
3. ТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ СИСТЕМ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ
Возможны три способа реализации алгоритмов СТД (рис.3.1):
- аппаратный;
- программный;
- аппаратно-программный.
Аппаратная реализация подразумевает использование разнообразных функциональных блоков: регистров, сумматоров, шифраторов и дешифраторов, счетчиков, линий задержек, устройств памяти, умножителей, сдвигателей, логических элементов, интегральных и больших интегральных схем, программируемых логических матриц и т. п. Совокупность функциональных блоков и связей между ними определяет реализуемый алгоритм.

Рис.3.1.
Программная реализация написана на языке программирования, соответствующем конкретному блоку в алгоритме. Так, для персонального компьютера это будет любой из языков высоко уровня (Pascal, C++, Java и др.), а для микропроцессорного комплекта или цифрового процессора - соответствующий язык ассемблера.
Все команды, составляющие программу, должны быть представлены в виде, понятном процессору и непосредственно им воспринимаемом. Команды предъявляются процессору как комбинация нулей и единиц; такие комбинации составляют машинный язык. Поэтому создаются специальные средства, облегчающие подготовку и отладку программ для процессора, когда каждой машинной команде или группе команд ставится в соответствие понятный человеку символ на основе мнемоники (правил и приемов, облегчающих запоминание) так, чтобы символ отражал смысловое содержание команды.
К достоинствам программной реализации относятся:
- неизменная структура системы при различных алгоритмах и областях применения:
- хорошая гибкость, позволяющая достаточно легко изменять алгоритмы работы системы за счет коррекции или изменения программы;
- существенное ускорение, облегчение и удешевление проектирования, изготовления и отладки системы, поскольку вместо прибора разрабатывается программа.
Недостатком программной реализации является относительно низкое быстродействие по причине последовательного выполнения операций программы в одном процессоре: как бы ни увеличивали скорость выполнения команд, она будет оставаться ниже производительности соответствующего устройства, реализованного аппаратно. Отсюда вытекает задача обеспечения реального времени, которая подразумевает два обстоятельства:
- время обработки одного отсчета или группы отсчетов сигнала tб должно быть меньше допустимого времени задержки tдоп : to6 < tuon; контроль за выполнением этого условия осуществляется как при написании программы, так и при ее отладке;
- цикл работы программы и моменты поступления отсчетов входного сигнала х(п) должны быть строго согласованы по времени, т. е. начало обработки очередного отсчета х(п) должно совпадать или следовать за поступлением этого отсчета; с другой стороны, результат обработки у(п) должен быть выведен согласно темпу работы внешнего устройства, который не обязан совпадать с темпом поступления отсчетов х(п), что видно на примере вокодеров.
Аппаратно-программная реализация подразумевает, что часть функций системы ЦОС выполняется аппаратно (аналого-цифровое и цифро-аналоговое преобразования, умножение, умножение с накоплением, прием/передача данных и др.), а другая часть функций выполняется программно. Пример аппаратно-программной реализации показан на рис.3.2, где к процессору, работающему по заданной программе, подключены:
- аналого-цифровой (АЦП) и цифро-аналоговый (ЦАП) преобразователи;
- модули внешней памяти, хранящие программы, разнообразные константы и таблицы функций (например, sin и cos), что позволяет заменять длительное их вычисление быстрым обращением к памяти (такая реализация является прекрасным примером обмена скорости вычисления на дополнительное оборудование, т. е. действует закон, согласно которому невозможно получить абсолютный выигрыш: любой выигрыш требует платы за себя);
Пример реализации микропроцессорной СТД
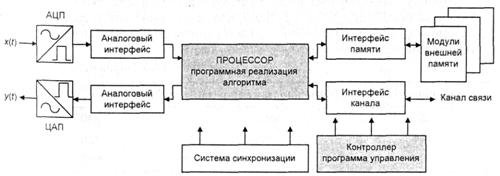 |
Рис.3.2.
- интерфейс — это специальные вспомогательные схемы, обеспечивающие согласование сигналов на стыках с модулями внешней памяти, АЦП, ЦАП, каналом связи (регистры стыковки также могут быть отнесены к интерфейсу);
- система синхронизации, обеспечивающая временное согласование элементов системы.
Аппаратно-программная реализация сочетает положительные свойства аппаратной и программной реализаций. Разумное сочетание аппаратных и программных средств позволяет снизить требования к вычислительным возможностям элементной базы и упростить реализацию систем ЦОС в целом, для отладки которой требуются специальные средства отладки. Средства отладки создаются под конкретную элементную базу и по сути являются инструментом разработки многочисленных систем на этой элементной базе.
3.1 Техническая реализация систем диагностики с программной и аппаратной избыточностью
Развитие современных средств микроэлектроники позволило использовать в системах технической диагностики принципиально новые технические решения. К их числу относятся реконфигурируемые пользователем цифровые и аналоговые системы [65] на кристалле производства фирм ATMEL, ALTERA и Lattice Semiconductor. Новые технические средства эффективны только при реализации с их помощью специально разработанных, ориентированных под эти технические средства методов измерений и программных алгоритмов. Их особенностями являются:
- возможность параллельного во времени выполнения алгоритмических потоков;
- возможность разделения функций на программно и аппаратно реализуемые;
- возможность пространственно-временного разделения аналоговых каналов.
Аппаратная избыточность, реализуемая на базе «систем на кристалле», дает следующие преимущества по сравнению с системами построенными без таковой по традиционным принципам:
- улучшение критерия «стоимость-эффективность»;
- возможность изменения аппаратной части схемы программным путем при реализации различных методов измерения;
- инвариантность по способу обмена информационными потоками с периферийными устройствами;
- возможность поддержки различных интерфейсов без изменения структуры системы;
- удаленное конфигурирование и администрирование как программной, так и аппаратной частей СТД;
- изменение функциональных возможностей системы без выполнения монтажных работ;
- адаптация параметров аналоговых трактов под изменяющиеся, вследствие развития технических средств, требования к решению задач диагностирования.
Перечисленные возможности могут быть реализованы как в мобильных, так и в стационарных системах технической диагностики и контроля СЖАТ [4].
Для построения мобильных СТД необходимо выполнение следующих требований:
- автономность и экономичность;
- поддержка максимального количества внешних интерфейсов для передачи информации;
- малые габариты и вес;
- возможность работы под управлением систем более высокого уровня.
Отвечающие этим требованиям комплексы могут работать и на стационарных объектах ж. д. транспорта.
Ядром мобильной СТД является реконфигурируемая пользователем «система на кристалле» FPSLIC. Она обеспечивает возможность получать такие параметры измерительного тракта, которые позволяют эффективно решать задачу диагностики конкретного объекта. Переконфигурируемая цифровая часть позволяет объединить несколько измерительных каналов в единый программно-аппаратный комплекс. Также она позволяет реализовать модель диагностируемого устройства на программно-аппаратном уровне и, тем самым, снизить требования к каналам передачи данных при высокой достоверности результатов определения технического состояния устройств ЖАТ.
Программная реконфигурация аппаратных средств позволяет изменять параметры интерфейса связи [66], внутренние сигналы управления и алгоритмы не только на программном, но и на аппаратном уровне (рис.3.3).
Программная модель цифровой ПЛИС
Рис.3.3
Процесс реконфигурирования может происходить по команде извне, когда внешний контроллер, выполняющий функции интерфейсного модуля, принимает данные, содержащие конфигурационную информацию и осуществляет перепрограммирование микросхемы. Этот режим предпочтительно использовать в случаях, когда система на базе FPSLIC является подчиненной и управляется внешними устройствами.
Наличие такого режима позволяет изменять конфигурацию FPGA в системе алгоритмически по ходу выполнения рабочей программы микроконтроллера. Это повышает надежность системы и ее быстродействие, дает возможность реконфигурации, если того потребует состояние объекта диагноза или пользователь. Часть функций диагностики может выполняться без участия центрального процессорного ядра FPSLIC, что снижает требования к надежности аппаратного [67] и программного обеспечения. К выходам FPSLIC применяется оптоэлектронная гальваническая развязка, что требуется для безопасного подключения к устройствам СЦБ.
Система контроля параметров устройств СЦБ на базе переносного измерительного комплекса (рис.3.4) работает следующим образом. Входной аналоговый сигнал с объекта диагноза через ССЗ поступает на аналоговую матрицу ispPAC с программно изменяемой внутренней схемой и параметрами входящих в нее узлов (рис.3.5, 3.6). Она содержит в себе активные элементы и позволяет получить заданные параметры измерительного тракта (АЧХ, ФЧХ, суммирование сигналов входных цепей и т. д.) без изменения принципиальных схем и перепайки [68]. Различные конфигурации ее внутренних элементов позволяют реализовать прямой, компенсационный и итерационный методы измерения.
С одного из выходов ispPAC аналоговый сигнал подается на программируемый усилитель (УПКУ), а затем в АЦП. Цифровой эквивалент результата измерений поступает в FPSLIC, куда собирается информация и со всех остальных каналов. Идентификация состояния объекта диагноза в случае распределенной сети передачи данных [69,70] осуществляется либо в пункте концентрации информации, либо в переносном ПК типа Notebook, находящемся на незначительном удалении (до 100м) от ОД. Возможно подключение измерительного контроллера к компьютеру при помощи интерфейса USB [71].
Важной особенностью является то, что система диагностики получает данные непрерывно в реальном масштабе времени и, вместе с этим, ведет их обработку и передачу по радиоканалу [72]. Это принципиальное отличие от систем сбора и обработки информации, которые работают по принципу «измерил пакет - обработал - передал». Основной их недостаток заключается в том, что ЭВМ получает данные обрывками, в промежутках между которыми состояние проверяемого объекта оценивается лишь вероятностными показателями. Данный факт недопустим при отслеживании быстро протекающих переходных процессов, имеющих место в тональных рельсовых цепях.
 |
Функциональная схема ПЛИСа
Рис.3.5
Функциональная схема реконфигурируемого пользователем
аналогового модуля
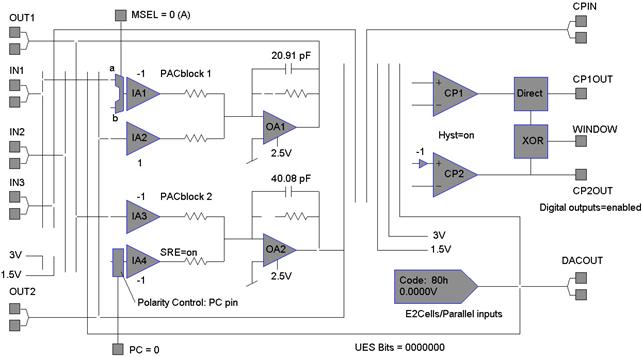
Рис.3.6
Примером реализации принципов построения СТД является АСК «Тест». Она предназначена для выполнения тестовой диагностики релейной и электронной аппаратуры ж. д. автоматики и телемеханики [2,73]. Основными требованиями, предъявляемыми к стационарным системам диагностики следующие:
- количество выходных каналов от 44 до 200;
- изменение числа каналов без изменения структуры самой системы;
- возможность каждого канала оказывать как управляющее воздействие на объект диагноза, так и выполнять измерительные процедуры;
- удаленный мониторинг и конфигурирование системы.
Структурная схема одного из каналов представлена на рис.3.7. В целях самодиагностики и обеспечения высокой точности измерений при выходе из нормы параметров передаточных характеристик измерительных каналов, введен тракт обратной связи. Это позволяет определить неисправность в измерительном канале и многократно сократить погрешность измерений при искажениях его передаточной характеристики вследствие нагрева, изменениях параметров элементов и т. п. Таким образом, значительно снижаются требования ко всему измерительному тракту и, как следствие, его стоимость при тех же показателях точности канала в целом.
Функциональная схема измерительно-управляющего канала АСК «Тест»

Управление объектом происходит по цепочке FPSLIC-ЦАП-СС-УМ-(выходной узел)-объект диагноза. Для процесса измерений: (выходной узел)-мультиплексор - ПУ-АЦП-FPSLIC. Назначение матрицы FPSLIC здесь такое же, как и в переносном варианте. Входной узел обеспечивает защиту цепей от импульсных помех, возникающих вследствие переходных процессов в обмотках проверяемых реле, а также согласования уровней сигналов.
Результаты тестовых воздействий затем передаются в ЭВМ, где в реальном масштабе времени идет определение состояния ОД. Подобный режим работы осуществлен при помощи нескольких параллельно протекающих алгоритмических потоков [74,75]. Работать программа может под управлением многозадачных операционных систем Windows9x/Me, Windows2000 или WindowsXP. При разработке программного обеспечения одним из главных требований являлась возможность добавления математических моделей новых устройств без модернизации основной программы. Это позволяет на местах обновлять программное обеспечение с целью его усовершенствования и добавления новых устройств СЦБ в перечень проверяемых. Таким образом, вносится полезное дополнение в существующие способы организации обслуживания устройств СЦБ [76,77,78].
3.2 Построение измерительных трактов СТД с использованием внутренних шин ЭВМ
Измерительный тракт ИТ предназначен для измерения напряжения с установленной точностью. Разработанная схема измерительного тракта имеет следующие параметры:
· диапазон измерения ±220В;
· максимальная точность измерения 0.04 В
· скорость измерения 45 мкс при обычной точности и 90 мкс - при повышенной;
· количество каналов 16;
· использованная шина - ISA;
· интерфейс-WINDOWS-95-98, NT.
Структурная схема измерительного тракта состоит из следующих блоков: многоканальный ключ (оптронные ключи), многоканальный коммутатор, операционный усилитель, аналого-цифровой преобразователь (АЦП), буферный регистр, два запоминающих регистра, дешифратор адреса. Структурная схема приведена на рис.3.8.
Структурная схема измерительного тракта

Рис.3.8
Дешифратор адреса предназначен для преобразования входного натурального двоичного кода адреса порта в унитарный и выработки сигнала выбора устройства. Оптронный ключ предназначен для выбора делителя напряжения, это нужно для того чтобы предохранить микросхемы от сгорания. Операционный усилитель служит для согласования рабочих диапазонов напряжений многоканального коммутатора и АЦП. Многоканальный коммутатор необходим для выбора одного из n каналов измерения. АЦП служит для генерации выходного цифрового кода соответствующего аналоговому напряжению поступающему на вход. Буферный регистр предназначен для формирования цифровых сигналов и усиления импульсов по току. Регистры предназначены для кратковременного хранения и преобразования двоичных чисел.
Алгоритм выполнения программы
Рис. 3.9
Дальнейшая обработка двоичного кода в ЭВМ осуществляется методом спектрального анализа на основе дискретного преобразования Фурье. Спектром временной зависимости (функции) y(t) называется совокупность ее гармонических составляющих (гармоник), образующих ряд Фурье.
3.3 Использование микроконтроллеров в СТД
Применение микроконтроллеров позволяет разрабатывать недорогие высокофункциональные системы с низким энергопотреблением для задач небольшой сложности.
Рассмотрим архитектуры наиболее распространенных семейств микроконтроллеров производства фирм Atmel и Analog Devices.
АТmega103, ATmega603L, ATmegal03L - 8-разрядные микроконтроллеры
с Flash памятью емкостью 64/128Кбайт
Особенности:
• Использована AVR расширенная RISC архитектура
• Мощный набор из 121 команды, большинство которых выполняется за один машинный цикл
• Емкость внутрисистемно программируемой Flash памяти 64 Кбайт (АТmega103/L) и 128 Кбайт (АТmega103), 1000 циклов стирания/записи
• SPI интерфейс внутрисистемного программирования
• Емкость встроенной EEPROM 2 Кбайт (АТmega103/L) и 4 Кбайт (АТmega103), 100000 циклов стирания/записи
• Встроенная RAM емкостью 4 Кбайт
• 32 8-разрядных регистра общего назначения, набор регистров управления периферией
• 32 программируемых линии I/O, 8 линий выхода, 8 линий входа
• Программируемые последовательные UART и SPI интерфейсы
• Диапазон напряжений питания от 2,7 В до 6,0 В;
• Диапазон тактовых частот от 0 до 4 МГц
• Производительность до 6 MIPS при частоте 6 МГц
• Встроенная система реального времени с отдельным генератором
• Два 8-разрядных таймера/счетчика с отдельным предделителем и ШИМ
• 16-разрядный таймер/счетчик с отдельным предделителем, режимами захвата/ сравнения и двойным ШИМ с разрядностью 8, 9 или 10 разрядов
• Программируемый сторожевой таймер с встроенным генератором
• Встроенный аналоговый компаратор
• 8-канальный 10-разрядный аналого-цифровой преобразователь
• Режимы энергосбережения Idle, Power Save и Power Down
• Программная установка тактовой частоты
• Программная блокировка защиты программных средств
Функциональная схема микроконтроллера ATMega103
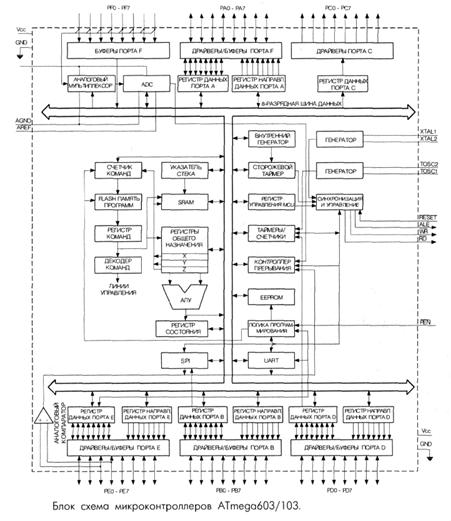
Рис.3.10.
Среди большой номенклатуры устройств, выпускаемых передовыми производителями, необходимо выделить ИМС ADuC812 фирмы ANALOG DEVICES. Фирма AD представляет ADuC812 как однокристальную систему сбора данных и управления, которая включает прецизионный 12-разрядный АЦП, два 12-разрядных ЦАП и ядро микроконтроллера с архитектурой MCS-51. Микроконтроллер имеет следующие основные характеристики: 12- разрядный 8-канальный АЦП со скоростью выборки 200 kSPS и каналом прямого доступа к памяти; два 12 – разрядных ЦАП с потенциальными выходами; 8-разрядное ядро микроконтроллера с архитектурой MCS-51 c тактовой частотой 16 МГц; 8Кб flash-памяти; 640 кб внутренней flash-памяти данных типа;
последовательные порты UART, I2C, SPI; монитор напряжения питания, сторожевой таймер, встроенный источник опорного напряжения.
Функциональная схема микроконтроллера ADuC812
Рис.3.11
Использование интерфейсных модулей, поддерживающих современные протоколы обмена информацией (USB, сетевые протоколы TCP/IP, беспроводная связь) позволяют строить на их базе распределенные системы контроля и управления с возможностью удаленного переконфигурирования.
Рис.3.12
В системах сбора данных необходимо иметь оптронную развязку с линейной характеристикой. На рис.3.13 приведена схема с использованием изоляционного аналого-цифрового преобразователя HCPL-7860.
Рис.3.12
4. Обзор существующих систем диагностики и контроля параметров устройств железнодорожной автоматики, телемеханики и связи
Для сбора, обработки и отображения информации о состоянии устройств СЦБ потребуются новые технические средства - системы автоматического контроля и СТД, которые обеспечат непрерывный контроль и прогнозирование параметров, что позволит предупредить аварийные ситуации.
Средства ТД установленные в РТУ позволяют, по сравнению с существующими, повысить достоверность и качество оценки работоспособности устройств СЦБ, решают задачи определения состояния элементов и узлов, режимов их работы, а следовательно, обеспечивают значительное сокращение затрат на восстановление систем автоматики и телемеханики.
Одним из таких примеров являются различные модификации системы АСК «Тест» [2], которая позволяет диагностировать широкий спектр различной аппаратуры СЦБ, проходящей через РТУ.
Предприятие «Комаг-Б» разработало комбинированный прибор для измерения сигналов рельсовых цепей (ПК-РЦ). Он предназначен для определения параметров электрических сигналов при техническом обслуживании и ремонте систем ЖАТ. Прибор позволяет измерять напряжение и силу тока, его спектральные составляющие. Результаты измерений могут быть переданы в компьютер через последовательные порты RS-485 или RS-232. Хотя прибор и позволяет измерять спектральные составляющие сигнала, с его помощью невозможно определять временные параметры кодовых импульсов.
Микропроцессорная система контроля состояния станционных рельсовых цепей (СКСМ) предназначена для контроля целостности и свободности рельсового пути и формирования кодовых комбинаций АЛСН.
Конструктивно аппаратура СКСМ выполнена в виде одного металлического блока, в котором размещены передатчик и приёмник сигналов рельсовых цепей. Один приёмопередатчик СКСМ может обрабатывать сигналы до восьми рельсовых цепей. Аппаратура СКСМ выполнена с учётом обеспечения требований безопасности движения поездов.
Система контроля технического состояния рельсовых цепей (СКТ-СРЦ), разработанная по заказу Целинной железной дороги, предназначена для непрерывного контроля исправности рельсовых цепей. Она позволяет проводить измерения напряжения на путевой обмотке фазочувствительного реле, а также величины сдвига фаз между напряжениями на путевом и местном элементах реле ДСШ-13. При этом осуществляется архивирование данных о напряжении и фазе на релейных концах станционных рельсовых цепей, определение вида неисправности при наступлении отказа или предотказного состояния РЦ.
В случае, если участок железной дороги оборудован системами диспетчерской централизации (ДЦ) или диспетчерского контроля (ДК) с различными модификациями [20,21], то их возможности также могут использоваться для технической диагностики устройств СЦБ. Информация, собираемая этими системами при помощи различных датчиков, по каналам связи поступает на пульт центрального поста и отображается на табло, по которому поездной диспетчер получает информацию о поездной обстановке на участке. Система ДК «ГТСС-СЕКТОР», помимо обеспечения абонентов сети информацией о поездных передвижениях, позволяет передавать измеренные значения напряжений тональной частоты по физической линии на скорости до 2400 бит/с.
Аппаратура систем ДЦ Минск и ДЦ Дон выполнены на основе интегральных микросхем и реализуют традиционные функции приема и передачи сигналов ТУ-ТС. Для расширения функциональных возможностей ДЦ Минск была дополнена устройствами индикации номеров поездов, выполненными на основе специализированных БИС.
Увеличение объема передаваемой дискретной информации позволило наряду с данными о занятости рельсовых цепей и положении стрелок, передавать диагностическую информацию, которая поступает от систем контроля технического состояния. Так, система АПК-ДК позволяет проводить аналоговые измерения, собирать информацию для диагностирования и прогноза аналоговых параметров устройств, определять ресурс приборов и вести автоматизированный учет отказов.
Для дистанционного контроля, а также анализа информации о работе аппаратуры сигнальных точек автоблокировки, предназначена микропроцессорная система СДКМ. Она может работать не только на существующих, но и на проектируемых системах автоблокировки. Для нужд диагностики СДКМ обеспечивает формирование и передачу на станцию информации о поездном положении на перегоне и об исправности устройств СЦБ. При этом осуществляется автоматическое сохранение информации обо всех изменениях, происходящих на сигнальной точке автоблокировки.
При разработке микропроцессорных систем автоблокировки (АБ), на этапе проектирования сразу закладывается возможность самодиагностирования. Так, системы автоблокировки АБ-ЧКЕ, КЭБ-2, АБ-УЕ помимо выполнения своих традиционных функций, имеют возможность передачи информации на станцию для диагностики аппаратуры сигнальных точек. Особое внимание уделяется надежности программного обеспечения [22].
Хотя выше перечисленные системы ДК, ДЦ, РЦ и др. и позволяют собирать определенный объем диагностической информации, задачи диагностирования и контроля в них решаются не в полной мере [23]. Имеется возможность лишь измерения некоторых параметров сигналов через определенные интервалы времени, которые достаточно велики из-за ограниченной пропускной способности каналов связи. Поэтому значительно снижена вероятность выявления отказов, вызывающих кратковременные сбои, а также перемежающихся отказов. К тому же, решение о состоянии объекта ЖАТ не происходит автоматически (кроме простейших), что повышает роль человеческого фактора.
Для оказания помощи электромеханикам СЦБ в отыскании неисправностей в устройствах ЖАТ созданы различные переносные приборы и пробники. Интерес представляют цифровые приборы, построенные на основе микроконтроллеров и переносных ПЭВМ. Устройства на микроконтроллерах (ИВП-АЛСН, ПК-РЦ) позволяют помимо измерения уровней напряжений и токов, определять спектральные составляющие сигналов, декодировать сигналы АЛС и отображать их временные параметры.
Определение асимметрии постоянного тягового тока осуществляется при помощи метода одновременного измерения тяговых токов в полуобмотках дроссель – трансформатора электроизмерительными клещами.
Поскольку измерение параметров кодовых посылок в рельсовых цепях обычными универсальными ампервольтомметрами затруднено, для этих целей созданы приборы на базе однокристальных микроконтроллеров. Например, измеритель параметров кодов ИПК-1131, предназначен для отображения на матричном жидкокристаллическом экране формы кодовых сигналов АЛСН и измерения их параметров. Он позволяет выполнять следующее:
· измерять сигналы на свободных контактах реле и трансмиттерах;
· на элементах устройств АЛСН, питаемых постоянным и переменным (25, 50, Гц) током контактным способом;
· измерять параметры импульсов переменного тока частотой 25, 50 Гц, протекающих по рельсам индуктивным способом (с помощью выносного датчика).
В некоторых системах контроля обеспечена возможность удаленной связи с пунктом концентрации информации, где полученные данные обрабатываются. В их числе - регистратор питающих напряжений РПН-1321. Он предназначен для непрерывного контроля параметров напряжения основной и резервной системы электроснабжения постов ЭЦ. Прибор обеспечивает измерение значения напряжения каждой фазы, сравнение значения напряжения с нижним и верхним допустимыми порогами и фиксацию в памяти прибора времени выхода напряжений из нормы.
Специалистами Уральского отделения ВНИИЖТа при активном участии Свердловской ж. д. была разработана аппаратура бесконтактного автоматического контроля стрелки АБАКС [24]. С 2000г аппаратура внедряется на сети железных дорог в рамках выполнения Программы безопасности движения поездов.
Система АБАКС выполняет контроль прилегания остряков и некоторых других параметров. Состоит из напольного и постового оборудования. Контроль осуществляется путем измерения длительности затухающих гармонических колебаний в открытом колебательном контуре, образованном специальным датчиком и остряком стрелки. Система подключается к посту ЭЦ кабелем, при этом на каждые 10 стрелок требуется 12 жил кабеля СЦБ.
Для непрерывного контроля технического состояния станционных устройств СЦБ, специалистами НПП «Югпромавтоматизация» разработан комплекс автоматического диагностирования и контроля ИВК-АДК [25]. Он оснащен программой обработки поступающей информации, регистрации сбоев и отказов в работе технических средств и определения их причин, протоколирования и обмена информацией с системой верхнего уровня.
ИВК-АДК автоматизирует ввод-вывод, предварительную обработку, хранение, синхронный контроль и измерение величин токов и напряжений по совокупности подключенных сигналов, анализирует параметры дискретных и аналоговых сигналов устройств в режиме реального времени. Система позволяет автоматизировать анализ измерения параметров устройств СЦБ, автоматически диагностировать их работу, выявлять «нештатные» ситуации, возникающие при сбоях и отказах.
Анализ зарубежного опыта в развитии систем ЖАТ показал более высокий уровень их развития. В России системы СЦБ разрабатывались и совершенствовались с использованием в них ненадежных и требующих периодического технического обслуживания элементов. Все технические решения были направлены, как правило, на устранение лишь последствий отказов (сокращение времени задержки поездов). Это привело к значительному усложнению и удорожанию устройств, в том числе и из-за их высокой материалоемкости и трудоемкости. Примерами могут служить разработки рельсовых цепей, работающих при низких сопротивлениях балласта, различные сложные системы диагностики для простых устройств АБ, значительное увеличение числа реле на одну стрелку в системах ЭЦ, сложные устройства электропитания и множество регламентирующих инструкций. Отсутствуют встроенные системы самодиагностики и стандартные интерфейсы сопряжения.
Так, шведские системы АБ, примером которой может служить адаптированная к российским железным дорогам компьютерная централизация Ebilock-950, имеют встроенную возможность контроля внутренних функциональных узлов на программном и аппаратном уровнях и автоматической переконфигурации в случае возникновения неисправностей [26]. Диагностические операции начинаются в момент включения системы и предлагаются в фоновом режиме в процессе ее работы. Такое решение исключает возможность появления систематической ошибки.
Для удаленного диагностирования и мониторинга железнодорожных систем в США создана единая сеть сбора данных [27]. Она представляет собой распределенную структуру, ведущую обмен данными по сети Интернет. В объект контроля (ОК) встраивается модуль сбора информации (МСИ), который собирает, накапливает и обрабатывает информацию с ОК (локомотив, вагон, устройство автоматики, и т. д.). При помощи программы-посредника [28], запущенной на переносном компьютере, он по Интернет связывается с сайтом производителя данного устройства по протоколу TCP/IP. Физическое соединение МСИ с переносной ПЭВМ осуществляется по специально разработанному для использования на железных дорогах интерфейсу IEEE 1473-L [29]. Каждый МСИ может быть удаленно переконфигурирован для изменения программного обеспечения и модели обработки поступающих в него данных. Результаты, полученные МСИ, сравниваются с данными, представленными на сайте производителя диагностируемого оборудования, которые поступают на переносную ПЭВМ в архиве ZIP [30]. Информация от сложных ОД проходит предварительную обработку методами на основе теории искусственных нейронных сетей. Вместе с данными о состоянии ОД, на сайт производителя передаются уникальный идентификатор устройства (UIC), серийный номер, марка производителя, название модели ОД, текстовое описание, параметры конфигурирования, версия программного и аппаратного обеспечения [31]. Последовательность посылок при конфигурировании регламентируется стандартом [32], который описан в [30]. Местоположение подвижных ОД определяется Глобальной спутниковой навигационной системой GPS.
