
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
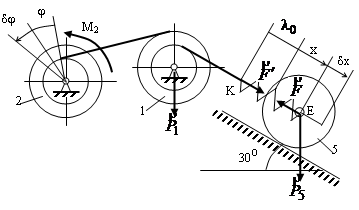
ЗАДАНИЕ Д11–06
Дано: R1= R2= R, r1=0,4R, r2=0,8R, c, Р1= 2Р, Р2= 0, Р5= Р, F = 0, M1 = 0, M2 = –PR
Найти: ![]() – закон изменения обобщенной координаты; частоту k и период
– закон изменения обобщенной координаты; частоту k и период ![]() колебаний.
колебаний.
 РЕШЕНИЕ:
РЕШЕНИЕ:
1. Для решения задачи воспользуемся уравнениями Лагранжа. Система имеет две степени свободы. Выберем в качестве обобщенных координат угол поворота j блока 2 и удлинение пружины х (q1=j, q2=x). Тогда уравнения Лагранжа будут иметь вид
![]() ;
;  .
.
2. Кинетическая энергия системы, равна сумме энергий всех тел (весомых):
 .
.
Т. к. блоки вращаются вокруг своих осей, а каток движется плоскопараллельно, то
 ;
; ![]() , где
, где  ,
, ![]() .
.
Выразим все скорости через обобщенные скорости ![]() и
и![]() :
: ![]() ,
,  . Для определения
. Для определения ![]() рассмотрим движение катка как сложное. Т. к.
рассмотрим движение катка как сложное. Т. к. ![]() определяет положение т. Е по отношению к концу пружины К, получим
определяет положение т. Е по отношению к концу пружины К, получим ![]() , где численно
, где численно  ,
, ![]() . Принимая во внимание, что положительные направления для
. Принимая во внимание, что положительные направления для ![]() и
и![]() разные и что точка касания катком поверхности есть мгновенный центр скоростей катка, получаем
разные и что точка касания катком поверхности есть мгновенный центр скоростей катка, получаем
 и
и ![]() .
.
Следовательно  = =
= =![]() =
= .
.
Отсюда ![]() =
=![]() ,
,  ;
;
![]() =
=![]() ,
, ![]() . (1)
. (1)
3. Определим обобщенные силы ![]() и
и ![]() . На систему действуют активные силы: силы тяжести
. На систему действуют активные силы: силы тяжести ![]() ,
, ![]() , силы упругости
, силы упругости ![]() ,
, ![]() и пара сил с моментом М.
и пара сил с моментом М.
а) Определение ![]() . Сообщим системе возможное перемещение, при котором координата
. Сообщим системе возможное перемещение, при котором координата ![]() получает приращение
получает приращение ![]() (
(![]() ), а
), а ![]() не изменяется (
не изменяется (![]() =0 – пружина при этом не изменяет своей длины). Блоки 1 и 2 связаны нитью т. е.
=0 – пружина при этом не изменяет своей длины). Блоки 1 и 2 связаны нитью т. е.  , отсюда
, отсюда ![]() . Тогда т. К и центр катка Е получают одинаковые перемещения
. Тогда т. К и центр катка Е получают одинаковые перемещения  . Элементарная работа действующих сил равна
. Элементарная работа действующих сил равна
 =
=![]() =
=
б) Определение ![]() . Сообщим системе возможное перемещение, при котором координата
. Сообщим системе возможное перемещение, при котором координата ![]() получает приращение
получает приращение ![]() (
(![]() ), а
), а ![]() не изменяется (т. К не перемещается и блоки не проворачиваются).
не изменяется (т. К не перемещается и блоки не проворачиваются).
Тогда элементарную работу совершат только ![]() и
и ![]() .
.
 =
=![]() .
.
Коэффициенты при ![]() и
и ![]() в записанных выражениях и будут искомыми обобщенными силами. Следовательно
в записанных выражениях и будут искомыми обобщенными силами. Следовательно  и
и ![]() . (2)
. (2)
Подставляя выражения (1) и (2) в уравнения Лагранжа, получим следующие диф. уравнения движения системы:
![]() ,
,  ;
;
или ![]() ,
,  .
.
4. Для определения  исключим из полученных уравнений
исключим из полученных уравнений ![]() .
.
![]() ,
,
![]() . Отсюда
. Отсюда  ,
,
![]() ,
,  . Обозначим
. Обозначим ![]() ,
,  , (3)
, (3)
тогда получим диф. уравнение вида
 . (4)
. (4)
Общее решение этого уравнения:  , где
, где
![]() – общее решение однородного уравнения
– общее решение однородного уравнения ![]() , т. е.
, т. е.  ;
;
![]() – частное решение уравнения (4), которое (по виду правой части) ищем в виде
– частное решение уравнения (4), которое (по виду правой части) ищем в виде  .
.
Из (4) для ![]() имеем
имеем ![]() . Следовательно
. Следовательно ![]() .
.
Тогда  . Определим постоянные интегрирования по начальным условиям: при
. Определим постоянные интегрирования по начальным условиям: при ![]()
![]() и
и ![]() (движения начинается из состояния покоя и пружина не деформирована)
(движения начинается из состояния покоя и пружина не деформирована) ![]() и
и ![]() . Таким образом, искомая зависимость
. Таким образом, искомая зависимость ![]() имеет вид:
имеет вид:
 . (5)
. (5)
(здесь ![]() и
и ![]() рассчитываются по равенствам (3)). Каток совершает колебательные движения по отношению к остальной части системы по закону (5) с круговой частотой
рассчитываются по равенствам (3)). Каток совершает колебательные движения по отношению к остальной части системы по закону (5) с круговой частотой  и периодом колебаний
и периодом колебаний  .
.
