

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МЕТОДЫ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ СОПРЯЖЕНИЙ ТНВД ДИЗЕЛЕЙ
, д. т.н., профессор, , аспирант, , аспирант, , аспирант
Санкт-Петербургский государственный аграрный университет, г. Санкт-Петербург, Россия, ; ; E-mail: *****@***ru
Плунжерная пара.
Цель работы. Определение диагностического параметра для диагностики плунжерных пар динамическим методом.
В качестве диагностического параметра в целях определения технического состояния плунжерных пар предлагается использовать значение площади под кривой интенсивности нагнетания давления на участке активного хода плунжерной пары, где плунжер развивает максимальную скорость перемещения, а значит происходит и резкий рост давления в нагнетательной полости. Известно, что период активного хода плунжера выбирается таким образом, чтобы геометрический конец нагнетания топлива наступал вблизи участка профиля с максимальной скоростью плунжера. Следовательно, на данном участке профиля кулачкового вала осуществляется основное нагнетание топлива, а значит процесс изменения давления нагнетания происходящий на данном участке обладает наибольшей информативностью так как при активном ходе плунжера наполнительные окна и отсечные закрыты и на процесс нагнетания оказывает влияние только наличие утечек связанных с износом плунжерной пары.
Активный ход плунжера определяется на основании развертки, с учетом перемещения плунжера относительно втулки, в зависимости от частоты вращения кулачкового вала ТНВД. Результаты представлены в табл.1
Кинематические характеристики плунжера, при которых топливо нагнетается с заданной интенсивностью и по требуемому закону, обеспечиваются соответствующим профилем кулачкового вала. Для ТНВД с тангенциальным профилем кулачкового вала, перемещение плунжера определяется по формуле [1]:
![]() (1)
(1)
где - ![]() - радиус ролика толкателя;
- радиус ролика толкателя; ![]() - радиусы начальной окружности;
- радиусы начальной окружности; ![]() - угол поворота кулачкового вала ТНВД в рад.
- угол поворота кулачкового вала ТНВД в рад.
Данная формула необходима для вычисления начала активного хода плунжера, так как помогает определить начало перекрытия торцом плунжера впускного окна, а также длительность активного хода плунжера в радианах в зависимости от углового перемещения вала ТНВД.
Таблица1. Зависимость активного хода плунжера от оборотов кулачкового вала насоса
Обороты кулачкового вала насоса | Угол поворота плунжера относительно втулки, | Перемещение плунжера относительно втулки, мм | Активный ход плунжера, мм |
1000 | 0 | 0 | 2 |
900 | 0,07802 | 0,331598 | 2,21534 |
800 | 0,15866 | 0,674285 | 2,43789 |
700 | 0,22261 | 0,946101 | 2,6144 |
600 | 0,25777 | 1,095527 | 2,71144 |
500 | 0,26117 | 1,109965 | 2,72082 |
400 | 0,26286 | 1,117173 | 2,7255 |
300 | 0,27132 | 1,153118 | 2,74884 |
200 | 0,62042 | 2,636791 | 3,71235 |
100 | 0,62641 | 2,662259 | 3,72889 |
Длительность активного хода плунжера во времени определяется на основании данных: длительности активного хода плунжера в радианах, угловой скорости вращения кулачкового вала.
Для фиксирования изменения интенсивности нагнетания используется быстродействующий АЦП (100 кГц, 16-бит), датчик давления ДДЭ-084, маркер синхронизации работы плунжерной пары. Длительность активного хода известна, данные по интенсивности нагнетания выводятся на ПК в координатах давление - время. С помощью аналитической системы MATLAB 6.5 производится обработка данных. Площадь под кривой интенсивности вычисляется методом трапеций. Коэффициент корреляции между утечками за активный ход и площадью соответствующей активному ходу плунжера составил К=0,85.
Вывод. В качестве диагностического параметра предлагается использовать значение площади под кривой интенсивности нагнетания, где предел интегрирования ограничен длительностью активного хода (см. рисунок1).
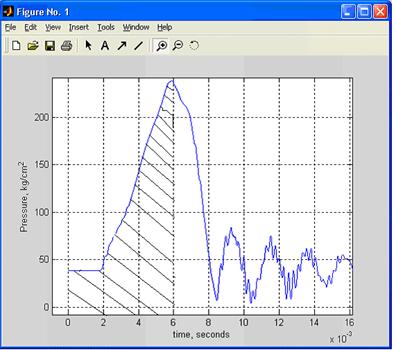
Рис.1 Графическое представление диагностического параметра
Автоматическая муфта опережения впрыскивания топлива(АМОВТ)
Цель работы. Разработка устройства для диагностики АМОВТ
Методика исследований. Для исследования работы АМОВТ и выявления закономерностей штатный метод не пригоден, так как не обеспечивает необходимой точности измерений (не более 0,1 градуса поворота кулачкового вала ТНВД согласно работе ), не позволяет изучить поведение угла опережения во всем диапазоне частот вращения. При увеличении количества получаемых данных требует времени на диагностику одной муфты до 1,5 часов. Это время необходимо непосредственно для измерения и записи данных. Величина времени получена экспериментально при диагностике 9 муфт.
Чтобы изучить поведение угла опережения во всем диапазоне частот - разработано устройство. Оно позволяет: - измерять угол опережения впрыска с точностью до 0,01° поворота кулачкового вала за каждый оборот; измерять частоту вращения за каждый оборот. Структурная схема экспериментальной установки представлена на рис.2
Рис.2. Структурная схема экспериментальной установки.
Работа устройства позволяет в режиме реального времени получать данные об угле опережения впрыска. Важным пунктом в методике является программа обработки данных в системе MATLAB 6.5. Эта система позволяет эффективно управлять устройством с ПК, и представляет широкие возможности.
Рис.3. График изменения угла опережения впрыска от частоты вращения вала
График изменения угла опережения впрыска от частоты вращения вала, полученный при диагностике муфты (1, с использованием электронного устройства представлен на рис.3
Согласно техническим условиям завода изготовителя топливной аппаратуры ЯЗТА АМОВТ типа 807-11 должна изменять угол опережения впрыска на 1°. Согласно кривой, полученной штатным методом муфта исправна. При использовании метода диагностики с использованием электронного устройства наблюдаются колебания угла на всех частотах вращения.
Вывод. Разработанное устройство позволяет с высокой точностью получить характеристику изменения угла опережения от частоты вращения. Что позволяет оценить работу АМОВТ во всем диапазоне частот.
Регулятор ТНВД УТН-5
Цель. Определить коэффициент вязкого трения. Коэффициент вязкого трения определяется во время обработки регулятора восстановительной добавкой. Нужно определить время нанесения восстановительной добавкой. Получить зависимость коэффициента вязкого трения от времени обработки.
Методы исследований. Один из параметров, который определяет техническое состояния регулятора это коэффициент вязкого трения сопряжений регулятора. Выбран параметр коэффициент вязкого трения, так как коэффициент вязкого трения влияет на динамические показатели регулятора.
Исследования[2] коэффициента вязкого трения на моторном стенде дизель-электрического агрегата АД-20М с топливным насосом УТН-5 показывают, что при прочих равных условиях влияние коэффициента вязкого трения на форму переходного процесса при изменении нагрузки заключается в изменении величины колебания угловой скорости дизеля, что приводит к изменению длительности переходного процесса. При снижении коэффициента вязкого трения уменьшится амплитуда колебания угловой скорости и время переходного процесса[2].
Рассмотрены способы авторов , , определения коэффициента вязкого трения. На основании работы оценки энергетических затрат на привод дозирующего органа топливного насоса разработана методика и структурная схема установки смотри рисунок 4. Этот метод выполняется без установки топливного насоса на двигатель.
Рис.4. – Структурная схема экспериментальной установки для определения коэффициента вязкого трения.
Определения коэффициента вязкого трения проводятся при частоте вращения кулачкового вала насоса, соответствующей началу действия регулятора. При этой частоте вращения сила, развиваемая грузами, приблизительно равна силе регуляторной пружины. Для того, чтобы нарушить равновесие, достаточно небольшого усилия F=10-15 Н. Сила сопротивления передвижению рейки и деталей регулятора замерялась экспериментально с помощью динамометра при ходе рейки от начала действия регулятора до отключения подачи топлива. Ход рейки контролировался с помощью специального приспособления рисунок 5. Ход рейки составляет 4 мм. Сила сопротивления передвижению рейки состоит из силы трения в сопряжениях регулятора и остаточной силы регуляторной пружины в одном случае (остаточной силы развиваемой грузами - в другом, в зависимости от направления движения рейки).
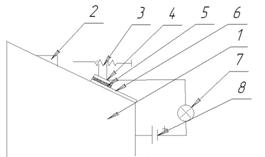
Рис.5. - Схема приспособления для определения положения рейки топливного насоса УТН–5: 1 – корпус регулятора насоса УТН-5; 2 – рейка; 3 – микрометрический винт; 4 – кронштейн; 5 – изолированная вставка; 6 – крепление; 7 – лампочка; 8 – блок питания.
На режиме начала действия регулятора остаточные силы минимальны и в основном сила сопротивления состоит из силы трения сопряжений регулятора. Сила трения ![]() действует противоположно направлению движения рейки топливного насоса, а при неподвижной рейке - противоположно направлению разности указанных сил:
действует противоположно направлению движения рейки топливного насоса, а при неподвижной рейке - противоположно направлению разности указанных сил:
 (2)
(2)
где ![]() восстанавливающая сила пружины;
восстанавливающая сила пружины;  поддерживающая сила грузов;
поддерживающая сила грузов; ![]() сила трения в сопряжениях регулятора.
сила трения в сопряжениях регулятора.
При изменении нагрузки коэффициент вязкого трения влияет на время и форму переходного процесса дизеля[2], поэтому частота вращения электродвигателя, при которой определяется коэффициент вязкого трения, равна свободным колебаниям деталей регулятора, происходящим при переходном процессе n=150 мин-1.
Определено усилие F=10-15 Н, возникающие при передвижении рейки топливного насоса от начала действия регулятора до максимальной частоты холостого хода. Таким образом, электродвигатель должен обладать электрической мощностью 0,4 Вт (с запасом 0,5-1Вт).
Для определения коэффициента вязкого трения ![]() воспользуемся формулой:
воспользуемся формулой:
 (3)
(3)
где ![]() - механическая мощность электродвигателя,
- механическая мощность электродвигателя, ![]() ; T - время одного оборота,
; T - время одного оборота, ![]() ;
; ![]() - радиус кривошипа установки, м.
- радиус кривошипа установки, м.
Для расчета коэффициента вязкого трения нужно определить затрачиваемую механическую мощность. Для этого нужно установить зависимость между потребляемой электрической мощности электродвигателя и затрачиваемой механической мощности.
Для создания(имитации) силы сопротивления на валу электродвигателя используется модернизированная тормозная установка (рисунок 6).
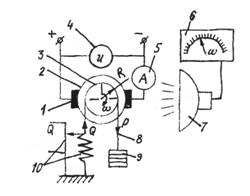
Ри.6. - Схема тормозной установки: 1-электродвигатель; 2-шкив; 3-метка; 4-вольтметр; 5-амперметр; 6-сроботахометр; 7-лампа-вспышка; 8-нить; 9-съемный груз; 10-динамометр.
На тормозной установке с помощью съемных грузов 9 создается разная сила сопротивления, которую контролируем на динамометре 10. Радиус шкива 2 равен радиусу кривошипа R=r=2мм.
В результате получим зависимость мощности электродвигателя от потребляемой мощности при определенной частоте вращения n=150мин-1, необходимую для расчета коэффициента вязкого трения сопряжений регулятора (рисунок. 7) . Для установки выбран электродвигатель постоянного тока 19.3730. Так как легко регулировать частоту вращения электродвигателя. С помощью реостата и блока питания с регулировкой напряжения, путем изменения напряжения. На тормозной установке с помощью с съемных грузов задается сила сопротивления, которая представлена в таблице 1. По формуле (3) подсчитывается механическая мощность.
 (4)
(4)
где ![]() - механическая мощность электродвигателя,
- механическая мощность электродвигателя, ![]() ; T - время одного оборота,
; T - время одного оборота, ![]() ;
;![]() - средняя скорость, м/с;
- средняя скорость, м/с; ![]() - радиус кривошипа установки, м.
- радиус кривошипа установки, м.
На основе полученных данных выведена зависимость(5). Теоретическая зависимость и экспериментальные данные представлены на рисунке 6. С помощью полученной модели можно, по потребляемой электрической мощности позволяет определить механическую мощность.
![]() (5)
(5)
Рис.7. - Зависимость мощности электродвигаот потребляемой электрической мощности при n=150 мин-1.
На основе характеристик электродвига, бесконтактного датчика частоты вращения и схемы установки(рисунок 4) создан аналого-цифровой преобразователь (АЦП). АЦП замеряет одновременно в режиме реального времени: частоту вращения 0-300 мин-1, напряжение 0-12 В, силу тока 0-6,5 А. Данные снимаются с частотой 4Гц.
С помощью программы созданной в МatLab 6.5, загружаемую в компьютер обрабатываются данные. Программа включает в себя: статистический раздел, позволяет перевести потребляемую электрическую мощность в механическую (с помощью экспериментально полученной модели), считает средний коэффициент вязкого трения, позволяет получить колебание механической мощности затрачиваемой электродвигателем на передвижение деталей регулятора.
Вывод. 1. Режим, на котором определяется коэффициент вязкого трения: начало действия регулятора, частота вращения электродвигателя установки при переходном процессе n= 150 минРадиус кривошипа установки равен 2мм. 3. Усилие F=10-15 Н, возникающие при передвижении рейки топливного насоса от начала действия регулятора до максимальной частоты холостого хода. Поэтому электродвигатель должен обладать электрической мощностью 0,4 Вт (с запасом 0,5-1Вт). 4. Характеристики, которыми должен обладать аналого-цифровой преобразователь. АЦП замеряет одновременно в режиме реального времени: частоту вращения 0-300 мин-1, напряжение 0-12 В, силу тока 0-6,5 А. Данные снимаются с частотой 4Гц. 5. Разработана программа для расчета среднего коэффициента вязкого трения, позволяет получить колебание механической мощности затрачиваемой электродвигателем на передвижение деталей регулятора.
Литература
1. Топливная аппаратура автотракторных дизелей. Справочник. Л., 1974
2. Совершенствование систем автоматического регулирования скорости дизель-электрического агрегата с механическим регулятором: Автореф. дис…канд. тех. наук - Харьков.-1982.
