

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
д. т.н., проф., ИрГТУ; аспирант. ИрГТУ
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ДИНАМИЧЕСКОГО МЕТОДА ДИАГНОСТИРОВАНИЯ АВТОМОБИЛЬНЫХ РЕГУЛЯТОРОВ ТОРМОЗНЫХ СИЛ
В настоящее время очень остро стоит вопрос о повышении безопасности дорожного движения автотранспортных средств (АТС) при торможении. Особенно это касается грузовых автомобилей, оснащенных многоконтурным пневматическим тормозным приводом (МПТП) в состав которого входит регулятор тормозных сил (РТС). На автомобилях КамАЗ в МПТП установлен РТС лучевого типа. Он ограничивает давление воздуха подаваемого к тормозным механизмам колес задней тележки в зависимости от командного давления и от нагрузки на заднюю тележку. РТС является элементом МПТП, который повышает устойчивость автомобиля при торможении за счет снижения эффективности торможения в определенных пределах, с учетом требований ГОСТ Р [1]. В связи с этим работа исправного РТС в составе МПТП оказывает существенное влияние на процесс торможения автомобиля.
Для поддержания РТС в технически исправном состоянии необходимы современные, высокоточные средства диагностирования.
Как показал анализ существующих средств диагностирования, в настоящее время нет достаточно информативного метода, который позволил бы провести динамическое диагностирование РТС автомобилей, находящихся в эксплуатации.
Для разработки метода диагностирования и регулировки РТС была поставлена задача: выявить, как влияет работа РТС на процесс торможения; как на работе РТС отражается положение его рычага; определить параметры, которые наиболее информативно отражают процесс работы РТС и в дальнейшем будут пригодны для диагностирования и регулировки.
Для решения этой задачи были проведены:
-экспериментальные исследования процесса торможения автомобиля КамАЗ в дорожных условиях; [3]
-экспериментальное исследование работы РТС установленного на автомобиле;
-экспериментальное исследование работы РТС, снятого с автомобиля, в стендовых условиях;
Основной задачей при проведении исследования процесса торможения автомобиля КамАЗ-5320 в дорожных условиях являлось измерение и регистрация параметров эффективности и устойчивости при торможении автомобиля. Это установившееся замедление jуст, время срабатывания привода tпр, тормозной путь Sт, начальная скорость торможения V0 и линейное отклонение Lотк, а также параметров функционирования МПТП, таких как давление сжатого воздуха в тормозном контуре колес передней оси Р1, давление на входе в РТС Р2, давление на выходе из РТС Р3 и угол поворота Q рычага РТС.
Для проведения таких исследований был создан компьютерный исследовательский комплекс, структурная блок-схема которого приведена на рис.1, состоит из двух систем: системы регистрации параметров эффективности и устойчивости автотранспортного средства (АТС) при торможении (система 1) и системы регистрации параметров работы МПТП (система 2).
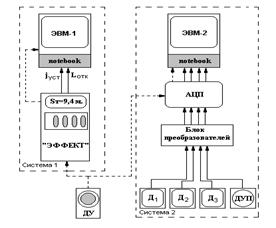
Рис. 1
Блок-схема комплекса для исследования процесса торможения автомобиля.
ДУ-датчик усилия нажатия на педаль тормоза, Д1-датчик давления в тормозном контуре колес передней оси, Д2-датчик давления установленный на входе в РТС, Д3-датчик давления установленный на выходе из РТС, ДУП-датчик угла поворота рычага РТС, АЦП-аналого-цифровой преобразователь.
Первая система состоит из ЭВМ-1 типа «Notebook», прибора «Эффект» [4] датчика усилия нажатия ДУ на педаль тормоза, который отправляет сигнал синхронизации на ЭВМ-1 для запуска программы «Effekt», регистрирующей данные, поступающие с прибора «Эффект», и на ЭВМ-2 через анолого-цифровой преобразователь (АЦП) для запуска программы «Oscillograf», которая регистрирует данные с датчиков давления и датчика угла поворота (ДУП) рычага РТС. Передача данных от прибора «Эффект» на компьютер осуществляется через порт принтера прибора «Эффект».
Прибор «Эффект» определяет, в соответствии с ГОСТ Р [1], установившееся замедление jycт, пиковое значение усилия нажатия на педаль Рп, длину тормозного пути St, время срабатывания тормозной системы tпр, начальную скорость торможения V0 , а также определяет линейное отклонение Lотк АТС при торможении.
Вторая система состоит из 3-х датчиков давления, ДУП, блока преобразователей (Рис. 2), АЦП и ЭВМ-2 типа «notebook». Датчик давления Д1 измеряет давление в тормозном контуре колёс передней оси, датчик давления Д2 измеряет давление на входе в РТС, а датчик давления Д3 на выходе из РТС. ДУП измеряет угол поворота рычага РТС. Блок преобразователей преобразует изменение сопротивления датчиков в электрический сигнал, эквивалентный этому сопротивлению, и передает его АЦП. АЦП преобразует аналоговый сигнал в двоичные коды и передает в ЭВМ-2.
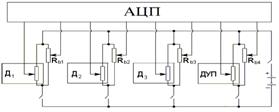
Рис.2
Блок-схема блока преобразователей.
Rb1, Rb2, Rb3, Rb4 – балансировочные сопротивления; Д1 – датчик давления в тормозном контуре колес передней оси; Д2 – датчик давления на входе в РТС; ДУП – датчик угла поворота рычага РТС; Д3 - датчик давления на выходе из РТС;
Для работы компьютерного измерительного комплекса использован АЦП типа Е-330. АЦП предназначен для совместной работы с компьютерами типа Notebook и Roverbook. В качестве программного обеспечения использовались программа «Oscillograph» и программа «Effekt».
В соответствие с требованиями ОСТ 37.002.067 [2], исследование процесса торможения АТС в дорожных условиях проводились в летний период, на прямом, ровном, горизонтальном участке дороге с асфальтобетонным покрытием хорошего качества, без продольных уклонов, температура воздуха находилась в пределах 25-30о С., скорость ветра не превышала 5 км/час. Перед проведением дорожных испытаний автомобиль проверяли на стенде. Выявляли и устраняли неравномерность тормозных сил на колесах каждой оси. Давление в шинах соответствовало нормативному, установленному изготовителем АТС в эксплуатационной документации. Давление проверялось в полностью остывших шинах с использованием манометров. До места проведения испытаний автомобиль двигался по ровной горизонтальной асфальтобетонной дороге протяженностью 43 км для прогрева шин. После прибытия тормозные механизмы автомобиля были «холодными», то есть их температура не превышала 100о С. Испытания проводились в следующем порядке:
1. Подготовить к работе прибор «Эффект».
2. Запустить на ЭВМ-1 программу «Effekt» и активировать режим ожидания.
3. Запустить на ЭВМ-2 программу «Oscillograph», настроить программу в режим однократного ввода, время ввода 10 сек., частота ввода данных 1 кГц, активировать режим ожидания.
4. Разогнать автомобиль до скорости 43-45 км/ч.
5. Отсоединить двигатель от трансмиссии и двигаться накатом, наблюдая за скоростью движения на спидометре.
6. Резко нажать на педаль тормоза при достижении скорости 40 км/ч, при этом сработает датчик ДУ. Сигнал синхронизации с датчика ДУ автоматически переводит программы «Effekt» и «Oscillograph» в режим ввода данных и сигналы с датчиков прибора «Эффект» и датчиков Д1, Д2, Д3, ДУП регистрируются в компьютерах.
7. Повторить испытание не менее двух раз в обоих направлениях.
8. Контролировать запись данных на диск компьютера после каждого торможения.
9. Загрузить в кузов автомобиля груз 5 т. и провести испытания на груженом автомобиле.
В результате дорожных испытаний автомобиля были получены графики давления, замедления, линейного отклонения, угла поворота рычага РТС от времени, при торможении без груза и с грузом 5 т., которые показали влияние работы РТС на процесс торможения автомобиля.
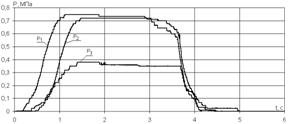
Рис. 3
Давление в ПТП автомобиля КамАЗ-5320(без груза)
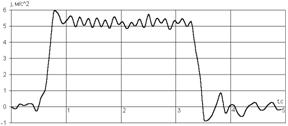
Рис. 4
Замедление при торможении автомобиля КамАЗ-5320 (без груза)
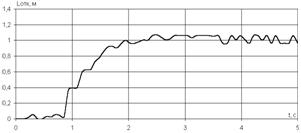
Рис. 5
Линейное отклонение автомобиля КамАЗ-5320 при торможении (без груза)
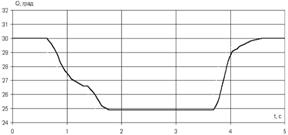
Рис. 6
Угол поворота рычага РТС при торможении автомобиля КамАЗ-5320
(без груза)
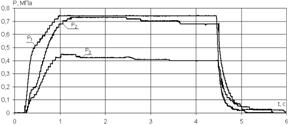
Рис. 7
Давление в ПТП автомобиля КамАЗ-5320 (с грузом 5т.)
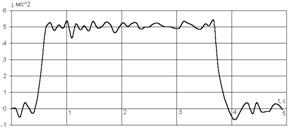
Рис. 8
Замедление при торможении автомобиля КамАЗ-5320 (с грузом 5т.)
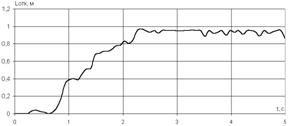
Рис. 9
Линейное отклонение автомобиля КамАЗ-5320 при торможении
(с грузом 5т.)
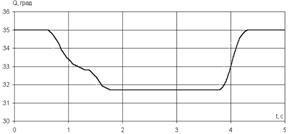
Рис. 10
Угол поворота рычага РТС при торможении автомобиля КамАЗ-5320 (с грузом 5т.)
Основной задачей при исследовании работы РТС было измерение параметров характеризующих его работу. Это давление на входе и выходе из РТС, а также угол поворота его рычага. Для реализации этих исследований были изготовлен компьютерный исследовательский комплекс. Блок-схема которого представлена на рис.11
Работа комплекса осуществляется следующим образом. На реле времени (РВ) 5 задаем интервал в течении которого будем прикладывать к испытуемому РТС тестовое воздействие. Нажимаем кнопку на РВ. Через управляющее устройство (УУ) запускается электромеханическое устройство (ЭМУ) и программа «Oscillograf» в ЭВМ. ЭМУ приводит в движение рычаг РТС, который двигается из одного крайнего положения в другое с постоянной угловой скоростью. Программа «Oscillograf» записывает сигналы с датчиков давления на входе (Д1), выходе (Д2) и ДУП, поступающие на ЭВМ через блок преобразователей АЦП.
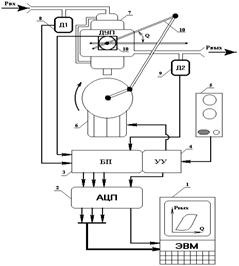
Рис. 11
Блок-схема комплекса для исследования процесса функционирования РТС на автомобиле.
1-ЭВМ; 2-АЦП; 3-блок преобразователей; 4-управляющее устройство; 5-реле времени; 6-электромеханическое устройство; 7-РТС; 8-датчик давления на входе в РТС; 9-датчик давления на выходе из РТС; 10-датчик угла поворота рычага РТС; 11-рычаг РТС
В результате проведенного исследования работы РТС на автомобиле были получены графики изменения угла поворота рычага РТС и давления на выходе из РТС от времени. График зависимости давления на выходе от угла поворота рычага РТС или фазовая динамическая характеристика (ФДХ) РТС.
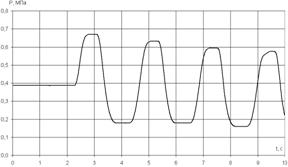
Рис. 12
Давление на выходе из РТС
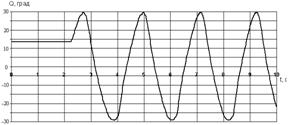
Рис. 13
Угол поворота рычага РТС
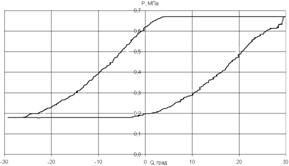
Рис. 14
Зависимость давления на выходе от угла поворота рычага РТС (ФДХ)
Оборудование, предназначенное для стендовых испытаний РТС аналогично компьютерному комплексу для проведения исследований работы РТС на автомобиле, но имеет пневматическое устройство, которое состоит из подающего и приемного контура. Пневматическое устройство предназначено для создания тестового воздействия при испытании РТС. Блок-схема устройства представлена на рис. 15
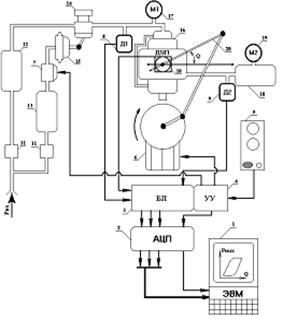
Рис. 15
Блок-схема комплекса для исследования процесса Функционирования РТС в стендовых условиях.
1-ЭВМ; 2-АЦП; 3-блок преобразователей; 4-управляющее устройство; 5-реле времени; 6-электромеханическое устройство; 7-электромагнитный клапан; 8-датчик давления на входе в РТС; 9-датчик давления на выходе из РТС; 10-датчик угла поворота рычага РТС; 11-регуляторы давления; 12,13-рессиверы; 14-двухсекционный тормозной кран; 15-тормозная камера; 16-РТС; 17-манометр на входе в РТС; 18-рессивер приемного контура; 19-манометр на выходе из РТС; 20-рычаг РТС.
Принцип работы этого устройства аналогичен предыдущему. Но вместе с запуском программы «Oscillograf» и ЭМУ открывается электромагнитный клапан (ЭМК). Через ЭМК сжатый воздух поступает в тормозную камеру. Шток тормозной камеры перемещается и открывает двухсекционный тормозной кран (ДСТК). Через ДСТК воздух поступает на вход испытуемого РТС. Выход РТС соединен с приемным контуром, который состоит из ресивера и манометра.
В результате проведенного экспериментального исследования работы РТС установленного на стенде, были получены графики изменения угла поворота рычага РТС и давления на выходе из РТС от времени. График зависимости давления на выходе от угла поворота рычага РТС или ФДХ РТС.
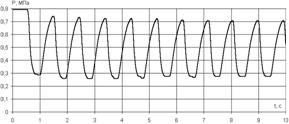
Рис. 16
Давление на выходе из РТС
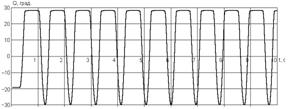
Рис. 17
Угол поворота рычага РТС
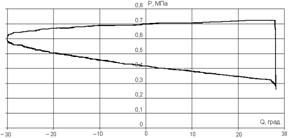
Рис. 18
Зависимость давления на выходе от угла поворота рычага РТС (ФДХ)
Результаты экспериментальных исследований показали, влияние работы РТС в составе ПТП на процесс торможения автомобиля. С их помощью можно оценить удовлетворяет ли техническое состояние РТС выполнению требований ГОСТ Р , касающихся тормозного управления автомобиля. Полученные ФДХ РТС обладают большой информативностью для обеспечения реализации динамического метода диагностирования РТС, как установленных на автомобиле, так и снятых с него. На основе ФДХ РТС будет разработана новая методика регулировки РТС, находящихся в условиях эксплуатации, с учетом технического состояния конкретного автомобиля.
Список литературы:
1. ГОСТ Р . Требования к техническому состоянию АТС.- М.: Изд-во стандартов 2002
2. ОСТ 37.001.067-86. Тормозные свойства автотранспортных средств. Методы испытаний. - М.: Изд-во стандартов, 1986, 84 с.
3. Григорьев комплекс для исследования процесса торможения автомобиля КамАЗ-5320 в дорожных условиях, - г. Улан-Удэ, 2004 г., С.8.
4. Описание работы и технических характеристик прибора «Эффект», НПО «Мета», 2000 г.
Сведения об авторах
1. Аспирант адрес : , ГОУ ВПО «Иркутский Государственный Технический Университет», кафедра «Автомобильного транспорта»;
2. Доктор технических наук, профессор , проректор Иркутского Государственного Технического Университета, заведующий кафедры «Автомобильного транспорта» адрес: ., (3952) р. , д.
