

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАМЫШИНСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ (ФИЛИАЛ)
ВОЛГОГРАДСКОГО ГОСУДАРСТВЕННОГО ТЕХНИЧЕСКОГО УНИВЕРСИТЕТА
Кафедра «Автоматизированные системы обработки
информации и управления»
НАСТРОЙКА ЛОКАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ
Методические указания к выполнению лабораторной работы № 4
по дисциплине «Локальные системы управления технологическими процессами»
РПК «Политехник»
Волгоград
2007
УДК 681.5
Н 32
Настройка локальных систем управления: Методические указания к выполнению лабораторной работы № 4 по дисциплине «Локальные системы управления технологическими процессами» / Сост. ; Волгоград. гос. техн. ун-т. – Волгоград, 2007. – 15 с.
Отмечается необходимость и приводятся структуры организации настройки локальных систем управления. Рассматриваются методы настройки локальных систем с типовым пропорционально-интегрально-дифференциальными регуляторами, в том числе и метод Циглера-Никольса.
Предназначены для студентов, обучающихся по направлениям 654600 «Информатика и вычислительная техника» и специальности 220200 «Автоматизированные системы обработки информации и управления» очной и очно-заочной форм обучения по основной и сокращенной программам обучения.
Ил. 8. Библиогр.: 3 назв.
Рецензент:
Печатается по решению редакционно-издательского совета
Волгоградского государственного технического университета
Составитель: Владимир Николаевич Семенов
НАСТРОЙКА ЛОКАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ
Методические указания к выполнению лабораторной работы № 4
по дисциплине «Локальные системы управления технологическими процессами»
Под редакцией автора
Темплан 2007 г., поз. № 31.
Подписано в печать г. Формат 60×84 1/16.
Бумага листовая. Печать офсетная.
Усл. печ. л. 0,94. Усл. авт. л. 0,81.
Тираж 50 экз. Заказ №
Волгоградский государственный технический университет
400131 Волгоград, просп. им. , 28.
РПК «Политехник»
Волгоградского государственного технического университета
400131 Волгоград, ул. Советская, 35.
© Волгоградский
государственный
 технический
технический
университет, 2007
ВВЕДЕНИЕ
Цель работы: ознакомиться с методами настройки автоматических систем с типовыми регуляторами.
Время выполнения лабораторной работы – 4 аудиторных часа.
Оборудование. Для выполнения лабораторной работы необходим персональный компьютер и математический пакет (например, MathCAD или MathLab, или другой аналогичный).
1. ОСНОВНЫЕ ПОНЯТИЯ
1.1. Необходимость настройки систем автоматического управления
Настройка является завершающим этапом создания систем автоматического управления и проводится непосредственно на действующей системе перед сдачей ее в эксплуатацию. Необходимость настройки вызвана неадекватностью динамических характеристик математической модели объекта (МОБ), используемой на этапе синтеза систем управления, динамическим характеристикам реального объекта (ОБ), включенного в замкнутый контур. Кроме того, необходимость настройки возникает и в процессе эксплуатации систем ввиду изменения непредвиденным образом свойств объекта в силу различных причин (износ оборудования, изменение условий работы и т. д.).
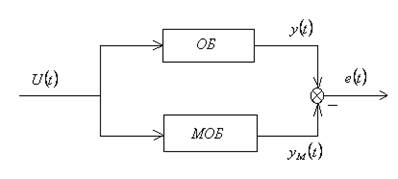
Общепринятая схема определения МОБ, представленная на рис. 1, базируется на результатах проверки соответствия модели реальному, отдельно взятому объекту управления. МОБ в данном случае считается определенной, если при одинаковом входном сигнале U (t) отклонение е(t) реакции модели yM(t) от реакции реального объекта у(t) будет достаточно малым. Однако при таком подходе к определению МОБ встает вопрос о выборе функционала от e(t), численно характеризующего указанное отклонение, а также вопрос о допустимом значении этого функционала, при котором МОБ считается определенной. Ответить на эти вопросы в отрыве от конечной цели использования МОБ т. е. в отрыве от свойств реально действующей оптимальной (в смысле выбранного критерия) системы, которую предполагается построить по этой модели, невозможно. Таким образом, задача определения MОБ является противоречивой – для определения МОБ следует знать критерий оптимальности системы и свойства оптимально настроенного регулятора (РЕГ), для нахождения которого, собственно, и необходима MОБ. Разрешение данного противоречия состоит в системном подходе к построению МОБ [1,2] . Суть системного подхода заключается в том, что в основу проверки адекватности МОБ реальному объекту положена конечная цель использования МОБ - построение реально действующей оптимальной системы управления. Поэтому проверку адекватности МОБ следует проводить по результату сравнения реакций реальной оптимально настроенной системы y(t) и реакции системы yM(t), в которой реальный ОБ заменяется его математической моделью (рис. 2). МОБ здесь считается адекватной реальному ОБ, если при одинаковом входном сигнале g(t) отклонение e(t) регулируемых величин y(t) и ум(t) в этих системах при оптимально настроенном регуляторе РЕГ будет малым в смысле принятого критерия оптимальности системы. Назовем МОБ, полученную по схеме, приведенной на рис. 1, предварительной, а МОБ, определенную по схеме, изображенной на рис. 2, системной. Очевидно, что динамические характеристики реального ОБ и системной MОБ практически совпадают в той области, которая формирует критерий оптимальности реальной системы. Динамические характеристики предварительной МОБ в этой области могут существенным образом отличаться от динамических характеристик реального ОБ.
 Изложенное показывает, что для нахождения системной МОБ приходится применять адаптивную (итерационную) процедуру движения к оптимуму настройки регулятора, на каждом шаге которой уточняются параметры МОБ и параметры настройки регулятора. Причем системная МОБ будет получена на последнем шаге этого движения.
Изложенное показывает, что для нахождения системной МОБ приходится применять адаптивную (итерационную) процедуру движения к оптимуму настройки регулятора, на каждом шаге которой уточняются параметры МОБ и параметры настройки регулятора. Причем системная МОБ будет получена на последнем шаге этого движения.
Рис. 1.
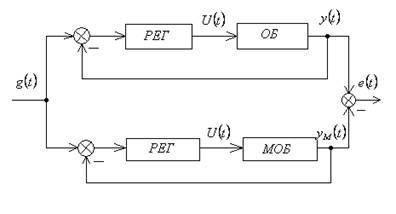 Рис. 2.
Рис. 2.
1.2. Структуры организации настройки регуляторов
Традиционная структура организации настройки регуляторов основана на использовании предварительной МОБ и строится по разомкнутой схеме (рис. 3).
Эта схема состоит из следующих блоков: 1 – формулировка технического задания, включая выбор критерия оптимальности системы; 2 – определение предварительной МОБ; 3 – синтез по предварительной МОБ оптимального регулятора; 4 – реализация полученного регулятора; 5 – проверка работоспособности системы в соответствии с предъявляемыми в техническом задании требованиями. Если требования удовлетворяются, то система передается в эксплуатацию. Однако такая ситуация встречается редко. В большинстве случаев предъявляемые требования не удовлетворяются, и вопрос о сдаче системы в эксплуатацию остается открытым. Дальнейшую доводку системы обычно осуществляют специалисты-наладчики, которые снова проводят экспериментальные исследования по определению предварительной МОБ с последующим использованием полученной модели в простых расчетных процедурах нахождения параметров настройки регулятора. После этого специалисты-наладчики, опираясь на свои практические навыки и интуицию, изменяют значения параметров настройки регулятора, стараясь добиться приемлемого, в той или иной степени, качества регулирования.
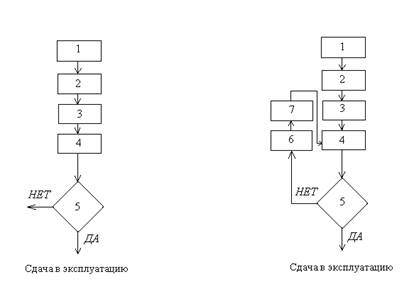 Рис. 3. Рис. 4.
Рис. 3. Рис. 4.
Другая структура организации настройки регуляторов строится по замкнутой схеме (рис. 4). В отличие от схемы, представленной на рис. 3 здесь появились два новых блока – 6 и 7, которые образуют обратную связь в структуре организации настройки регуляторов. Содержание этих блоков следующее: 6 – экспериментальная оценка математической модели объекта (системы) управления; 7 – расчет (коррекция) параметров регулятора по полученной модели. Ввиду того, что работы, выполняемые в блоках 6 и 7, производятся непосредственно на действующей системе, важное значение приобретает оптимизация самой процедуры получения модели, т. е. получение модели с минимальным вмешательством в работу системы. Отметим также, что наличие обратной связи в структуре организации настройки регуляторов позволило снять противоречие в определении МОБ.
Методы настройки регуляторов, построенные на базе схемы, изображенной на рис 3, назовем приближенными, а методы настройки регуляторов, схема которых представлена на рис 4 - адаптивными. Очевидноt что адаптивная настройка обеспечивает более высокое качество управления, чем приближенная.
1.3. Методы настройки систем с типовыми регуляторами
При создании систем автоматического управления техническими объектами широкое распространение поручили типовые ПИ - и ПИД-регуляторы Данные регуляторы могут быть представлены как в аналоговом, так и в цифровом исполнении. В связи с этим возникает задача настройки системы с подобными регуляторами. Далее рассматриваются некоторые методы настройки систем с аналоговыми ПИ - и ПИД-регуляторами, имеющими следующие передаточные функции:
для ПИ-реглятора –
|
для ПИД-регулятора –
|
где Kp, TИ, Тд – коэффициент передачи, постоянная интегрирования и постоянная дифференцирования соответственно.
1.4. Метод Циглера-Никольса
Метод Циглера-Никольса является приближенным и относится к числу наиболее ранних методов, посвященных настройке систем с типовыми регуляторами. Его особенность заключается в отказе от непосредственного определения МОБ. Нахождение параметров настройки в данном методе происходит по эмпирическим формулам. При этом считается, что степень затухания y переходного процесса в настроенной системе будет равна 0,73 - 0,86.
Процедура настройки состоит в следующем.
1. Действующая (ненастроенная) система с ПИ - или ПИД-регулятором превращается в систему с П-регулятором ![]()
2. Постепенным увеличением коэффициента передачи регулятора Кр, система с П-регулятором выводится на границу устойчивости и фиксируется значение коэффициента передачи регулятора К*р, при котором система находится на границе устойчивости, а также период Т возникших автоколебаний.
3. Вычисляются значения параметров настройки регулятора:
для ПИ-регулятора
|
для ПИД-регулятора -
|
4. Полученные значения параметров настройки устанавливаются в соответствующем регуляторе.
1.5. Приближенная настройка системы с ПИ-регулятором по переходной характеристике объекта
Существующие методы расчета параметров настройки систем с типовыми регуляторами по предварительной МОБ могут быть использованы не только на этапе синтеза. Чтобы сделать эти методы более доступными для широкого применения, на их основе разработаны упрощенные методы определения параметров настройки. К числу таких методов относится метод, основанный на аппроксимации экспериментальной переходной характеристики объекта характеристикой апериодического звена с запаздыванием. Передаточная функция указанной модели объекта имеет вид:
| (1) |
где K0, T0, t0 – коэффициент передачи, постоянная времени и время запаздывания объекта соответственно.
K0, T0, t0 находятся непосредственно по графику переходной характеристики объекта. По значениям K0, T0, t0, пользуясь номограммой
(рис. 5), находятся приближенно оптимальные параметры настройки ПИ-регулятора –  За критерий оптимальности здесь принят минимум дисперсии регулируемой величины при низкочастотном случайном возмущении и ограничение на частотный показатель колебательности М£1,62. Пример. Пусть в результате эксперимента получены следующие значения коэффициентов аппроксимирующей модели объекта (1):
За критерий оптимальности здесь принят минимум дисперсии регулируемой величины при низкочастотном случайном возмущении и ограничение на частотный показатель колебательности М£1,62. Пример. Пусть в результате эксперимента получены следующие значения коэффициентов аппроксимирующей модели объекта (1): ![]() По номограмме, представленной на рис.5, для t0/Т0=0,1 находим:
По номограмме, представленной на рис.5, для t0/Т0=0,1 находим: ![]() (пунктирные линии).
(пунктирные линии).
Следовательно, приближенно оптимальные значения коэффициента передачи и постоянной интегрирования ПИ-регулятора равны:
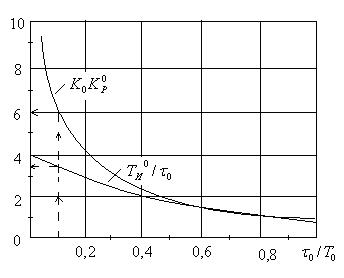
Рис. 5.
1.6. Оптимизация настройки системы с ПИ-регулятором с оценкой на каждом шаге ее переходной характеристики
Данный метод относится к числу адаптивных и представляет собой итерационную (многошаговую) процедуру движения к оптимуму настройки регулятора [1]. На каждом шаге этого движения экспериментально определяется переходная характеристика h(t) системы по каналу действия изменения задания на ошибку регулирования (рис. 6), по которой затем находится период колебаний Т и степень затухания y переходного процесса:
|
где А1 и А2 – две амплитуды переходной характеристики, имеющие один и тот же знак. Практически период колебаний Т, а также амплитуды А1 и А2 выбираются спустя некоторое время после начала переходной характеристики, в течение которого эта характеристика пересечет - 2-3 раза линию своего установившегося значения. После фиксации y и Т определяются параметры аппроксимирующей модели объекта. Далее рассчитываются оптимальные (в смысле выбранного критерия) параметры настройки регулятора. За критерий оптимальности здесь принят минимум дисперсии регулируемой величины при низкочастотном случайном возмущении и ограничении на частотный показатель колебательности М![]() 1,6.
1,6.
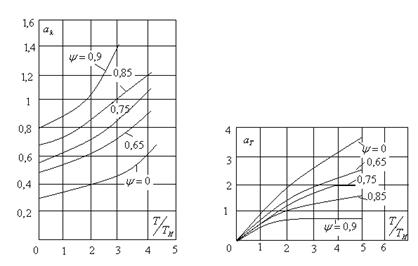
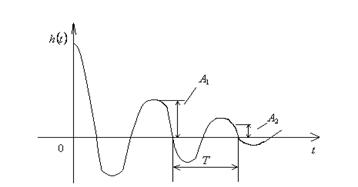 Рис. 6
Рис. 6
Рис. 7 Рис. 8
Критерий оптимальности обычно представляет собой унимодальную функцию параметров настройки регулятора. Поэтому задача оптимизации может формулироваться как задача поиска значений параметров регулятора, при которых эта функция принимает экстремальное значение. Разработано достаточно много процедур такого поиска. Например, при использовании градиентного метода на каждом шаге движения к оптимуму производится оценка частных производных показателя качества J по каждому из настраиваемых параметров регулятора.
Если в системе установлен ПИ-регулятор, то варьируются его коэффициент передачи DКр и постоянная интегрирования DТИ с регистрацией вызванных этими вариациями отклонений показателя качества DJ, т. е. оценка частных производных происходит по отношениям DJk/DКр и DJТ/DТИ. Тогда параметры настройки регулятора на каждом (n+1) шаге вычисляются по результатам экспериментов на предыдущем n-м шаге по формулам
| (2) |
| (3) |
где gk, gT – коэффициенты пропорциональности, выбираемые из условия сходимости итерационной процедуры. Формулы (2), (3) часто записывают в несколько ином виде
| |
|
где
| |
|
Результаты расчетов параметров настройки ПИ-регулятора, выполненные для всех возможных вариантов значений y и T, представлены в виде номограмм, изображенных на рис. 7 и рис. 8.
Процедура поиска оптимальных параметров ПИ-регулятора заключается в следующем.
1. При некоторых, в значительной степени произвольных начальных значениях параметров настройки Кр,1 и TИ,1, регулятор включается в работу, оценивается переходная характеристика системы, по которой затем фиксируются значения y1 и Т1.
2. Вычислив отношение Т1/ТИ,1 по номограммам (рис. 7 и рис. 8) определяются значения коэффициентов ак,1 и аТ,1 и находятся оптимальные (в первом приближении) значения параметров настройки
| |
|
Значения параметров Кр,2 и ТИ,2 устанавливаются в регуляторе, т. е. происходит коррекция настройки регулятора. После этой коррекции опыт вновь повторяется и производится повторная оценка оптимальных параметров настройки ПИ-регулятора и т. д. Такая итерационная процедура повторяется до тех пор, пока полученные на очередном ее шаге значения параметров настройки практически не будут отличаться от предыдущих.
Определение начальной настройки в системах с ПИ-регуляторами и устойчивыми объектами не вызывает затруднений т. к. в подобных системах запас устойчивости увеличивается с увеличением ТИ и уменьшением Кр.
Таким образом, регулятор перед оптимизацией настройки должен включаться при возможно большем значении ТИ и достаточно малом Кр, а затем, постепенным увеличением Кр добиваются появления в системе колебательных переходных процессов.
2. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
2.1. Задание 1. Подготовка к работе
1. Дома: проработать [1], [2], [3], материалы лекций и данного руководства. Ответить на вопросы для самопроверки.
2. В лаборатории: отчитаться по первому пункту данного задания и получить у преподавателя вид математической модели объекта.
2.2. Задание 2. Настроить системы ПИ - и ПИД-регуляторами методом Циглера-Никольса
1. Определить переходную характеристику исходной (ненастроенной) системы с ПИ-регулятором. Параметры начальной настройки должны удовлетворять условию устойчивой работы системы.
2. Провести настройку системы с ПИ-регулятором методом Циглера-Никольса.
3. Определить переходную характеристику системы с настроенным ПИ-регулятором.
4. Определить переходную характеристику исходной (настроенной) системы с ПИД-регулятором. Параметры начальной настройки ПИД-регулятора должны удовлетворять условию устойчивой работы системы.
5. Провести настройку системы с ПИД-регулятором методом Циглера-Никольса.
6. Определить переходную характеристику системы с настроенным ПИД-регулятором.
7. Провести сравнительный анализ качества регулирования настроенных и ненастроенных систем.
2.3. Задание 3. Настроить систему с ПИ-регулятором по переходной характеристике объекта
1. Определить переходную характеристику исходной (ненастроенной) системы с ПИ-регулятором. Параметры начальной настройки ПИ-регулятора должны удовлетворять условию устойчивой работы системы.
2. Определить переходную характеристику объекта и по ней найти параметры аппроксимирующей модели объекта (1).
3. Используя номограмму, изображенную на рис. 5, рассчитать параметры настройки ПИ-регулятора.
4. Определить переходную характеристику системы с настроенным ПИ-регулятором.
5. Провести сравнительный анализ качества регулирования настроенной и ненастроенной систем.
2.4. Задание 4. Адаптивная настройка системы с ПИ-регулятором
1. Определить переходную характеристику исходной (ненастроенной) системы с ПИ-регулятором. Параметры начальной настройки ПИ-регулятора должны удовлетворять условию устойчивой работы системы.
2. Настроить систему с ПИ-регулятором, используя номограммы, представленные на рис. 7 и рис. 8. При этом в плоскости Кр, ТИ следует отметить точки, соответствующие значениям параметров Кр, i, ТИ, I, которые получены на каждом i-м шаге движения к оптимуму настройки ПИ-регулятора. Отмеченные точки соединить стрелками.
3. Определить переходную характеристику системы с оптимально настроенным ПИ-регулятором.
4. Провести сравнительный анализ качества регулирования настроенной и ненастроенной систем.
2.5. Задание 5. Учебно-исследовательское.
Исследовать возможность использования при адаптивной настройке методов покоординатного и наискорейшего спуска.
3. СОДЕРЖАНИЕ И ОФОРМЛЕНИЕ ОТЧЕТА
О РАБОТЕ
Отчет должен содержать: название лабораторной работы, формулировку цели работы, основные понятия, схемы организации настройки локальных систем, необходимые формулы и номограммы, а также результаты настройки систем с типовыми регуляторами. Отчет оформляется каждым студентом отдельно. Титульный лист отчета должен быть установленного образца.
4. ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Чем вызвана необходимость настройки систем автоматического управления?
2. В чем суть системного подхода к построению математической модели объекта управления?
3. Объясните отличие структур организации настройки регуляторов?
4. В чем заключается настройка систем с типовые регуляторами методом Циглера-Никольса?
5. В чем заключается настройка систем с ПИ-регулятором по переходной характеристике объекта?
6. В чем заключается адаптивная настройка систем с ПИ-регулятором?
5. ЛИТЕРАТУРА
1. Ротач автоматического управления. – М.: МЭИ, 2004. – 400 с.
2. Ротач динамики промышленных автоматических систем регулирования. – М.: Энергия, 1973. – 440 с.
3. Автоматизация настройки систем управления / , , и др.; Под ред. – М.: Энергоатомиздат, 1984. – 272 с.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ.. 1
1. ОСНОВНЫЕ ПОНЯТИЯ 3
1.1. Необходимость настройки систем автоматического управления. 3
1.2. Структуры организации настройки регуляторов. 3
1.3. Методы настройки систем с типовыми регуляторами. 3
1.4. Метод Циглера-Никольса. 3
1.5. Приближенная настройка системы с ПИ-регулятором по переходной характеристике объекта..........................................................3
1.6. Оптимизация настройки системы с ПИ-регулятором с оценкой на каждом шаге ее переходной характеристики 3
2. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ 3
2.1. Задание 1. Подготовка к работе. 3
2.2. Задание 2. Настроить системы ПИ - и ПИД-регуляторами методом Циглера-Никольса 3
2.3. Задание 3. Настроить систему с ПИ-регулятором по переходной характеристике объекта 3
2.4. Задание 4. Адаптивная настройка системы с ПИ-регулятором.. 3
2.5. Задание 5. Учебно-исследовательское. 3
3. СОДЕРЖАНИЕ И ОФОРМЛЕНИЕ ОТЧЕТА О РАБОТЕ 3
4. ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ 3
5. ЛИТЕРАТУРА.. 3
