
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
А. И. КЛИМЕНКО, А. А. КРАСНЮК, В. Я. СТЕНИН
Национальный исследовательский ядерный университет «МИФИ»
ФОТОЧУВСТВИТЕЛЬНЫЙ ДАТЧИК ДЛЯ ИДЕНТИФИКАЦИИ ЛЕТУЧИХ АНАЛИТОВ
Описан датчик для идентификации летучих аналитов, его реализация основана на детектировании двумерных сигналов флуоресценции однокристальным КМОП-матричным преобразователем. Разработан вариант конструкции датчика, алгоритмы управления, синхронизации и обработки данных, которые могут являться прототипом для автономных и миниатюрных газосигнализаторов.
Датчик для идентификации летучих аналитов является системой, включающей фоточувствительный преобразователь на КМОП-матрице, устройство сопряжения с ЭВМ, ЭВМ с соответствующим программным обеспечением, источник оптического излучения для возбуждения флуоресценции. Работа датчика основана на измерении динамических параметров флуоресценции, а именно, интегральной интенсивности свечения. Формирование выходных данных основано на регистрации изменения параметров флуоресценции при взаимодействии летучих веществ и сенсорного элемента анализатора. Выходной информацией датчика является зависимость разности интенсивностей изменившейся флуоресценции и исходной флуоресценции (без влияния летучего аналита) от времени анализа. Выходные данные сравниваются с калибровочными, что позволяет идентифицировать летучий аналит и его концентрацию [1]. Калибровочные данные получают предварительно путем проведения экспериментов с различными веществами.
Структурная схема датчика совместно с сенсорным блоком на основе хемочипа и системой подачи летучего аналита приведена на рис. 1.
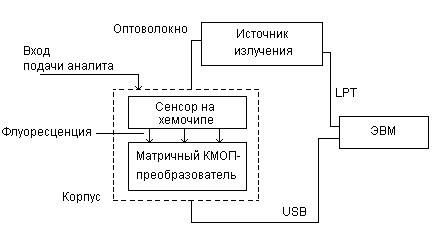
Рис. 1. Структурная схема датчика
В качестве источника подсветки использован лазерный светодиод, который управляется при помощи интерфейса LPT ЭВМ. Светодиод связан через оптоволокно с сенсором на хемочипе. Матричный КМОП-преобразователь и хемочип находятся в одном корпусе на минимально возможном расстоянии. Поскольку импульсная подсветка мощным источником облучения в автономном режиме приводит к ускоренной разрядке аккумулятора ПЭВМ, в разработанном устройстве использован режим импульсной подсветки, синхронизированный с этапом накопления фотозаряда в КМОП-фотоприемнике. Фоточувствительный преобразователь управляется через интерфейс USB с использованием специализированного программного обеспечения. Излучатель может работать в двух режимах – однократном, когда происходит единичная вспышка, и циклическом, когда количество тактов работы излучателя задается пользователем.
В датчике в качестве фотопреобразователя использован КМОП-фотопреобразователь-видеопроцессор Genius Eye 110 с апертурой 1/4". Особенностью видеопроцессора является наличие встроенного 8-разрядного АЦП с регулируемой шкалой, DSP процессора фильтрации помех, буферного ЗУ и цифрового фильтра для межкадровой обработки сигнала. Структурная схема матричного КМОП-фотопреобразователя Genius Eye 110 приведена на рис. 2.
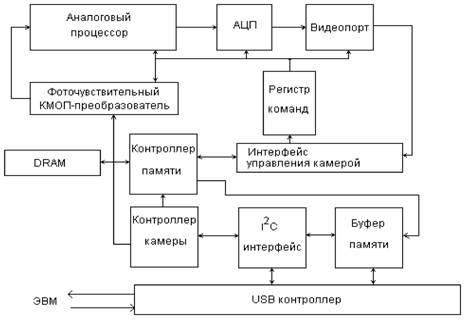
Рис. 2. Структурная схема фоточувствительного преобразователя-видеопроцессора
Однокристальный матричный КМОП фотоприемник обеспечивает регистрацию цветных изображений с разрешением 352×288 точек с перестраиваемой частотой кадров от 1 до 30 кадр/с. Питание, управление, регулировка, и передача данных осуществляется по шине USB. Внутренний интерфейс I2C обеспечивает управление режимами фотоприемника посредством контроллера камеры и записью данных в буферное динамическое ОЗУ DRAM с помощью аналогичного контроллера памяти. Аналоговый сигнал фильтруется и калибруется схемой встроенного аналогового процессора, оцифровывается 8-разрядным АЦП и обрабатывается для буферирования и сжатия в блоке Видеопорт. Обратная связь в канале обработки аналогового сигнала осуществляется через блок регистра команд. Запоминание и трансляция видеоданных в ПЭВМ осуществляется через внутренний встроенный интерфейс управления камерой, буферную память на 5 кадров и встроенный USB контроллер по протоколу USB 1.1/1.0. Дополнительные источники питания, управления и синхронизации не требуются [2].
Алгоритм работы датчика. Управление функциональными режимами датчика и регулировка чувствительности осуществляются программными средствами. Программа управления датчиком в режиме работы совместно с сенсорным устройством, формирующим световой поток флуоресценции, включает три основных этапа.
1. Анализатор не контактирует с летучим аналитом. Светодиод посредством короткого импульсного включения облучает сенсорный элемент, возникает флуоресценция, интенсивность которой фиксирует датчик и передает данные на ЭВМ. ЭВМ вычисляет среднюю интенсивность флуоресценции (опорное значение) по данным 5 кадров [2].
2. Анализатор взаимодействует с летучим аналитом. Светодиод осуществляет облучение сенсорного элемента в заданном режиме. В результате взаимодействия сенсорного элемента и летучего аналита меняется характер и параметры флуоресценции [3]. Информация вводится в ЭВМ, где вычисляется среднее значение интенсивности флуоресценции по 5 кадрам.
3. В ЭВМ вычисляется и фиксируется разность между полученными результатами на втором и первом этапах (с влиянием и без влияния летучего аналита). Эта разность вычисляется периодически и отображается в виде зависимости от времени. Получившаяся в итоге зависимость сравнивается с имеющейся базой данных, и исходя по результатам сравнения идентифицируется летучий аналит и данные о его концентрации.
Поскольку результатом измерений являются разностные значения, изменения характеристик фотоприемника, обусловленные температурными условиями, вычитаются как детерминированные помехи.
Программа обработки данных позволяет выполнять следующие операции:
1) запись среднего интеграла яркости по 5 кадрам для формирования опорного фонового сигнала;
2) вычисление интеграла яркости как по совокупности цветов, так и в каждом отдельном спектральном RGB сигнале и вычитание из полученного значения фонового сигнала;
3) вывод данных в реальном времени (визуализация) в окне программы обработки;
4) запись данных покадрово с разрешением 352×пикселей в кадре, 1 пиксель = = 4 байта) в файл *.brg.
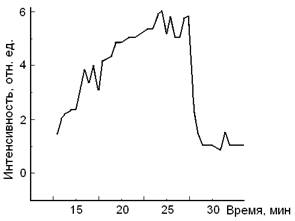
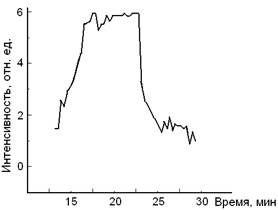
Экспериментальные результаты. Были проведены серии экспериментов, подтверждающие корректную работу различных подсистем датчика, а также эксперименты с идентификацией паров ацетона. Калибровочные данные для датчика сигналов флуоресценции были получены с использованием спектрофотометра Shimadzu UV-3101. На ячейку было нанесено 3 мкл ацетона. Концентрация вещества была 2,37 г/м3. Данные, полученные с использованием разработанного датчика сигналов флуоресценции, и данные, полученные с использованием спектрофотометра, представлены на рис. 3.
а б
Рис. 3. Экспериментальные результаты:
а – данные, полученные с использованием датчика, в эксперименте с парами ацетона,
б – калибровочные данные, полученные с использованием спектрофотометра
Полученные калибровочные данные в эксперименте с парами ацетона (см. рис. 3, б), были введены в память датчика. Затем был произведен эксперимент с использованием датчика сигналов флуоресценции, который успешно идентифицировал пары ацетона (см. рис. 3, а).
Поскольку внешняя подсветка (вспышка) синхронизируется при помощи программных средств, то были проведены серии экспериментов оценки погрешности преобразования, вызываемой такой синхронизацией, а именно оценивались:
- погрешность определения интеграла интенсивности засветки;
- погрешность определения площади засветки в зависимости от относительной интенсивности засветки.
Результаты эксперимента приведены на рис. 4. Погрешность определения интеграла интенсивности засветки (зависимость A) постоянна во всем диапазоне измерений и практически определяется погрешностью преобразования встроенного АЦП. Погрешность определения площади засветки (зависимость S) не превышает 6 % и определяется разностью скоростей интерфейсов LPT и USB и программной загруженностью системы.
На основе матричного КМОП фотопреобразователя со встроенным DSP процессором разработан вариант датчика, алгоритмы управления, синхронизации и обработки данных при использовании датчика в автономных миниатюрных газосигнализаторах и газоанализаторах с использованием оптических хемочипов. Датчик обладает следующими эксплуатационными характеристиками:
- регистрация оптических пространственных сигналов с дискретизацией на 352×288 точек;
- программная перестройка частоты кадров от 1 до 30 кадр/с;
- длительность цикла одного измерения – от 20 мс до 5 мин;
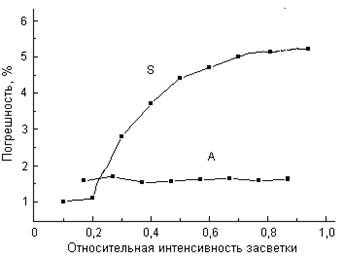
Рис. 4. График зависимостей погрешности от относительной интенсивности засветки:
А – погрешность определения интеграла интенсивности; S – погрешность определения площади засветки
- питание, управление и регистрация данных осуществляется по шине USB;
- выходные данные совместимы с форматами Excel, Math Cad;
- масса датчика (без ПЭВМ) составляет не более 50 г;
- габариты датчика не более 65×20×20 мм;
- допустимое расстояние от датчика до ЭВМ 0,5…40 м.
- величина суммарной относительной погрешности измерения не более 6 %.
СПИСОК ЛИТЕРАТУРЫ
1. Институт проблем химической физики [Электронный ресурс]: Режим доступа: http://www. icp. *****.
2. Patent Genius [Электронный ресурс]: Режим доступа: http://www. .
3. А. Фоточувствительный КМОП преобразователь сигналов флуоресценции для исследования оптических хемочипов // Электроника, микро - и наноэлектроника. Сб. научн. трудов. М.: МИФИ, 2009. С.129.
4. Berlman А.В. Handbook of Fluorescence Spectra of Aromatic Molecules. NY.: Academic Press, 1971.
