
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
АВТОНОМНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
МУНИЦИПАЛЬНОГО ОБРАЗОВАНИЯ
ГОРОДА ДОЛГОПРУДНОГО
ЛИЦЕЙ №11 «ФИЗТЕХ»
XII научно-практическая конференция
Старт в инновации
Изучение широких атмосферных ливней(ШАЛ)
Авторы работы:
Саян Георгий, Жугастров Георгий, Уголков Владислав , 8 класс
Научный руководитель:
2013 г.
Оглавление
1.Введение.
2.Устройство установки:
А) Сцинтилляционный детектор.
Б) ФЭУ.
В) Дискриминатор.
Г) Схема совпадений.
Д) Использование GPS.
3. Определение уровня фона.
4. Заключение.
5. Список литературы.
Введение
 Частицы, прилетающие к нам из космоса, не достигают поверхности земли, потому что начинают взаимодействовать с ядрами атомов в атмосфере. В этих столкновениях они произведут новые частицы, которые тоже могут провзаимодействовать в более глубоких слоях атмосферы. В результате поверхности Земли достигает не сама прилетевшая из космоса частица, а целая группа всевозможных частиц, порожденных ею. Эта совокупность частиц и называется Широким Атмосферным Ливнем (ШАЛ). Мы не можем зарегистрировать первичную частицу, но может получить информацию о ливневых частицах (в нашей работе – об электронно-фотонной компоненте ливня), и тем самым узнать что-то про первичную частицу.
Частицы, прилетающие к нам из космоса, не достигают поверхности земли, потому что начинают взаимодействовать с ядрами атомов в атмосфере. В этих столкновениях они произведут новые частицы, которые тоже могут провзаимодействовать в более глубоких слоях атмосферы. В результате поверхности Земли достигает не сама прилетевшая из космоса частица, а целая группа всевозможных частиц, порожденных ею. Эта совокупность частиц и называется Широким Атмосферным Ливнем (ШАЛ). Мы не можем зарегистрировать первичную частицу, но может получить информацию о ливневых частицах (в нашей работе – об электронно-фотонной компоненте ливня), и тем самым узнать что-то про первичную частицу.
Установка для регистрации ШАЛ «Русалка» находится в ОИЯИ (г. Дубна). При выполнении работы мы пользовались готовыми программами обработки данных, которые позволяют подсчитывать усредненную скорость счета станций, разность времен прихода сигналов dT и некоторые другие величины.
Устройство установки
Основной элемент распределенной установки - базовая станция - состоит из двух сцинтилляционных детекторов, приемника GPS системы, блока электроники и источников питания.
Сцинтилляционный детектор.
Сцинтилляционный детектор выдает электрический сигнал каждый раз, когда детектор пересекает ионизирующая частица из широкого атмосферного ливня. (В нашем случае это может быть электрон или фотон). Сначала в сцинтилляторе происходит преобразование ионизационных потерь частицы во вспышку света. После чего этот свет собирается с помощью спектросмещающих волокон – файберов диаметром 1 мм, вклеенных в канавки, вырезанные на плоскости пластин сцинтиллятора вдоль их длины. Оптические волокна отличаются тем, что свет, попавшийв волокно под нужным углом, распространяется по нему с очень маленькими потерями, что позволяет использовать оптоволокно для передачи оптического сигнала на огромные расстояния.
Наиболее важным и сложным элементом рабочей станции является электронный блок, в котором происходит обработка информации от сцинтилляционных детекторов. Там же происходит превращение светового сигнала в электрический. Затем сигнал попадет в дискриминатор, назначение которого — сравнение уровня сигнала, поступающего на вход, с неким эталонным уровнем.
ФЭУ.
В детекторе используется фотоумножитель ФЭУ-85. Назначение ФЭУ – преобразовать световой сигнал, пришедший по файберам, в электрический, и усилить его.
Дискриминатор.
После того, как сигнал был усилен ФЭУ, дискриминатор «принимает решение», считать ли это сигналом. Это может быть шум, как в любом электронном приборе, к тому же форма сигнала, приходящего со сцинтиллятора, может сильно отличаться для разных срабатываний. Дискриминатор должен превратить этот сигнал произвольной формы в стандартный сигнал. Дискриминатор имеет свой «эталонный» (постоянный) уровень напряжения, с которым он сравнивает сигнал, приходящий от детектора. Пока сигнал меньше эталонного уровня - на выходе ничего нет. Как только эти два уровня сравниваются на выходе появляется некий стандартный уровень. Он исчезает, как только сигнал становится меньше эталонного уровня.
Таким образом, после прохождения дискриминатора форма сигнала не сохраняется, но появляется цифровой сигнал, длительность которого связана с длительностью исходного сигнала и который можно дальше обрабатывать с помощью цифровой электроники.
Схема совпадений.
Существуют три возможные причины появления сигнала: прохождение одной или нескольких частиц из “пучка” частиц ШАЛ; шумовое срабатывание ФЭУ (как и в любой системе с большим усилением это вполне возможно); радиоактивный фон от минералов Земли. Для отбора только нужных нам сигналов и необходимо поставить рядом второй детектор и регистрировать (записывать данные) только о тех событиях, в которых в обоих счетчиках появятся сигналы во временном “окне” ± dT (в настоящий момент выбрано ± 1 микросекунда). Понятно, что и шум и фоновая радиация таких событий почти не даст, а в “пучке” ливня одновременно рядом летят сотни частиц.
Мы должны выбрать из всех поступающих событий только такие пары событий в двух счетчиках, когда оба сигнала появляются в пределах заданного нами временного диапазона. Условие совпадения можно записать в виде |t0(1) - t0(2)| < Tсовп. Время Тсовп установлено равным 1 мкс. В реальной жизни мы же не знаем с 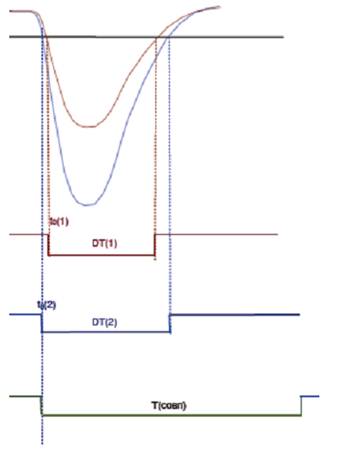 какой стороны прилетит ШАЛ и, следовательно какой из двух счетчиков сработает первым, поэтому разницу записываем по модулю. У схемы совпадений (СС) два входа, на которые поступают сигналы от наших детекторов, сформированные в дискриминаторах, и один выход. Первый из появившихся в любом из двух наших детекторов сигналов запускает внутри СС сигнал заданной нами длительности Tсовп. Он показан на рисунке в самом низу. После чего схема смотрит, если по соседнему каналу в течение времени Tсовп появляется второй сигнал - на выходе СС тотчас же появляется сигнал, который означает, что в пределах указанного вами временного диапазона Tсовп было совпадение времен появления сигналов с двух детекторов. Это “триггерный” сигнал, и при его появлении мы запускаем всю процедуру обработки и передачи в ПК данных.
какой стороны прилетит ШАЛ и, следовательно какой из двух счетчиков сработает первым, поэтому разницу записываем по модулю. У схемы совпадений (СС) два входа, на которые поступают сигналы от наших детекторов, сформированные в дискриминаторах, и один выход. Первый из появившихся в любом из двух наших детекторов сигналов запускает внутри СС сигнал заданной нами длительности Tсовп. Он показан на рисунке в самом низу. После чего схема смотрит, если по соседнему каналу в течение времени Tсовп появляется второй сигнал - на выходе СС тотчас же появляется сигнал, который означает, что в пределах указанного вами временного диапазона Tсовп было совпадение времен появления сигналов с двух детекторов. Это “триггерный” сигнал, и при его появлении мы запускаем всю процедуру обработки и передачи в ПК данных.
Использование GPS.
Использование в данном проекте приемников системы глобального спутникового позиционирования имеет ключевое значение. Вокруг Земли запускается система из нескольких (24) спутников. Каждый спутник излучает радиоволны, содержащие информацию о его положении на орбите, и эталонный сигнал абсолютного (единого для всех спутников) времени.
Приемник этого радиоизлучения на Земле, снабженный программами расшифровки этой информации, на основании данных, полученных от нескольких спутников одновременно, может с высокой точностью определить географическое положение приемника и, что особенно важно для рассматриваемого проекта, снабдить приемник информацией об абсолютном (едином для всей Земли) значении времени с высочайшей точностью (около 50 наносекунд). А это значит, что зарегистрированное в данной рабочей станции событие имеет точную абсолютную временную отметку и может анализироваться совместно со всеми другими данными, получаемыми в установке.
Определение уровня фона
Определим процент фоновых (не относящихся к прохождению ливня) событий (уровень фона). Для этого получим гистограмму распределения времен dT. Время dT – это разность времени прихода сигналов с первой и второй пластины детектора. Благодаря схеме совпадений записываются только те события, в которых dT не превышает 1,2 мкс. Но мы можем рассмотреть это распределение более детально.
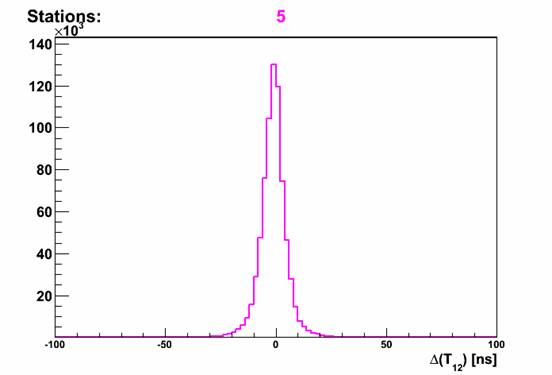
Распределение величины dT изображено на этой гистограмме. Гистограмма – это способ представления данных. Горизонтальная ось разбивается на отрезки (бины). Их количество может быть задано программе. Над каждым бином изображается столбик, высота которого соответсвует количеству событий, в которых dT имело значение из данного промежутка (бина). dT может быть отрицательным, т. к. dT=T1-T2, а частица может попасть раньше в первую станцию, чем во вторую, а тогда T1<T2. Видно, что большинство событий (совпадений) имеют dT очень близкое к 0. Это означает, что мы действительно эффективно записываем сигналы от прихода в основном ливневых частиц.
Рассмотрим тот же график в логарифмическом масштабе. 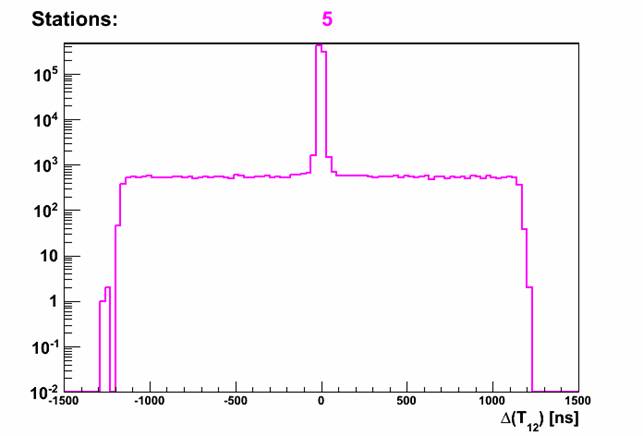
Логарифмический масштаб «сжимает» вертикальную ось таким образом, что на равных расстояниях находятся отметки 10, 100, 1000 и т. д. При этом используются те же самые данные, что и при построении предыдущего графика. Но на предыдущем графике не видна постоянная «подложка» на уровне примерно 600 событий, т. к. отметка 600 сливается на изображении с горизонтальной осью.
Эта «подложка» соответствует тем событиям, которые не связаны друг с другом и могут создавать сигналы с любой разницей прихода dT. То есть это и есть фон. В области пика он тоже есть, и логично предположить, что такой же по величине, как и на краях графика. То есть если бы не было никаких ливневых частиц, мы бы регистрировали только сигналы от случайных совпадений, и на графике было бы примерно 600 событий в каждом бине. Это происходит потому, что случайные события не связаны друг с другом и с одинаковой вероятностью могут прийти как с разницей dT близкой к 0, так и близкой к 1,2 мкс, например.
Таким образом, предположив, что фон в области пика такой же, как и по краям, оценим уровень фона (процент случайных совпадений среди всех записанных данных).
Посчитаем количество событий в пике (возьмем 4 бина, наиболее близкие к 0, пик почти полностью помещается в них). Для этого просуммируем количество событий в этих четырех бинах. Получим примерно 803000 событий в пике. В подложке примерно 53000 событий (88 бинов по 600 событий в каждом). Итого было записано 856000 событий, из которых примерно 55000 фоновых. Тогда уровень фона равен 55000/856000=0,064, т. е. около 7%.
Исследуем теперь разницу в скорости счета станций в дневное и ночное время. Для этого будем использовать программу Rate(time) для вычисления усредненной скорости счета станций за определенное время. Количество бинов по времени установим так, чтобы за каждые сутки получать интенсивность счета станции, усредненную за утро (04:00 - 10:00), день (10:00 – 16:00), вечер (16:00 – 22:00) и ночь (22:00 – 04:00). Затем будем сравнивать скорости счета днем и ночью. Чем больше данных мы возьмем, тем точнее будет результат.
Результат, полученный по более чем 100 точкам с разных станций для отношения (скорость счета днем)/(скорость счета ночью) – 0,988±0,020. Ошибка считалась как средний квадрат отклонения от среднего значения.
Это означает, что мы не наблюдаем влияния Солнца как источника первичных космических лучей. Такой результат подтверждается большим количеством научных статей, в которых показано, что космические лучи приходят к Земле одинаково со всех сторон— с направления, противоположного Солнцу, в том же количестве, что и с направления от Солнца. Следовательно, источник их должен находиться где-то вне солнечной системы. Однако равномерное распределение космических лучей не давало возможности связать их с какими-либо конкретными объектами во Вселенной.
Заключение
Проект «Ливни» является общедоступным ресурсом, позволяющим использовать собранные данные для исследования вторичных космических лучей. Мы изучили устройство установки, по этим данным определили, какое количество записанных событий действительно связано с попаданием частиц ливней, и выяснили, что Солнце не является основным источником первичных космических частиц. Далее эти данные могут использоваться для изучения распределения частиц по углам прилета на Землю и для поиска неслучайной компоненты первичных космических лучей (например, из-за вспышек сверхновых).
Список литературы:
Сайт проекта http://livni. *****/
О ШАЛ http://nuclphys. sinp. *****/spargalka/039.htm
http://ru. wikipedia. org/wiki/Погрешность измерения
