
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Некоммерческая организация «Ассоциация московских вузов»
Государственное образовательное учреждение
высшего профессионального образования
Московский государственный индустриальный университет
ГОУ ВПО МГИУ
Научно-образовательный материал
«Привод главного движения»
Состав научно-образовательного коллектива:
, к. т.н.
, к. т.н., доцент
Москва 2010 г.
Привод главного движения.
В приводах главного движения станка с ЧПУ преимущественно применяют регулируемые приводы с двигателем постоянного тока и тиристорным преобразователем напряжений. Необходимая мощность привода главного движения станка изменяется в функции частоты вращения шпинделя. При этом номинальная мощность не используется при высоких и низких частотах вращения.
Как видно из рис.1, полезная мощность привода примерно до 1/3 или даже 1/2 диапазона регулирования возрастает пропорционально частоте вращения и регулирования в этой части диапазона необходимо производить с постоянным моментом. Далее мощность привода достигает своего максимума и после этого незначительно снижается при наибольшей частоте вращения. На этом участке привод можно регулировать с постоянной максимально допустимой мощностью.
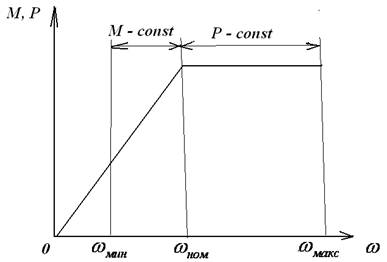
Рис.1. График полезной мощности регулируемого привода с двигателем постоянного тока и тиристорным преобразователем напряжения (М, Р, w – соответственно момент, мощность, частота вращения привода)
Регулирование с постоянной максимально допустимой мощностью осуществляется путем изменения тока возбуждения при неизменном напряжении на якоре. При этом частота вращения изменяется вверх от номинальной частоты в небольшом диапазоне, который определяется коммутационными возможностями двигателей постоянного тока. Для двигателей постоянного тока серии 2П этот диапазон Rр = const= 1:4. В том случае, когда по технологическим требованиям диапазон Rр необходимо увеличить, вводят дополнительную коробку скоростей.
Для регулирования с постоянным максимально допустимым моментом (Rм) необходимо изменять напряжение на якоре при неизменном возбуждении, так же как это делают в регулируемом приводе. Частота вращения при этом регулируется вниз от номинала, и диапазон регулирования может быть достаточно большим. Обычно по технологическим требованиям необходимо иметь Rм = const = 1:20. Однако в станках этот диапазон может быть увеличен. Это связано с необходимостью точного позиционирования шпинделя станка при смене инструмента. Привод (вращения) шпинделя в этом случае переключается на малую "ползучую" скорость, при которой обеспечивается высокая точность остановки шпинделя по углу.
Рис. 2. Кинематическая схема привода главного движения станка с ЧПУ (М – двигатель постоянного тока с теристорным преобразователем; 2 – ременная передача; 3,4,7,8,9,10 – зубчатые колеса; 5,6 – электромагнитные муфты; 11 – шпиндель станка; 12 – фотоэлектрический датчик обратной связи)
На рис. 2. показан один из возможных вариантов конструктивного решения привода главного движения металлорежущего станка с ЧПУ, сочетающий в себе преимущество регулируемого привода постоянного тока с тиристорным преобразователем и традиционной переборной группы универсальных станков. ![]()
