
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ОГЛАВЛЕНИЕ
Стр.
ВВЕДЕНИЕ ……………................................................................................. 4
1. РАБОЧАЯ ПРОГРАММА УЧЕБНОЙ ДИСЦИПЛИНЫ
«КОСМИЧЕСКАЯ НАВИГАЦИЯ» …………………………………………... 5
1.1. Содержание разделов дисциплины …………………………………. 5
1.2. Экзаменационные вопросы..................................................................... 8
2. ЛАБОРАТОРНО-ПРАКТИЧЕСКИЕ РАБОТЫ………………………... 10
2.1. Лабораторно-практическая работа № 1. Определение координат
базовой станции и их ковариационных матриц в общеземной системе
WGS-84 ………………………………………………………………………… 10
2.2. Лабораторно-практическая работа № 2. Учет движений
тектонических плит при обработке ГНСС наблюдений................................. 14
2.3. Лабораторно-практическая работа № 3. Решение базовой линии
по наблюдениям приемников разных компаний и с использованием
точных эфемерид и координат начального пункта …………………….…. 18
2.4. Лабораторно-практическая работа № 4. Компоненты базовых
линий и их ковариационные матрицы ………………………………………. 24
2.5. Лабораторно-практическая работа № 5. Трансформирование
координат при использовании GPS-технологий в геодезии ………………. 29
БИБЛИОГРАФИЧЕСКИЙ СПИСОК......................................................... 36
ВВЕДЕНИЕ
Методические указания предназначены для выполнения лабораторно-практических работ по 2-й части дисциплины «Космическая навигация», изучаемой студентами специальности «Космическая геодезия» на 5-ом курсе. В ходе выполнения лабораторно-практических работ студенты должны научиться делать обработку высокоточных фазовых измерений, выполненных геодезическими приемниками, работающими по сигналам глобальных навигационных спутниковых систем (ГНСС). В настоящие методические указания вошли вопросы по вычислению координат базовой станции в одной из общеземных систем отсчета (WGS-84, ITRF), подготовке файлов наблюдений, в частности, преобразование файлов наблюдений из формата компании-изготовителя в универсальный формат RINEX, вычислению компонент базовых линий с возможным улучшением качества решения, посредством использования продуктов деятельности Международной ГНСС службы (МГС). На каждой из стадий обработки рассматриваются вопросы независимого контроля и оценки точности результатов.
Вычислительные работы выполняются с помощью программы MathCAD. Для этого каждый студент разрабатывает по готовым формулам алгоритм, набирает его и получает результат. Обработка спутниковых измерений производится в программе Trimble Geomatics Ofiice (TGO) [5]. Предполагается, что основные операции в этой программе, такие как создание проекта обработки, импорт данных, настройка программы на решение базовых линий и непосредственно выполнение решения, были освоены студентами на предыдущих курсах. В некоторых заданиях будут использоваться другие вспомогательные программы, разработанные компаниями-изготовителями спутниковой аппаратуры или составленные в академии.
Все работы являются индивидуальными, то есть каждый студент выполняет и защищает свой вариант. По каждому заданию студент представляет оформленный отчет, который должен содержать:
- титульный лист с указанием названия учебного заведения, номера лабораторно-практической работы, ее названия и номера варианта, группы и фамилии студента, а также ведущего преподавателя;
- исходные данные к работе в соответствии с номером варианта;
- описание разделов работы с рабочими формулами, реализованным алгоритмом, полученными результатами и пояснениями;
- выводы по работе или заключение.
Работа оформляется в текстовом редакторе Word, вычислительной программе MathCAD (или Exel), или вручную. После выполнения лабораторно-практической работы студент сдает ее на проверку преподавателю, и после исправления замечаний защищает ее.
1. РАБОЧАЯ ПРОГРАММА УЧЕБНОЙ ДИСЦИПЛИНЫ
«КОСМИЧЕСКАЯ НАВИГАЦИЯ»
1.1.Содержание разделов дисциплины
1. ВВЕДЕНИЕ. Предмет и задачи космической навигации. Исторический очерк. Роль и значение космической навигации в решении основных геодезических задач. Понятие о методах космической навигации и их реализации. Принципы построения космических навигационных систем. Навигационные параметры. Наиболее важные показатели космических навигационных систем. Определение координат навигационных ориентиров. Методы и алгоритмы решения навигационной задачи.
2. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ КОСМИЧЕСКОЙ НАВИГАЦИИ. Общие принципы функционирования глобальных спутниковых радио-навигационных систем ГЛОНАСС и GPS NAVSTAR. Подсистемы контроля и управления, орбитальные группировки, потребители. Координатно-измерительные комплексы и системы связи, обеспечивающие работу глобальных спутниковых радионавигационных систем. Оборудование навигационных спутников ГЛОНАСС и GPS NAVSTAR. Оснащение потребителей навигационной информации.
Навигационные радиосигналы ГЛОНАСС и GPS NAVSTAR. Частотный план. Структура навигационных сигналов. Использование широкополосных шумоподобных радиосигналов для передачи информации. Помехоустойчивость. Псевдослучайные последовательности. Принципы формирования дальномерных кодов и навигационной информации. Модуляция радионавигационного сигнала. Спектры транслируемых радиосигналов. Характеристики радиолиний передачи данных.
Навигационные сообщения ГЛОНАСС и GPS NAVSTAR. Способы описания движения навигационных ИСЗ на относительно коротких интервалах времени. Состав и структура кадров навигационных данных. Оперативная эфемеридная информация и альманах. Алгоритмы вычисления положения и скорости спутника по данным альманаха. Алгоритмы вычисления положения и скорости спутника по оперативной эфемеридной информации.
3. КОСМИЧЕСКАЯ РАДИОНАВИГАЦИЯ. Радиотехнические принципы измерения навигационных параметров. Аппаратура потребителей. Обобщенная функциональная схема аппаратуры потребителей. Антенно-фидерные устройства. Приемные устройства. Основные функции приемного устройства. Опорный генератор. Коррелятор. Первичная обработка сигналов. Организация поиска и обнаружения сигнала на фоне помех. Схема поиска сигналов по задержке и частоте. Восстановление несущих частот. Выделение дальномерного кода в аппаратуре потребителей. Схемы слежения за задержкой дальномерного кода и несущей частотой сигнала. Принципы цифровой обработки сигналов. Вторичная обработка сигналов. Выделение цифровой информации. Оценка навигационных параметров сигнала. Псевдолальность, псевдоскорость, допплеровское смещение частоты и фаза несущей как навигационные параметры. Навигационный вычислитель. Основные функции навигационного вычислителя. Структура математического обеспечения навигационного вычислителя. Алгоритмы расчета целеуказаний для поиска сигналов навигационных ИСЗ и выбора оптимального рабочего «созвездия». Алгоритмы решения навигационной задачи по минимально необходимому набору измерений. Типы спутниковых приемников потребителей. Одноканальные приемники. Мультиплексные приемники. Многоканальные приемники. Кодовые и фазовые приемники. Использование фазовых измерений для определения пространственной ориентации объекта. Использование приемников СРНС для синхронизации шкал времени удаленных пунктов. Особенности построения приемной аппаратуры для совместного использования систем GPS и ГЛОНАСС.
Основные источники ошибок измерений и их влияние на определение координат потребителей. Ошибки эфемерид навигационных ИСЗ. Уход бортовых часов НИСЗ. Ошибки, обусловленные распространением радиосигналов. Влияние ионосферы. Влияние тропосферы. Многолучевое распространение радиосигналов. Ошибки измерений в аппаратуре потребителя. Уход часов приемника. Смещение фазового центра приемной антенны. Шумы приемника. Умышленное занижение точности измерений. Селективный доступ.
4. СИСТЕМЫ ОТСЧЕТА, ПРИМЕНЯЕМЫЕ В КОСМИЧЕСКОЙ НАВИГАЦИИ. Классификация координатных систем. Взаимосвязь систем координат. Принципы преобразования пространственных координат. Реализация фундаментальной системы координат. Воспроизведение фундаментальной системы координат для эпохи наблюдений. Координатная отсчетная основа ITRF. Государственная референцная система СК-95. Системы и средства измерения и хранения времени.
5. ГЕОДЕЗИЧЕСКОЕ ИСПОЛЬЗОВАНИЕ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ РАДИО-НАВИГАЦИОННЫХ СИСТЕМ ГЛОНАСС И GPS NAVSTAR. Абсолютные методы определения координат потребителей по избыточным наборам результатов измерений. Геометрический фактор ослабления точности определения координат потребителя. Дифференциальные и относительные методы определения координат потребителя. Принципиальные основы дифференциального метода. Корректирующая информация. Ошибки дифференциальных координатных определений. Основные разновидности относительных методов и схемы их реализации. Ошибки относительных координатных определений.
Составление технического и рабочего проектов развития геодезической сети при совместном использовании наблюдений спутников систем ГЛОНАСС и GPS NAVSTAR. Планирование и организация полевых измерений.
Стандартные Форматы обмена спутниковыми данными RINEX, SP3, RTCM, CMR, SINEX.
Обработка результатов наблюдений спутников ГЛОНАСС и GPS. Классификация и математическая модель ошибок наблюдений. Понятие динамической системы и вектора состояния. Идентификация и оценка состояния динамических систем. Динамическая фильтрация последовательности наблюдений. Фильтр Калмана. Предварительная обработка результатов измерений. Обработка кодовых измерений. Сглаживание кодовых измерений по фазовым. Обработка фазовых измерений. Методы разрешения фазовой неоднозначности.
Принципы уравнивания геодезических сетей, построенных при использовании наблюдений спутников систем ГЛОНАСС и GPS NAVSTAR.
Структура ПМО обработки спутниковых измерений.
6. ПРИНЦИПЫ ФУНКЦИОНИРОВАНИЯ НАЗЕМНЫХ СЕТЕЙ НЕПРЕРЫВНО ДЕЙСТВУЮЩИХ РЕФЕРЕНЦНЫХ СПУТНИКОВЫХ СТАНЦИЙ. Понятие об активных сетях непрерывно действующих референцных спутниковых станций. Разновидности активных сетей референцных спутниковых станций. Структурные схемы функционирования этих сетей. Состав аппаратно-программного обеспечения референцных спутниковых станций и центра управления системой станций. Организация взаимодействия потребителей спутниковой информации с сетями непрерывно действующих референцных спутниковых станций. Централизованная и распределенная обработка спутниковой информации. Концепция виртуальной базовой станции. Современное состояние, перспективы развития и повышения точности наземных сетей непрерывно действующих референцных спутниковых станций.
7. ОПРЕДЕЛЕНИЕ ОРБИТ КОСМИЧЕСКИХ АППАРАТОВ. Основы теории определения орбит ИСЗ. Фундаментальное уравнение орбитальных методов космической геодезии. Состав траекторных измерений. Дальности, измеренные лазерными дальномерами, псевдодальности и псевдоскорости, измеренные радиотехнической аппаратурой, топоцентрические прямые восхождения и склонения, полученные фотографической и фототелевизионной аппаратурой, радиальные скорости, полученные доплеровской аппаратурой. Ковариационные матрицы непосредственных измерений.
Линеаризация фундаментального уравнения орбитальных методов. Структура матриц, входящих в линеаризированное фундаментальное уравнение. Матрица изохронных производных, её свойства и методы вычисления её элементов. Метод вариации начальных условий движения ИСЗ. Матрица изохронных производных как интегральная нормированная матрица. Уравнения поправок при определении орбит и совместном определении орбит и координат пунктов наблюдения. Орбитальный метод космической геодезии. Особенности вычисления свободных членов уравнений поправок при определении орбит.
Методы определения предварительной орбиты. Классические методы Гаусса и Лапласа. Область их применения при определении орбит ИСЗ. Новые методы определения предварительной орбиты ИСЗ. Метод Ласкоди итераций по истинной аномалии, метод итераций по фокальному параметру орбиты. Метод Эскобала для смешанного состава измерений. Метод Херрика вычисления координат и составляющих скорости по их значениям в начальную эпоху.
Дифференциальное уточнение предварительных орбит ИСЗ. Ньютоновский итерационный процесс. Применение в каждой итерации метода наименьших квадратов. Модифицированный и не модифицированный ньютоновский итерационный процесс. Скорость и область сходимости для каждого из них. Теоремы Канторовича об области и скорости сходимости. Оценка точности определения начальных условий движения по результатам дифференциального уточнения орбиты.
Реализация орбитального метода космической геодезии. Орбитальный метод совместного уточнения начальных условий движения ИСЗ и координат пунктов наблюдения. Упрощенный орбитальный метод.
8. АСТРОНОМИЧЕСКАЯ, ИНЕРЦИАЛЬНАЯ, АСТРОИНЕРЦИАЛЬНАЯ И МОРСКАЯ НАВИГАЦИЯ. Основные принципы астроинерциальной навигации. Состав аппаратуры, используемой в астроинерциальной навигации. Элементы и устройства астроинерциальной навигации.
Оптические и радиотехнические приборы для ориентации и навигации. Построение местной вертикали. Датчики горизонта. Солнечные датчики. Оптические приборы ориентации по звездам. Автоматическое распознавание звезд. Определение ориентации космического аппарата по изображениям участков звездного неба и поверхности небесного тела.
Системы инерциальной навигации. Гироскопы и хранение направлений. Акселерометры и измерение ускорений космического аппарата. Гравитационные градиентометры. Стабилизированные платформы. Принципиальная схема стабилизации платформы в заданной системе координат. Контур Шулера. Обработка ускорений, полученных при помощи акселерометров. Учет влияния гравитационного поля планеты. Определение координат и скорости космического аппарата по данным гироскопов и акселерометров. Математическая модель инерциальной навигации.
Комплексные системы астроинерциальной навигации.
Приборы для морской навигации и гидрографических съемок. Эхолоты, сонары.
1.2. Экзаменационные вопросы
1. Предмет и задачи космической навигации. Краткий исторический очерк. Роль и значение космической навигации в решении основных геодезических задач. Понятие о методах космической навигации и их реализации.
2. Системы отсчета. Классификация систем отсчета, их компоненты. Отсчетные основы ICRF и ITRF. Характеристика отсчетных основ, их назначение, реализации. Модель движения тектонических плит NNR NUVEL-1A. Учет геодинамических факторов в процессе обработки ГНСС измерений.
3. Общеземные системы отсчета WGS-84 и ПЗ-90. Государственные системы координат СК-42 и СК-95. Понятие точности системы координат (системы отсчета), системы геодезических параметров и исходной геодезической даты. Топоцентрическая система координат E, N, U.
4. Методы преобразований координат: переходы от геодезических к прямогольным и обратно, от одной системы к другой (методы Молоденского и Гельмерта).
5. Виды наблюдений в спутниковой навигации. Псевдодальность, ее уравнение. Уравнение фазы несущей. Компоненты уравнений, их характеристики, математические модели для геометрической дальности, тропосферной и ионосферной рефракции, поправок часов. Сравнительная характеристика псевдодальности и фазы. Фазовые разности, их свойства. Псевдодальность, сглаженная по фазе.
6. Методы ГНСС позиционирования. Классификация методов, их особенности, характеристики точности.
7. Абсолютный метод. Определение координат абсолютным методом по псевдодальностям. Уравнение наблюдений, анализ конфигурации. Решение уравнений линейной засечки. Оценка точности. Коэффициенты потери точности DOP. Определение координат абсолютным методом по фазе несущей.
8. Дифференциальный метод. Концепция метода, виды дифкоррекции, способы передачи корректирующих поправок. Локальный, широкозонный и глобальный методы. Системы SBAS. Дифференциальный сервис.
9. Относительный метод ГНСС. Концепция метода. Способы статических и кинематических наблюдений. Инициализация кинематики. Математические модели для относительного метода по одинарным, двойным и тройным разностям. Использование комбинаций фазы.
10. Сетевые методы ГНСС технологий. Виды сетей: глобальные, региональные, локальные. Международная ГНСС служба, ее назначение, продукты деятельности МГС. Активная опорная станция, ее компоненты. Метод множественных опорных станций. Сущность метода. Достоинства и недостатки. Метод площадных поправок и метод виртуальной опорной станции.
11. Обработка спутниковых измерений. Методы и средства обработки. Решение отдельных базовых линий, виды решений. Методы разрешения неоднозначностей. Методы восстановления потерь счета циклов непрерывной фазы несущей.
12. Уравнивание спутниковой сети. Цели уравнивания. Две концепции уравнивания. Функциональные модели уравнивания сети из базовых линий. Стохастические модели измерений. Свободное, минимально ограниченное и ограниченное уравнивание. Оценка состоятельности уравнивания, критерий c2. Способы выявления ошибок в сети.
13. Определение орбит космических аппаратов. Фундаментальное уравнение орбитальных методов космической геодезии. Линеаризация фундаментального уравнения орбитальных методов. Вычисление свободных членов уравнений поправок при определении орбит. Дифференциальное уточнение предварительных орбит ИСЗ.
14. Астрономическая, инерциальная, астроинерциальная и морская навигация. Основные принципы астроинерциальной навигации. Состав аппаратуры, используемой в астроинерциальной навигации. Контур Шулера. Обработка ускорений, полученных при помощи акселерометров. Комплексные системы астроинерциальной навигации. Приборы для морской навигации и гидрографических съемок. Эхолоты, сонары.
2. ЛАБОРАТОРНО-ПРАКТИЧЕСКИЕ РАБОТЫ
2.1. Лабораторно-практическая работа № 1.
Определение координат базовой станции и их ковариационных матриц в общеземной системе WGS-84
Общие теоретические сведения. В практике геодезических работ в России геодезист для выполнения работ по построению геодезической сети в качестве исходных получает координаты в референцной системе СК-95 (или СК-41) в проекции Гаусса-Крюгера, а отметки в Балтийской системе нормальных высот БСВ-78. Для обработки ГНСС наблюдений необходимо иметь геодезические или прямоугольные координаты в общеземных системах отсчета WGS-84, ПЗ-90 (или ITRF) [2].
Переход от референцной системы СК-1 к общеземной системе СК-2 можно представить в виде схемы (рис. 1) [1, 3]. Следует иметь в виду, что поскольку современные общеземные системы отсчета в отличие от рефернцных систем имеют временную эволюцию, то получаемые по этой схеме координаты СК-2 будут относиться к эпохе определения параметров перехода.
Рис. 1. Схема координатных преобразований
Бюджет времени: 6 часов аудиторных занятий и 6 - самостоятельно.
Цель работы: изучение методов трансформирования координат, применяемых в космической навигации и спутниковой геодезии при обработке высокоточных измерений.
Задача работы: преобразовать координаты пунктов из референцной системы СК-95 в общеземную систему отсчета с оценкой точности.
Исходные данные. Координаты пункта в системе СК-95 в проекции Гаусса-Крюгера генерируются в соответствии с номером варианта N: x= 6 155 342.140+100м ×(N-1), y= 14 648 200.м ×(N-1), нормальная высота Hg = 215.311 м-10 м×(N-1);
Высота квазигеоида z95=-23.159 м+0.10м×(N-1);
Средние квадратические погрешности (СКП) координат: mx=my=0.020 м, СКП нормальной высоты mH=0.05 м.
Параметры преобразования (параметры Гельмерта): вектор малого вращения w = (wx, wy, wz )т= (0.0", 0.350", 0.660")T, вектор переноса начала (компоненты даются в метрах) Т = (25.000, -141.000, -90.000)Т; несовпадение масштабов между системами не учитывать.
Параметры эллипсоида СК-95 (эллипсоида Красовского): a= 6378245.000 м, e2= 0., параметры эллипсоида WGS-84: a=6378137.000 м, e2 =0..
Средние квадратические погрешности параметров Гельмерта: ![]() ,
, ![]() м.
м.
Методика выполнения работы
1. Преобразовать плоские координаты x, y в проекции Гаусса-Крюгера в геодезические координаты B, L на эллипсоиде СК-95 B95, L95, используя программу xy_blh. exe. Запустите программу и следуйте её указаниям.
Для работы программы требуется подготовить файл исходных данных с расширением. dat. Для этого нужно использовать файл шаблона XXXX. dat, который переименовывается и редактируется редакторами FAR или Notepad. Новое название содержит инициалы студента (первые три символа) и номер версии файла. Для исходных данных версия 1, для результата счета – версия 2. Содержание файла имеет следующий вид:
NOV1
.770
Здесь: NOV1 – возможное название проекта, а 1111 –номер точки из четырех символов. Далее следуют плоские координаты x, y. Разделитель между числами – пробел, вещественные числа содержат точку.
2. Вычислить геодезическую высоту H95, используя нормальную высоту Hg и высоту геоида над эллипсоидом ((аномалию высоты) z:
![]() . (1)
. (1)
3. Преобразовать геодезические координаты B95, L95, H95 системы СК-95 в B84, L84, H84 системы WGS-84 по методу Молоденского.
 , (2)
, (2)
где
 (3)
(3)
 (4)
(4)
 (5)
(5)
![]() . (6)
. (6)
4. Вычислить прямоугольные координаты X, Y, Z по геодезическим координатам B, L, H в системе СК-95:
 ,
,  . (7)
. (7)
5. Преобразовать прямоугольные координаты X, Y, Z системы СК-95 в прямоугольные X, Y, Z системы WGS-84, используя преобразование по Гельмерту:
 . (8)
. (8)
6. Преобразовать координаты X, Y, Z системы WGS-84, в геодезические этой же системы B, L, H.
 , (9)
, (9)
 ,
,
 . rp=(X2+Y2)½. (10)
. rp=(X2+Y2)½. (10)
Здесь rp – радиус параллели, i – номер приближения, которые продолжаются до тех пор, пока
 . (11)
. (11)
Значение критерия сходимости e определяется точностью прямоугольных координат. После определения геодезической широты находится высота над эллипсоидом:
![]() . (12)
. (12)
7. Проконтролировать правильность преобразований по методам Молоденского и Гельмерта. Для этого находятся расхождения между геодезическими координатами B84, L84, H84, полученными по методу Молоденского из геодезических координат B95, L95, H95 и прямоугольных координат X84, Y84, Z84. Подобным образом находятся расхождения в прямоугольных координатах X84, Y84, Z84, полученных по методу Гельмерта из прямоугольных координат X95, Y95, Z95 и геодезических координат B84, L84, H84.
8. Сделать оценку точности координат в системе WGS-84:
 ,
,  , (13)
, (13)
где K84, K95 и KP –ковариационные матрицы соответственно для координат в системах WGS84, СК-95 и для параметров Гельмерта. Ковариационная матрица для элементов преобразования KP считается диагональной, состоящей из дисперсий (квадратов СКП) соответствующих величин, при этом угловые элементы должны задаваться в радианной мере. Ковариационная матрица K95 для положения пункта в референцной системе вычисляется через погрешности плоских координат mx, my и геодезической высоты mH:
 , (14)
, (14)
где
 ,
, ![]() . (15)
. (15)
Контрольные вопросы
1. Какая система отсчета используется для навигационного сообщения GPS? (для навигационного сообщения ГЛОНАСС?).
2. Что такое «параметры Гельмерта»?
3. Каким образом можно вычислить параметры Гельмерта?
4. Какая информация необходима для перехода от эллипсоидальных высот к нормальным?
5. Какие параметры необходимы для преобразования геодезических координат в прямоугольные?
6. На какую из геодезических координат не влияет масштаб при переходе от одной системы к другой?
7. Какой необходимо установить критерий сходимости для широты, если прямоугольные координаты даны с точностью до миллиметров?
8. Какая организация поддерживает систему отсчета ПЗ-90 (WGS-84, ITRF)?
2.2. Лабораторно-практическая работа № 2.
Учет движений тектонических плит при обработке ГНСС наблюдений
Общие теоретические сведения. При обработке наблюдений длинных базовых линий (порядка 100 км и более) взаимное положение пунктов может изменяться на величину, значительно превышающую погрешность измерений. Учет изменений в положениях пунктов производится в системах отсчета с временной эволюцией ITRS, практическая реализация которых называется ITRF (International Terrestrial Reference Frame, Международная земная отсчетная основа). Известно несколько реализаций ITRF, последняя из них ITRF-2008. Временная эволюция учитывается также в системах WGS-84(G1150) и некоторых других. В настоящее время отсчетные основы ITRF являются наиболее точными реализациями общеземных систем [http://www. iers. org/]. Системы ITRS удовлетворяют следующим требованиям:
- начало систем находится в центре масс всей Земли, включая океаны и атмосферу,
- единицей длины является метр (SI), определенный в локальной земной системе в смысле релятивистской теории гравитации,
- ориентировка осей задается по данным Международного Бюро Времени на эпоху 1984.0,
- временная эволюция ориентировки осей такова, что она не имеет остаточной вращательной скорости в плоскости горизонта по отношению к земной коре.
Вектор положения пункта ![]() на поверхности твердой Земли в эпоху t в системе ITRS дается как
на поверхности твердой Земли в эпоху t в системе ITRS дается как
 , (16)
, (16)
где ![]() - положение в эпоху
- положение в эпоху![]() ,
, ![]() - скорость в эпоху
- скорость в эпоху ![]() , которая может достигать 10 см/год
, которая может достигать 10 см/год  - подлежащие учету поправки за высокочастотные эффекты, такие как лунно-солнечные приливы в твердой Земле, деформации из-за океанических приливных нагрузок, атмосферные нагрузки и др. Скорость
- подлежащие учету поправки за высокочастотные эффекты, такие как лунно-солнечные приливы в твердой Земле, деформации из-за океанических приливных нагрузок, атмосферные нагрузки и др. Скорость ![]() в ITRF может либо определяться из наблюдений, либо вычисляться в соответствии с моделью NNR NUVEL1A движения тектонической плиты
в ITRF может либо определяться из наблюдений, либо вычисляться в соответствии с моделью NNR NUVEL1A движения тектонической плиты ![]() по скоростям wx, wy, wz вращения плиты в декартовых координатах (табл. 1) в соответствии с принадлежностью пункта к той или иной тектонической плите (рис. 2):
по скоростям wx, wy, wz вращения плиты в декартовых координатах (табл. 1) в соответствии с принадлежностью пункта к той или иной тектонической плите (рис. 2):
 . (17)
. (17)
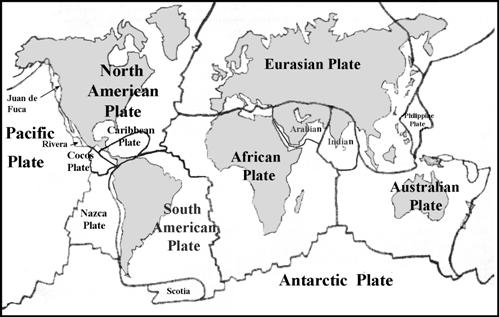
Рис. 2. Карта тектонических плит
Таблица 1.
Скорости вращения для модели кинематики тектонических плит
NNR NUVEL1A
Название плиты | wx, | wy | wz |
Pacific | -0.001510 | 0.004840 | -0.009970 |
Cocos | -0.010425 | -0.021605 | 0.010925 |
Nazca | -0.001532 | -0.008577 | 0.009609 |
Caribbean | -0.000178 | -0.003385 | 0.001581 |
South America | -0.001038 | -0.001515 | -0.000870 |
Antarctica | -0.000821 | -0.001701 | 0.003706 |
India | 0.006670 | 0.000040 | 0.006790 |
Australia | 0.007839 | 0.005124 | 0.006282 |
Africa | 0.000891 | -0.003099 | 0.003922 |
Arabia | 0.006685 | -0.000521 | 0.006760 |
Eurasia | -0.000981 | -0.002395 | 0.003153 |
North America | 0.000258 | -0.003599 | -0.000153 |
Juan de Fuca | 0.005200 | 0.008610 | -0.005820 |
Philippine | 0.010090 | -0.007160 | -0.009670 |
Rivera | -0.009390 | -0.030960 | 0.012050 |
Scotia | -0.000410 | -0.002660 | -0.001270 |
Примечание. Угловые скорости wX, wY, wZ даны в радианах за миллион лет.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
