
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 631.3-1/-9
ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ ПРОЦЕССОВ И ПАРАМЕТРОВ РЕЖУЩЕГО АППАРАТА С ГИБКИМ НОЖОМ
– аспирант
ФГОУ ВПО «Новочеркасская государственная мелиоративная академия».
г. Новочеркасск, Россия
Исследован процесс резания растительности режущим аппаратом с гибким ножом. Рабочий орган представлен как система материальных точек, имеющих возможность перемещаться относительно друг друга.
The investigation of the process of plant cutting by cutting tools with a flexible knife. The working organ is represented as a system of material points moving in respect of each other.
В исследованиях процесса резания растительности режущим аппаратом с гибким ножом известно, что траекторией движения любой точки гибкого ножа в горизонтальной плоскости будет являться циклоида, описываемая системой параметрических уравнений
![]() (1)
(1)
где x, y – координаты определяющие положение точки гибкого ножа режущего аппарата в плоскости; t – время, с; r – радиус от центра вращения до искомой точки, м.
Принимая во внимание возможность перемещения точек гибкого ножа в вертикальной плоскости, систему (1) приводим к следующему виду
 (2)
(2)
где z – координата, определяющая положение точки гибкого ножа в вертикальной плоскости; wz – угловая скорость отклонения точки гибкого ножа, с-1 в вертикальной плоскости.
Гибкий рабочий орган представляем как систему материальных точек, имеющих возможность перемещения относительно друг друга. Исходя из этого, при рассмотрении перемещения гибкого рабочего органа в пространстве, координаты, определяющие его положение, находим как проекции точек на соответствующие оси
 (3)
(3)
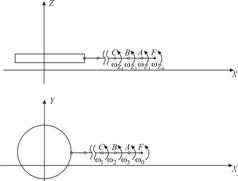
Изменив расчетную схему, представляем рабочий орган не как систему материальных точек, а как жесткие стержни, соединенные между собой в узлах–шарнирах, имеющих три степени свободы (рисунок).
Рассмотрим взаимодействие стержней ножа друг с другом:
расчет траектории движения точки С гибкого рабочего органа выражается системой параметрических уравнений:
 (4)
(4)
Положение точек гибкого ножа в системе координат | расчет траектории движения точки В выражается следующей системой:
расчет траектории движения точки:
|
 (5)
(5) (6)
(6)расчет траектории движения точки F:
 (7)
(7)
После проведенных преобразований получаем описание системы, динамически изменяемой во времени и пространстве
 (8)
(8)
где m – количество стержней ножа; n – порядковый номер стержня ножа от центра крепления.
Полученная система параметрических уравнений описывает закон движения точек гибкого ножа и позволяет определить положение любой точки в любой момент времени в зависимости от количества подвижных элементов. Данная система параметрических уравнений будет являться базовой для создания математической модели взаимодействия стержней между собой в момент резания.
Библиографический список
1. Водяник, моделирование технологических машин [Текст]/ . – Новочеркасск: НГТУ, 19с.
2. Боловнев, процессов взаимодействия со средой рабочих органов дорожно–строительных машин: Учебное пособие./ – М.: Высшая школа, 19с.
