


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 62-55
Кемеровский государственный университет, г. Кемерово
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ОГРАНИЧЕНИЙ НА УПРАВЛЯЮЩИЕ ВОЗДЕЙСТВИЯ В ЦИФРОВЫХ СИСТЕМАХ УПРАВЛЕНИЯ
В цифровых системах управления технологическими процессами используются вентили, которые представляют собой нелинейности типа насыщения. Например, любой исполнительный механизм обладает свойством насыщения, когда нижняя граница соответствует закрытию клапана, а верхняя – полному открытому положению. Любая система управления допускает линейное описание до тех пор, пока исполнительный механизм не насыщается.
По мнению авторов [4, 5], наличие нелинейности играет важную роль, когда в системе управления происходят существенные изменения. Например, предполагалось, что система является устойчивой, а на самом деле наблюдаются незатухающие колебания. Или, предполагалось, что переходный процесс занимает короткое время, а в действительности он оказывается существенно более затянутым. При расчете оптимального управления методами принципа максимума Понтрягина и динамического программирования Беллмана [5] возникают проблемы, связанные с учетом ограничений на управление, а именно: 1) сложность подхода; 2) структура алгоритма оптимального управления довольна непроста. Поэтому применяются эвристические методы, которые позволяют учитывать технические возможности исполнительных механизмов. Идея подхода состоит в том, что регулятор должным образом реагирует на насыщение управляющей переменной. Так как рабочий диапазон исполнительного механизма всегда ограничен, для выходного управляющего воздействия uвых задаются ограничения в виде максимального и минимального значений. Если выходное значение регулятора Y превышает заданную величину Yогр. max, то на исполнительное устройство выдается значение Yогр. max, если сигнал меньше заданной величины Yогр. min, то выдается значение Yогр. min.
Насыщение интегратора в составе регулятора может произойти, если выход достиг верхней границы, а регулятор продолжает интегрировать ошибку. В этом случае сигнал на выходе интегратора может принять очень большое значение и потребуется много времени, чтобы вернуть его в нормальное положение. Такая проблема не возникает, если используется дифференциальный алгоритм, так как при постоянном выходе интегрирование автоматически прекращается. Если всё же необходим интегральный алгоритм, то следует проявлять определенную осторожность. Один из возможных способов – это отключать интегратор при насыщении выхода; другой способ состоит в использовании условного интегрирования, в котором интегральная часть регулятора задействована при условии достаточно малой ошибки.
В данной статье проводится исследование основных алгоритмов учета ограничений и их влияния на оптимальное управление в рамках линейной теории при наличии нелинейности типа насыщения. Для достижения поставленной цели решаются следующие задачи:
· изменение шага дискретизации в сторону увеличения на основе принципа эквивалентности дискретных моделей [2, 3];
· использование полинома, учитывающего ограничения на управляющие воздействия, в задачах оптимального управления [1].
Такой полином введен в аппарате полиномиальных уравнений теории оптимального дискретного управления [1]. В качестве критерия оптимальности рассматривается минимальное время переходного процесса (или быстродействия системы управления). Таким образом, имеются два фактора, которые могут быть использованы для учета ограниченности управляющих воздействий: 1) период дискретизации и 2) степень полинома, учитывающий ограниченное управление. Основной задачей данной работы является рассмотрение влияния этих факторов в отдельности и их комбинации при учете ограничений на управляющие воздействия.
Проектирование цифровых систем управления предполагает наличие дискретной модели объекта управления. Поэтому на первом этапе необходимо перейти от непрерывного объекта к дискретной модели в форме передаточной функции. Для этого в работе используется принцип эквивалентности между дискретными моделями одного и того же непрерывного объекта, справедливый для выбора значений шага дискретизации Δt из некоторого интервала (Δtmin, Δtmax). Этот подход основан на аппроксимации непрерывных характеристик объекта с помощью непрерывных дробей по дискретным значениям вход-выходных переменных. При этом шаг дискретизации изменяется в достаточно больших пределах, что позволяет реализовать управление в реальных объектах с учетом наложенных ограничений на величины управляющих воздействий. Представим этот этап в виде следующего алгоритма:
Считаем, что непрерывный объект представлен непрерывной передаточной функцией (НПФ):
 (1)
(1)
где К – коэффициент усиления, ![]() – нули и
– нули и ![]() – полюсы G(s).
– полюсы G(s).
Задаем некоторое входное воздействие x(t) и находим реакцию y(t) объекта по таблице обратного преобразования Лапласа.
Выбираем шаг дискретизации и измеряем значения выходной переменной в моменты времени ![]() , которые являются исходной информацией для решения задачи SP-идентификации [2].
, которые являются исходной информацией для решения задачи SP-идентификации [2].
По данным измерениям вход-выходных переменных составляем матрицу модифицированного алгоритма Висковатова [2]. С появлением в ней нулевой строки получаем конечную правильную С-дробь, которую затем сворачиваем в дробно-рациональную функцию G(z).
На втором этапе с помощью теории полиномиальных уравнений строим по критерию минимального времени регулирования систему управления объектом с дискретной передаточной функцией (ДПФ):
 , (2)
, (2)
где P(q) и Q(q) - заданные полиномы от оператора q = e-sDt, при входном воздействии  где A(q) и B(q) - заданные полиномы от q, причем степени deg A(q) < deg B(q), с учетом ограничений на величины управляющих воздействий
где A(q) и B(q) - заданные полиномы от q, причем степени deg A(q) < deg B(q), с учетом ограничений на величины управляющих воздействий ![]() в замкнутой системе управления.
в замкнутой системе управления.
Желая получить конечный переходный процесс, будем искать программу управления в форме ДПФ вида [1]:
 , (3)
, (3)
где q0(q) и p0(q) – минимальные полиномы, удовлетворяющие полиномиальному уравнению:
P(q)q 0(q) + B(q)p0(q) = A(q). (4)
Так как p-уравнение (4) является правильным (degP(q) + degB(q) > degA(q)), оно имеет единственное минимальное решение с выбором следующих степеней искомых полиномов:
deg q0(q) = deg B(q) – 1, deg p0(q) = deg P(q) – 1. Это решение дает кратчайший переходный процесс длительности [1]
 (5)
(5)
Соответствующее уравнение управления имеет вид: ![]() .
.
Принимая во внимание ограничения ![]() , будем искать такое решение p-уравнения (4), чтобы они выполнялись. Введем произвольный полином x(q) в решение p-уравнения (4):
, будем искать такое решение p-уравнения (4), чтобы они выполнялись. Введем произвольный полином x(q) в решение p-уравнения (4):
q(q) = q0(q) + B(q)x(q), p(q) = p0(q) – P(q)x(q),
(6)
где {q0(q), p0(q)} — минимальное решение, а x(q) — полином, учитывающий ограничения на управляющие воздействия. Соответствующее управление, обеспечивающее получение конечного переходного процесса, имеет вид
 .
.
Для того чтобы управляющие воздействия ui были ограниченными, прежде всего необходимо обеспечить устойчивость процесса u(n), что достигается при условии устойчивости полинома B(q). Величина deg x(q) = m однозначно определяет длительность переходного процесса e(n) = p0(q) – P(q)x(q). При заданной степени m полинома x(q), получим систему линейных неравенств (СЛН) относительно коэффициентов x(q):
 . (7)
. (7)
Для того, чтобы ![]() при
при ![]() , будем использовать разности (приращения)
, будем использовать разности (приращения) ![]() , что позволяет получить конечную систему линейных неравенств (7) и учитывать измерения реальных положений исполнительного механизма.
, что позволяет получить конечную систему линейных неравенств (7) и учитывать измерения реальных положений исполнительного механизма.
Эта система решается методом центра неопределенности [3]. Из области неопределенности xinf £ x £ xsup, каждая точка внутри которой достаточно хорошо описывает результаты измерений, находится точечная оценка значения x, равная ![]() .
.
Длительность переходного процесса определяется выражением:
 (8)
(8)
где n – порядок объекта G(q), m – степень полинома x(q).
По полученным значениям полиномов x(q), q(q), p(q) составляются конечно-разностные уравнения выхода и управления и производится моделирование переходных процессов в замкнутой системе управления.
Рассмотрим разработанную методику на примере колебательного объекта 2-го порядка с НПФ вида (1):
 .
.
Данная функция имеет комплексно-сопряженные полюса ![]() , а переходная характеристика на ступенчатое входное воздействие описывается функцией при
, а переходная характеристика на ступенчатое входное воздействие описывается функцией при ![]() :
:
 .
.
При различных шагах дискретизации с помощью модифицированного метода Висковатова [3] построены соответствующие дискретные модели объекта. Найдены нули и полюса ДПФ объекта и, с помощью взаимно однозначного соответствия ![]() , восстановлены полюса в s-плоскости. С вычислительной погрешностью e = 0,00001 полюса в z-плоскости соответствуют полюсам в s-плоскости при шагах дискретизации
, восстановлены полюса в s-плоскости. С вычислительной погрешностью e = 0,00001 полюса в z-плоскости соответствуют полюсам в s-плоскости при шагах дискретизации ![]() , т. е. получены эквивалентные дискретные модели в указанном интервале шага дискретизации.
, т. е. получены эквивалентные дискретные модели в указанном интервале шага дискретизации.
При построении оптимального управления с наложенными ограничениями на величины управляющих воздействий зададим ограничения r = 1. Для реализации метода полиномиальных уравнений проведем полный анализ влияния шага дискретизации на ограничения управляющих воздействий в пределах интервала шага дискретизации ![]() .
.
Пусть шаг дискретизации Δt = 1 c. Матрица Висковатова примет вид:
1 | 1 | 1 | 1 | 1 |
0,10440 | 0,34030 | 0,61049 | 0,84943 | 1,02336 |
-2,25941 | -4,84732 | -7,13583 | -8,80178 | - |
1,11401 | 2,68904 | 4,24022 | - | - |
-0,26845 | -0,64799 | - | - | - |
~0 | ~0 | - | - | - |
ДПФ моделируемого объекта:
 .
.
Найдем программу оптимального управления. Решив полиномиальное уравнение (4), получим минимальные полиномы: θ(q) =5,18977 и π(q) = 1 + 0,45816q.
В таблице 1 представлены результаты моделирования переходных процессов.
Таблица 1
n | x | e | u | y |
0 | 1 | 1 | 5,18977 | 0 |
1 | 1 | 0,45816 | -7,33752 | 0,54184 |
2 | 1 | 0 | 3,14775 | 1 |
3 | 1 | 0 | 1 | 1 |
Программа оптимального управления, представлена приращением управляющих воздействий Δu(n) = 5,189769 e(n) - 7,337523 e(n-1) + 3,147754∙ ∙e(n-2), которые не удовлетворяют наложенным ограничениям r = 1. Поэтому введем произвольный полином ξ(q) нулевой степени: ξ(q) = ξ0.
Решим СЛН (7) относительно коэффициентов полинома ξ(q):
-6,18977 ≤ ξ0 ≤ -4,18977 |
-3,45404 ≤ ξ0 ≤ -2,62549 |
-2,05296 ≤ ξ0 ≤ -1,06305 |
-1,64872 ≤ ξ0 ≤ 1,648721 |
Полученная система противоречива: ξ0 ≤ ≤-4,18977и ξ0 ≥-2,05296. Поэтому увеличим степень полинома ξ(q) = ξ0 + ξ1q. Соответствующая СЛН примет вид:
-1 ≤ 5,18977 + ξ0 ≤ 1, |
-1 ≤ -7,33752 – 2,41384 ξ0 + ξ1 ≤ 1, |
-1 ≤ 3,14775 + 2,02037 ξ0 – 2,41384 ξ1 ≤ 1, |
-1 ≤ -0,60653 ξ0 +2,02037 ξ1 ≤ 1, |
-1 ≤ -0,60653 ξ1 ≤ 1. |
Данная СЛН также не имеет решения, поэтому еще увеличиваем степень полинома: ξ(q) = ξ0 + ξ1q+ +ξ2q2.
Соответствующая СЛН примет вид:
-6,18977 ≤ ξ0 ≤ -4,18977, |
6,337523 ≤ - 2,41384 ξ0 + ξ1 ≤ 8,33752, |
-4,14775 ≤ 2,02037 ξ0 – 2,41384 ξ1 + ξ2 ≤ -2,14775, |
-1 ≤ -0,60653 ξ0 + 2,02037 ξ1 – 2,41384 ξ2 ≤ 1, |
-1 ≤ -0,60653 ξ1 +2,02037 ξ2 ≤ 1,
-1 ≤ -0,60653 ξ1 ≤ 1.
Область решения искомых коэффициентов полинома ξ(q):
-5,11076 ≤ ξ0 ≤ -4,18977, -3,99905 ≤ ξ1 ≤
≤ -1,80835, -1,64872 ≤ ξ2 ≤ -0,04792.
Найдем точечную оценку полинома ξ(q): ![]() = -4,650264 – 2,903701q – 0,848321q2.
= -4,650264 – 2,903701q – 0,848321q2.
Подставим его в общее уравнение управления, реализованное относительно приращения управляющей переменной:
Δu(n) = 0,53950 e(n) + 0,98379 e(n-1) – 0,08676 e(n-3) – 0,99832 e(n-4) + 0,04726 e(n-5) + 0,514533∙ ∙e(n-6).
В таблице 2 представлены результаты моделирования оптимального управления при наложенных ограничениях на величины управляющих воздействий.
Таблица 2
n | x | e | u | y |
0 | 1 | 1 | 0,53950 | 0 |
1 | 1 | 0,94367 | 0,98379 | 0,05633 |
2 | 1 | 0,71369 | -0,08676 | 0,28631 |
3 | 1 | 0,34491 | -0,99832 | 0,65509 |
4 | 1 | 0,07489 | 0,04726 | 0,92511 |
5 | 1 | 0 | 0,51453 | 1 |
6 | 1 | 0 | 0 | 1 |
Время регулирования (8) составляет tmin = 5 c.
Построим соответствующие графики уравнений управления и выхода системы оптимального управления при наложенных ограничениях на величины управляющих воздействий.
Рисунок 1 - Оптимальное управление при
|ui| ≤ 1 (Δt = 1c, ξ(q) второй степени)
Рисунок 2 - График уравнения выхода системы оптимального управления
Заметим, что на рисунке 1 управляющее воздействие дважды находится в зоне насыщения (на втором и на четвертом отсчете), что является недопустимым при получении устойчивого оптимального управления. Количество реверсов равно двум.
Если увеличиваем степень полинома еще на единицу, т. е. имеем ξ(q) = ξ0 + ξ1q+ ξ2q2+ ξ3q3. Тогда получим следующее управляющее воздействие:
Δu(n) = 0,18415 e(n) + e(n-1) + 0,09084 e(n-3)- – 0,28638 e(n-4) – 0,42144 e(n-5) + 0,10223 e(n-6) + +0,33059 e(n-7).
Рисунок 3 - Оптимальное управление при |ui| ≤ 1
(Δt= 1c, ξ(q) третьей степени)
Заметим, что на рисунке 3 управляющее воздействие входит в зону насыщения на втором временном отсчете, а на четвертом отсчете этот эффект отсутствует, но количество реверсов также равно двум. Следовательно, можно заключить, что с увеличением степени полинома ξ(q) мы избавимся от «вредного» эффекта насыщения, но удлиним переходный процесс в системе, что противоречит критерию быстродействия. Поэтому нужно увеличивать шаг дискретизации.
Аналогичным образом получим ДПФ объекта при шаге дискретизации Δt= 1,5c:
![]() .
.
Найдем программу оптимального управления. Решив полиномиальное уравнение, получим минимальные полиномы: θ(q) =2,64770 и π(q) = = 1 + 0,43691q.
В таблице 3 представлены результаты моделирования переходных процессов.
Таблица 3
n | x | e | u | y |
0 | 1 | 1 | 2,64770 | 0 |
1,5 | 1 | 0,43691 | -2,89838 | 0,56309 |
3 | 1 | 0 | 1,25068 | 1 |
4,5 | 1 | 0 | 1 | 1 |
Программа оптимального управления, представлена приращением управляющих воздействий Δu(n)= 2,64770 e(n) - 2,89838 e(n-1) + 1,25068 e(n-2), которые не удовлетворяют наложенным ограничениям r = 1.
Введем произвольный полином ξ(q) нулевой степени. Решим СЛН относительно коэффициентов полинома ξ(q):
-3,64770 ≤ ξ0 ≤ -1,64770, |
-1,86109 ≤ ξ0 ≤ -0,90629, |
-1,43626 ≤ ξ0 ≤ -0,15997, |
-2,11700 ≤ ξ0 ≤ 2,11700. |
Полученная система противоречива: ξ0 ≤
≤-1,64770 и ξ0 ≥-1,43626. Поэтому увеличим степень полинома ξ(q) = ξ0 + ξ1q. Соответствующая СЛН примет вид:
-3,64770 ≤ ξ0 ≤ -1,64770, |
1,89838 ≤ - 2,09468 ξ0 + ξ1 ≤ 3,89838, |
-2,25068 ≤ 1,56705 ξ0 - 2,09468 ξ1 ≤ ≤ -0,25068, |
-1 ≤ -0,47237 ξ0 +1,56705 ξ1 ≤ 1, |
-1 ≤ -0,47237 ξ1 ≤ 1. |
Область решения искомых коэффициентов полинома ξ(q):
-2,52979 ≤ ξ0 ≤ -1,64770 и -1,40072 ≤ ξ1 ≤
≤ -0,15818.
Отметим, что на рисунке 4 отображена область решения СЛН в виде многоугольника. Из областей неопределенности x0, min £ x0 £ x0, max и x1, min £ x1 £ x1, max, каждая точка внутри которых достаточно хорошо описывает результаты измерений, удовлетворяющих заданным ограничениям на управляющие воздействия, находится точечная оценка значений полинома ξ(q):
![]() .
.
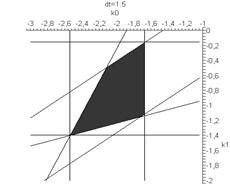
Рисунок 4 - Область решения СЛН полинома ξ(q)
Найдем точечную оценку полинома ξ(q): ![]() = -2,08874 – 0,77945q.
= -2,08874 – 0,77945q.
Подставим найденный полином в общее уравнение управления, реализованное относительно приращения управляющей переменной:
Δu(n) = 0,5895 e(n) + 0,69742 e(n-1) – 0,38978 e(n- -3) – 0,23478 e(n-4) + 0,36818 e(n-5).
В таблице 4 представлены результаты моделирования оптимального управления при наложенных ограничениях на величины управляющих воздействий.
Таблица 4
n | x | e | u | y |
0 | 1 | 1 | 0,55895 | 0 |
1,5 | 1 | 0,88113 | 0,69742 | 0,11887 |
3 | 1 | 0,51044 | -0,38978 | 0,48956 |
4,5 | 1 | 0,12862 | -0,23478 | 0,87138 |
6 | 1 | 0 | 0,36818 | 1 |
7,5 | 1 | 0 | 0 | 1 |
Время регулирования (8) составляет tmin= 6 c.
Построим соответствующие графики уравнений управления и выхода системы оптимального управления при наложенных ограничениях на величины управляющих воздействий.
Рисунок 5 - Ограниченное управление при Δt=1,5c и ξ(q) первой степени
Рисунок 6 - График уравнения выхода оптимальной системы управления
Заметим, что на рисунке 5 управляющее воздействие не входит в зону насыщения, но число реверсов также равно двум, как и при шаге дискретизации Δt = 1с.
Далее проведем те же выкладки с ДПФ объекта при шаге дискретизации Δt = 2с:
![]() .
.
Найдем программу оптимального управления. Решив полиномиальное уравнение, получим минимальные полиномы: θ(q) =1,71825 и π(q) = 1 + + 0,41528q.
В таблице 5 представлены результаты моделирования переходных процессов.
Таблица 5
n | x | e | u | y |
0 | 1 | 1 | 1,71825 | 0 |
2 | 1 | 0,41528 | -1,35036 | 0,58472 |
4 | 1 | 0 | 0,63211 | 1 |
6 | 1 | 0 | 1 | 1 |
Программа оптимального управления, представлена приращением управляющих воздействий: Δu(n) = 1,71825 e(n) – 1, 35036 e(n-1) + 0,63211 e(n-2), которые не удовлетворяют наложенным ограничениям r = 1. Поэтому введем произвольный полином ξ(q) нулевой степени, решив СЛН относительно коэффициентов полинома ξ(q):
-2,71825 ≤ ξ0 ≤ -0,71825, |
-1,31607 ≤ ξ0 ≤ -0,19618, |
-1,41459 ≤ ξ0 ≤ 0,31886, |
-2,71828 ≤ ξ0 ≤ 2,71828. |
Полученная система имеет решение: -1,31607 ≤ ≤ ξ0 ≤ -0,71825. Точечная оценка полинома ξ(q):![]() = -1,01716.
= -1,01716.
Подставим найденный полином в общее уравнение управления, реализованное относительно приращения управляющей переменной:
Δu(n) = 0,70109 e(n) + 0,46618 e(ne(n-e(n-4).
Время регулирования составляет tmin = 6 c.
В таблице 6 представлены результаты моделирования оптимального управления при наложенных ограничениях на величины управляющих воздействий.
Таблица 6
n | x | e | u | y |
0 | 1 | 1 | 0,70109 | 0 |
2 | 1 | 0,76142 | 0,46618 | 0,23858 |
4 | 1 | 0,24583 | -0,54146 | 0,75416 |
6 | 1 | 0 | 0,37419 | 1 |
8 | 1 | 0 | 0 | 1 |
Построим соответствующие графики уравнений управления и выхода системы оптимального управления при наложенных ограничениях на величины управляющих воздействий.
Рисунок 7 - Ограниченное управление при Δt = 2 c и ξ(q) нулевой степени
Рисунок 8 - График уравнения выхода оптимальной системы управления
Заметим, что на рисунке 7 управляющее воздействие не входит в зону насыщения, а число реверсов равно одному.
Представим следующую таблицу исследуемых параметров:
Таблица 7
Управляющее воздействие(Δt, deg ξ) | Кол-во реверсов | Зона насыщения | Время регулирования |
∆u(1; 2) | 2 | ++ | 5 |
∆u(1,5; 1) | 2 | - | 6 |
∆u(2; 0) | 1 | - | 6 |
∆u(2,5; 0) | 1 | - | 7,5 |
∆u(3; 0) | 1 | - | 9 |
∆u(3,5; -) | 1 | - | 7 |
Наилучшим в смысле качества переходных процессов (количества реверсов и отсутствия насыщения исполнительного механизма) является выбор оптимального управления при шаге дискретизации 2 с и нулевой степени полинома, учитывающего наложенные ограничения | ui | ≤ 1. Отметим, что, начиная с Δt = 3,5с, отсутствует необходимость во введении полинома ξ(q), учитывающего заданное ограничение r = 1, поскольку программа оптимального управления удовлетворяет этим ограничениям.
По результатам исследований можно сформулировать следующие выводы:
- увеличение степени полинома, учитывающего ограничения на управление, как правило, приводит к громоздким вычислениям и увеличению времени переходного процесса;
- изменение шага дискретизации приводит к достаточно простой реализации алгоритма построения оптимального регулятора при учете ограничений на управление.
При проектировании цифрового регулятора на основе теории полиномиальных уравнений необходимо придерживаться следующих рекомендаций по степени важности факторов: сначала изменяется шаг дискретизации, а только затем увеличивается степень полинома (максимально до второй степени), учитывающего ограничения на управление. Используя эти факторы необходимо учитывать их влияние не только на время регулирования, но и на ограничения количества реверсов исполнительного механизма. Чем больше реверсов в системе, тем более трудно реализуемой считается программа управления, поскольку чрезмерное количество перемещений исполнительного механизма приводит к его быстрому изнашиванию. В частности, тестовые исследования показали, что уменьшение периода дискретизации и увеличение степени полинома приводит к значительному увеличению числа реверсов.
СПИСОК ЛИТЕРАТУРЫ
1. Волгин дискретное управление динамическими системами / .- М.: Наука, 1986. – 240с.
2. Карташов и исследование аппроксимационных свойств непрерывных дробей при решении задачи структурно-параметрической идентификации динамических объектов / // Препринт № 22 – Барнаул, 1996. – 40с.
3. Карташов оптимальных алгоритмов управления линейными объектами на основе отношения эквивалентности моделей / , // Сборник трудов IV всероссийской конференции «Новые информационные технологии в исследовании сложных структур». - Томск, 2002. – 8 с.
4. Системы управления с ЭВМ/К. Острем, Б. Виттенмарк // М.: Мир, 1987. – 475с.
5. Первозванский теории автоматического управления / - М.: Наука, 1986. – 616с.
