
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Параметрический синтез расчетной статической характеристики измерительного устройства.
Параметрическим синтезом расчетной статической характеристики измерительного устройства (РСХ ИУ)|
![]()
называется определение таких значений параметров q1,q2,...,qn этой характеристики, при которых ее отклонение от желаемой статической характеристики устройства y=fg(x) на интервале xn≤x≤xv не превышает заданного значения или оказывается минимальным.
Известны три метода решения этой задачи:
1) метод интерполяции;
2) метод наименьших модулей;
3) метод наименьших квадратов.
Выбор метода зависит от требований к максимальной величине и характеру распределения погрешности приближения
![]()
по диапазону измерений. Рассмотрим эти методы.
СИНТЕЗ ПАРАМЕТРОВ РАСЧЕТНОЙ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА МЕТОДОМ ИНТЕРПОЛЯЦИИ
Метод интерполяции основан на совпадении расчетной и желаемой характеристик ИУ в заданной (или выбранной) системе п точек, называемых узлами интерполяции. При этом потрешность приближения (2.80) оказывается равной нулю в n точках диапазона измерений, а расчет искомых параметров РСХ ИУ сводится к решению системы n алгебраических уравнений
![]()
где рi - абсциссы узлов интерполяции, размещенные внутри диапазона измерений так, что хn≤p1≤p2<...<pn≤xv; n - число узлов интерполяции.
Основная трудность метода состоит в правильном выборе числа узлов интерполяции и правильном их размещении по диапазону измерении. При решении этих задач рекомендуется пользоваться следующим приемом [Грейм проектирования и расчет механизмов приборов - Л., Машиностроение, 1977]. Сначала число узлов интерполяции принимают равным числу неизвестных параметров РСХ ИУ и размещают эти узлы внутри диапазона измерений xn≤x≤xv равномерно, т. е. принимают
![]()
где ![]() - расстояние между узлами по оси абсцисс.
- расстояние между узлами по оси абсцисс.
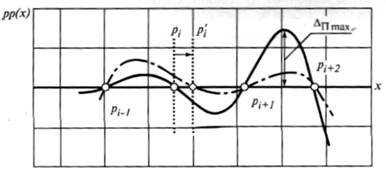
Затем, подставляя выражения друг в друга и решая полученную систему уравнений, определяют исходные значения параметров РСХ ИУ q10,q20,...,qno, которые рассматривают в качестве первого приближения к искомому решению задачи. После этого строят график зависимости погрешности приближения pp(x) отv измеряемой величины х в интервале xn≤x≤xv (см рис.) и проводят его анализ. Цель анализа заключается в оценке выполнения тех требований, которые предъявляются к характеру распределения погрешности приближения по диапазону измерений или к максимальному значению этой погрешности. Если какое-либо из этих требований не выполняется, то изменяют координаты одного или нескольких узлов интерполяции. добиваясь выполнения заданных требований. При этом руководствуются следующим правилом Новодворского [Грейм проектирования и расчет механизмов приборов - Л., Машиностроение, 1977]. :
сближение двух соседних узлов интерполяции вызывает уменьшение погрешности приближения на участке, расположенном между этими узлами и, кроме того, изменяет погрешность на других участках таким образом, что если узел Pi смещается в сторону узла Pi+1, то на всех участках (Pi, Pi+1). (Рi+1 и Рi+2) и т. д., расположенных правее смещаемого узла, приближение улучшается, а на всех других участках, расположенных левее этого узла, - ухудшается.
другими словами, смешение узла интерполяции вправо приводит к уменьшению погрешности приближения на всех участках. расположенных правее смещаемого узла, и к увеличению этой погрешности на всех других участках, как это показано на рис.
К сожалению. правило Новодворского позволяет предсказать изменение только лишь формы графика погрешности приближения, вызванное смещением какого - либо узла интерполяции, а не степень соответствующего уменьшения (или увеличения) этой погрешности. Однако если расчеты проводятся на компьютере, то отмеченный «недостаток» исчезает, так как результаты расчета позволяют легко и быстро провести анализ не только формы, но и значений ординат графика погрешности приближения.
Схема расчета параметров статической характеристики ИУ q1,q2,...,qn методом интерполяции показана на рис. 2.42. В соответствии с этой схемой, задавшись числом искомых параметров РСХ ИУ n и первоначальным размещением узлов интерполяции по диапазону измерений P10,P20,...,Pn0, находят исходные значения этих параметров q10mq20,...,qn0, а затем строят соответствующий график погрешности приближения Гpp(x), с помощью которого определяют максимальное абсолютное значение этой погрешности
![]()
и максимальную приведенную погрешность приближения (МППП)

где fgn, fgv - граничные ординаты на графике желаемой статической характеристики ИУ.
П р и м е ч а н и е - Использование знака модуля в формуле ![]() исключает получение отрицательного значения МППП в случае монотонно убывающей желаемой характеристики ИУ.
исключает получение отрицательного значения МППП в случае монотонно убывающей желаемой характеристики ИУ.

Изменяя (с учетом правила Новодворского) положение узлов интерполяции, стремятся требуемым образом распределить погрешность приближения по диапазону измерений или снизить максимальную погрешность до заданного уровня, т. е. добиться выполнения условия ![]() , где
, где ![]() - допустимое значение погрешности.
- допустимое значение погрешности.
ПРИМЕЧАНИЕ – Первоначальное размещение узлов интерполяции по диапазону измерений p10,p20,....pn0 можно согласовывать с известным размещением корней полиномов Чебышева, обладающих свойством минимальной величины максимального отклонения. В этом случае снижается число итераций, необходимое для получения оптимального решения, однако если задача решается с помощью компьютера, этот выигрыш заметно утрачивает свое значение.
Если система уравнений (РСХ ИУ) не имеет решения, то приходится уменьшать число оптимизируемых параметров РСХ ИУ и соответственно снижать число узлов интерполяции n, т. е. уменьшать число таких точек, в которых погрешность приближения (2.80) равна нулю. Часть этих параметров можно задать «из конструктивных соображений». В результате число n также уменьшится, что может упростить последующее решение задачи. Однако увеличение «числа степеней свободы» обычно способствует снижению погрешности приближения (2.80) и, наоборот, уменьшение этого числа приводит к росту этой погрешности. С другой стороны, необоснованное увеличение числа n может, помимо неоправданного усложнения схемы прибора, повысить его чувствительность к малым вариациям параметров РСХ ИУ, которые неизбежно сопровождают работу прибора. При этом достигнутое снижение погрешности приближения окажется иллюзорным. Поэтому окончательное решение о числе оптимизируемых параметров прибора требует обоснования и обычно является следствием компромисса. В любом случае, чем больше это число, тем меньше максимальная приведенная погрешность приближения.
