

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Использование мобильных роботов в учебном процессе
Т. А. Лепихин,
Санкт-Петербургский государственный университет, доцент, *****@***com
В статье затрагиваются вопросы использования мобильных роботов в учебном процессе.
Введение
С каждым годом повсюду появляется все большее количество разнообразных механизмов, в частности роботов, которые могут ездить, ползать, ходить и даже летать. Все это множество устройств требует развития существующих и создания новых алгоритмов в области теории управления, теории обработки сигналов, изображений, видео - и аудиопотоков. В связи с этим, и чтобы образование было современным, необходимо внедрять в обучение взаимодействие с подобными технологиями.
Виды мобильных роботов
Существующие мобильные роботы можно разделить на несколько групп по типу движения:
· Антропоморфные роботы (человекоподобные, шагающие на двух ногах);
· Паукообразные роботы (шагающие на нескольких ногах/ конечностях);
· Колесные/гусеничные роботы (от 2 и более колес, от 2 и более гусениц, их комбинации);
· Летающие роботы (вертолето-подобные (n-коптеры), самолето-подобные).
Все подобные устройства могут широко применяться в учебном процессе. Рассмотрим подробнее совокупность задач, которые могут быть поставлены и решены с помощью таких роботов:
1) Теория математического моделирования и теория управления:
· формирование математических моделей движущихся объектов;
· синтез стабилизирующих законов управления;
· решение оптимизационных задач с учетом различных критериев;
· синтез адаптивных законов управления и управления с прогнозом.
2) Системы сбора и обработки данных:
· настройка системы сбора и обработки данных, настройка интерфейсов;
· виды сенсоров. Типы сигналов и особенности их обработки;
· фильтрация шумов.
3) Вопросы теории распознавания визуальной, аудио-, видеоинформации:
· изучение методов распознавания изображений;
· обработка звука и видео.
4) Вопросы реализации алгоритмов в режиме реального времени.
5) Вопросы дистанционного управления мобильной техникой:
· сетевые технологии беспроводной передачи данных;
· разработка приложений под смартфоны для управления мобильной техникой.
6) Вопросы исследования и проектирования цифровых систем.
Используемые в обучении роботы
В настоящее время, в рамках учебного процесса, а также научной деятельности, проводимых на факультете Прикладной математики – процессов управления, уже используются и планируются к использованию следующие мобильные роботы:
1) Антропоморфный робот Futaba RBT-1 «Вася» (рис. 1):
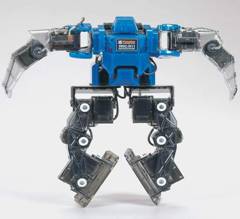
Рис. 1 Антропоморфный робот Futaba RBT-1.
В рамках изучаемых на факультете дисциплин для такого робота ставится задача несколько особо важных задач. Первая и наиболее важная задача – это стабилизация прямолинейного движения робота. Здесь важным условием является то, чтобы робот мог нести на себе датчики измерения расстояния или камеру для распознавания встречаемых препятствий. Сложность решения задачи стабилизации состоит в большом количестве сочленений механизмов андройда. Вторая задача состоит в непосредственном определении встречаемых роботом препятствий и формировании соответствующих алгоритмов реагирования.
2) Мобильная гусеничная платформа (рис. 2):

Рис. 2. Гусеничная платформа DFRobot.
Такой вид робота намного удобнее в плане стабилизации движения, поскольку его движение, по сути, ограничено плоскостью. Следовательно, разумно устанавливать здесь всевозможные датчики, которые чувствительны к ориентации в пространстве, т. е. различного рода камеры и сенсоры измерения расстояния и скорости, а также акселерометры.
3) Мобильный робот «Spy Tank» (рис. 3):

Рис. 3. Мобильный робот Spy Tank.
При работе с мобильным роботом Spy Tank особая роль уделяется задачам обработки видеоинформации, поскольку на платформе присутствует штатная камера, а также вопросам беспроводной передачи данных в силу наличия WiFi-модуля. Следовательно, также можно ставить задачи адаптивного управления и обработки больших объемов поступающей с датчиков информации. Поскольку с помощью модуля беспроводной сети представляется возможным передать данные с датчиков на мощный компьютер, обработать там, сформировав собственно алгоритм управления или его адаптивные части и передать обратно в контроллер робота.
4) Квадрокоптер (рис. 4):

Рис. 4. Квадрокоптер.
5) Гексакоптер (рис. 5) (в состоянии сборки):

Рис. 5. Гексакоптер.
Приведенные два летальных аппарата относятся к классу вертолето-подобных мобильных роботов, именуемых в современной литературе коптерами. Первым приведен квадрокоптер, вторым – гексакоптер.
Основные отличия этих роботов носят конструктивный характер и состоят в количестве ведущих двигателей и их расположении на несущей раме. Кроме приведенных коптеров существует еще целый ряд подобных летающих роботов, а именно: X-коптеры, Y-коптеры и собственно N-коптеры. Квадрокоптер одновременно относится и к Х-коптерам и к N-коптерам. Рассмотрим особенности расположения двигателей. Как в Х-коптерах, так и в Y-коптерах двигатели расположены на краях рамы. Например, в случае Х8-коптера и Y6-коптера двигатели располагаются по краям несущей рамы сверху и снизу, т. е. один винт смотрит вверх, а другой вниз. Рамы так называемых N-коптеров обычно представляют собой правильные N-угольники с четным числом вершин.
Кроме конструктивных отличий такие летательные аппараты имеют отличия в динамике, надежности и управляемости. Так, например, гексакоптер является, несомненно, более надежным аппаратом, ввиду избыточности двигателей, но, тем не менее, сложнее управляемым из-за большей размерности вектора управления. С другой стороны Y6-коптер по надежности опережает гексакоптер, однако его математическая модель несколько сложнее из-за двойной направленности воздушных потоков от двигателей.
Рассмотрим вариант построения системы управления летательным аппаратом на примере вращательного движения гексакоптера.
Пример системы управления летательным аппаратом
Чтобы сформировать систему управления движением летательного аппарата, необходимо определить математическую модель движения управляемого объекта. Остановимся на примере вращательного движения гексакоптера.

Рис. 6. Схема гексакоптера.
Исходная математическая модель носит нелинейный характер. Исследование нелинейностей – это крайне сложная тема, ввиду наличия трудностей, связанных с обеспечением устойчивости таких систем. Поэтому обычно для синтеза закона управления используют математические модели, полученные путем линеаризации нелинейных систем в окрестности положения равновесия.
Рассмотрим линейную систему обыкновенных дифференциальных уравнений, описывающих вращательное движение гексакоптера вида (1):
![]() , (1)
, (1)
где вектор состояний имеет вид ![]() , а вектор управления
, а вектор управления ![]() .
.
Обозначим: 
 ,
, 
 тогда матрицы A, B линейной системы принимают вид:
тогда матрицы A, B линейной системы принимают вид:
 ,
,
Синтез закона управления осуществляется в виде линейоной обратной связи по вектору состояния с учетом заданного командного сигнала в виде (2):
![]() (2)
(2)
где заданный командный ![]() сигнал представляет собой начальное отклонение по углу курса, тангажа и крена на 30°, 30°, -12° соответственно.
сигнал представляет собой начальное отклонение по углу курса, тангажа и крена на 30°, 30°, -12° соответственно.
При формировании закона управления (2) вводится функционал качества желаемого переходного процесса. В качестве такого функционала в данной задаче ввели время переходного процесса, т. е. поставлена задача оптимизации по быстродействию.
В результате решения задачи синтеза регулятора получили следующие переходные процессы, которые представлены на рис. 7, 8, 9.
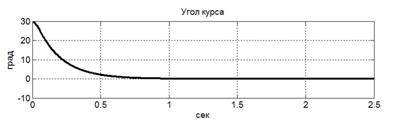
Рис. 7. Перевод гексакоптера по курсу из положения 30° в нулевое положение равновесия.
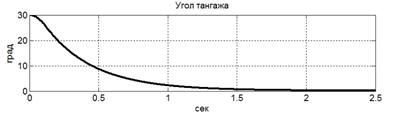
Рис. 8. Перевод гексакоптера по тангажу из положения 30° в нулевое положение равновесия.
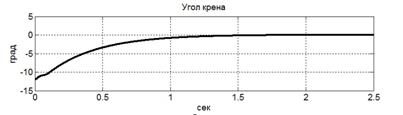
Рис. 9. Перевод гексакоптера по крену из положения -12° в нулевое положение равновесия
Заключение
Все приведенные в статье мобильные роботы внедрены в учебный и научный процесс факультета Прикладной математики – процессов управления Санкт-Петербургского государственного университета в следующих дисциплинах подготовки магистров направления 010300 «Фундаментальные информатика и информационные технологии», учебный плана «Автоматизация научных исследований»:
· Автоматизированные системы сбора и обработки данных.
· Алгоритмические основы распознавания изображений.
· Введение в задачи исследования и проектирования цифровых систем.
· Устойчивость движений дискретных динамических систем.
· Математические методы цифровой обработки сигналов.
.
