

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1.
2. ВВЕДЕНИЕ
1.1. Допущения сопротивления материалов
Сопротивление материалов – это наука о прочности, жесткости и устойчивости. Прочность – это способность материала выдерживать заданные нагрузки, не разрушаясь. Жесткость – это способность конструкции сопротивляться деформированию при действии заданных нагрузок. Устойчивость – это способность конструкции сохранять свою форму при действии заданных нагрузок.
Основные допущения, используемые в сопротивлении материалов :
1. В отличие от теоретической механики, материал считается не абсолютно твердым, а деформируемым.
2. В большинстве задач материал считается абсолютно упругим, то есть принимает первоначальную форму после снятия нагрузки.
3. Материал считается сплошным, то есть не учитывается то, что он состоит из атомов, кристаллов и считается, что материал полностью заполняет весь объем конструкции.
4. Материал считается однородным, то есть весь объем материала обладает одинаковыми механическими свойствами.
5. Материал считается изотропным, то есть имеет одинаковые механические свойства во всех направлениях. Материалы, не обладающие этим свойством, называются анизотропными.
6. Абсолютные деформации элементов конструкции считаются малыми по сравнению с размерами этих элементов.
7. 
 Выполняется принцип суперпозиции или независимости действия сил, то есть, если на конструкцию действуют несколько сил, то усилия, напряжения и перемещения, возникающие в этой конструкции от действия этих сил, будут равны сумме усилий, напряжений и перемещений от действия каждой силы отдельно.
Выполняется принцип суперпозиции или независимости действия сил, то есть, если на конструкцию действуют несколько сил, то усилия, напряжения и перемещения, возникающие в этой конструкции от действия этих сил, будут равны сумме усилий, напряжений и перемещений от действия каждой силы отдельно.
На рис. 1.1 показан пример применения принципа суперпозиции, а на рис. 1.2 приведен пример, в котором этот принцип не работает.
 8. Принцип Сен-Венана. Если на небольшую, по сравнению с размерами конструкции область, действует заданная система сил, то ее можно заменить равнодействующими: силой и моментом, отбросив при рассмотрении конструкции эту малую область
8. Принцип Сен-Венана. Если на небольшую, по сравнению с размерами конструкции область, действует заданная система сил, то ее можно заменить равнодействующими: силой и моментом, отбросив при рассмотрении конструкции эту малую область ![]() , рис. 1.3.
, рис. 1.3.
1.2. Схематизация конструкций и нагрузок
Реальный объект – это та конструкция, которую необходимо рассчитать. Расчетная схема – это реальный объект, освобожденный от несущественных подробностей. На рис.1.4,а. представлен реальный объект - подъемный кран, а на рис.1.4,б. и рис.1.4,в.- расчетные схема троса и стрелы крана.
 В сопротивлении материалов рассматриваются следующие расчетные схемы:
В сопротивлении материалов рассматриваются следующие расчетные схемы:
Стержень (брус, вал, балка) – это элемент конструкции, у которого один размер – длина, намного больше двух
других размеров поперечного сечения.
Оболочка – это элемент конструкции, у которого один размер, толщина, намного меньше двух других размеров. Пластинка – это оболочка с плоской срединной поверхностью.
Рис. 1.5
К расчетной схеме прикладывают нагрузки :
1. Внешние – силы взаимодействия элементов конструкции с окружающими ее телами и внутренние – силы взаимодействия между соседними частицами тела ( молекулами, кристаллами ).
2. Сосредоточенные : сила ( рис.1.5,а ), момент ( рис.1.5,б ) и распределенные по длине ( рис.1.5,в ), по площади и по объему.
3. Статические и динамические в зависимости от скорости их изменения во времени.
4. Постоянные и временные в зависимости от времени их действия.
1.3. Метод сечений, внутренние силы
 Рассмотрим некоторое тело, на которое действуют заданные нагрузки. В каждом месте тела на него действуют свои нагрузки, для их определения используют метод сечений. Мысленно рассекаем тело на две части какой-либо поверхностью, чаще всего используем плоскость ( рис.1.6,а). Затем мысленно одну из частей отбрасываем, и рассматриваем равновесие оставшейся части ( рис.1.6,б ).
Рассмотрим некоторое тело, на которое действуют заданные нагрузки. В каждом месте тела на него действуют свои нагрузки, для их определения используют метод сечений. Мысленно рассекаем тело на две части какой-либо поверхностью, чаще всего используем плоскость ( рис.1.6,а). Затем мысленно одну из частей отбрасываем, и рассматриваем равновесие оставшейся части ( рис.1.6,б ).
 Между I и II частями тела существуют внутренние силы взаимодействия, произвольно направленные. Приведем эти силы взаимодействия к центру тяжести сечения, получим главный вектор
Между I и II частями тела существуют внутренние силы взаимодействия, произвольно направленные. Приведем эти силы взаимодействия к центру тяжести сечения, получим главный вектор ![]() и главный момент
и главный момент ![]() ( рис.1.6,б ).
( рис.1.6,б ).
Разложим главный вектор и главный момент по осям координат ( рис.1.7).
Проекции главного вектора:
![]() - продольная сила,
- продольная сила,
![]() - поперечные силы.
- поперечные силы.
Проекции главного момента:
![]() - крутящий момент,
- крутящий момент,
![]() - изгибающие моменты.
- изгибающие моменты.
Для того, чтобы найти все эти шесть внутренних сил, необходимо составить шесть уравнений равновесия статики пространственной системы сил.
![]() , откуда находим
, откуда находим ![]() .
. ![]() , откуда находим
, откуда находим ![]() .
.
![]() , откуда находим
, откуда находим ![]() .
. ![]() , откуда находим
, откуда находим ![]() .
.
![]() , откуда находим
, откуда находим ![]() .
. ![]() , откуда находим
, откуда находим ![]() .
.
Только после того, как мы нашли из уравнений равновесия все силы, можем знать, какие виды нагружения испытывает тело: растяжение, изгиб или что-либо другое.
 Напряжения. Выделим в сечении малый участок площадью
Напряжения. Выделим в сечении малый участок площадью ![]() . Приведем все силы, действующие на участке
. Приведем все силы, действующие на участке ![]() , к центру тяжести этого участка ( рис.1.8,а ). Получим главный вектор этих сил
, к центру тяжести этого участка ( рис.1.8,а ). Получим главный вектор этих сил ![]() . Главный момент будет отсутствовать вследствие малости плечей сил при их приведении к центру тяжести. Тогда
. Главный момент будет отсутствовать вследствие малости плечей сил при их приведении к центру тяжести. Тогда ![]() - среднее напряжение на площадке
- среднее напряжение на площадке![]() . Напряжение измеряется в
. Напряжение измеряется в ![]() . Стянем площадку
. Стянем площадку ![]() в точку и получим напряжение в точке
в точку и получим напряжение в точке  .
.
Разложим напряжение в точке ![]() на
на
Рис. 1.8 две составляющие: перпендикулярную к
площадке ![]() - нормальное напряжение и лежащую в плоскости площадки
- нормальное напряжение и лежащую в плоскости площадки ![]() - касательное напряжение ( рис.1.8,б ).
- касательное напряжение ( рис.1.8,б ).
Перемещения. При действии нагрузок на конструкцию она меняет свою форму, и каждая точка конструкции перемещается. Перемещения бывают линейными (обозначаются ![]() ) и угловыми (
) и угловыми (![]() ). Проекции линейного перемещения на координатные оси
). Проекции линейного перемещения на координатные оси  обозначаются u, v, w.
обозначаются u, v, w.
Деформации. Абсолютные деформации - это изменения первоначальных размеров в теле при нагружении. Относительная линейная деформация ![]() - это изменение при действии нагрузки длины единичного отрезка, выделенного в теле. Ее проекции на оси обозначаются
- это изменение при действии нагрузки длины единичного отрезка, выделенного в теле. Ее проекции на оси обозначаются ![]() . Относительная угловая деформация
. Относительная угловая деформация ![]() - это изменение при действии нагрузки прямого угла, выделенного двумя отрезками в теле. Проекции угловой деформации на координатные плоскости обозначаются
- это изменение при действии нагрузки прямого угла, выделенного двумя отрезками в теле. Проекции угловой деформации на координатные плоскости обозначаются  .
.
1.4. Геометрические характеристики плоских сечений
Рассмотрим произвольное поперечное сечение стержня. Простейшая геометрическая характеристика сечения – это площадь ( рис. 1.9 )
А = ![]() dA (м2)
dA (м2)
Величины Sx = ![]() ydA (м2) и Sy =
ydA (м2) и Sy = ![]() xdA (м2
xdA (м2
 называются статическими моментами сечения ( или площади ) относительно осей х и у.
называются статическими моментами сечения ( или площади ) относительно осей х и у.
Статический момент сложной фигуры относительно некоторой оси равен сумме статических моментов простых фигур, составляющих эту сложную, относительно той же оси. Оси, проходящие через центр тяжести сечения, называются центральными. Статические моменты сечения относительно центральных осей равны нулю. Статические моменты площади также можно вычислять по формулам:
Sx = Ayc, Sy = Axc, ( 1.2 )
где xc и ус – координаты центра тяжести площади сечения. Чаще всего статические моменты площади используются для определения положения центра тяжести сложной фигуры.
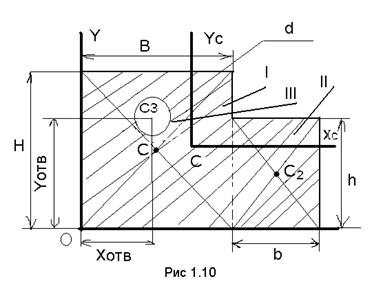
Пример определения положения центра тяжести сложной фигуры.
Разделим сложную фигуру ( рис. 1.10 ) на простые, найдем у них центры тяжести и определим их координаты, а также их площади.
хс1 = В/2, уc1 = H/2, A1 = BH ;
хc2 = B + b/2, уc2 = h/2, A2 = bh ;
хc3 = Xотв, уc3 = Yотв, А3 = pd2/4.
Так как SY = Axc, то
 .
.
Аналогично, из SX = Ayc следует, что

Координаты xc и ус центра тяжести сложной фигуры найдены.
 |
Величины: Ix=![]() y2dA (м4) и Iy =
y2dA (м4) и Iy = ![]() x2dA (м4
x2dA (м4
называются осевыми моментами инерции сечения относительно осей х и у. Ix > 0, Iy > 0.
Величины: Ixy = ![]() xy dA (м4) , ( 1.4 )
xy dA (м4) , ( 1.4 )
Ip =![]() r2dA (м4
r2dA (м4
называются центробежным моментом инерции сечения относительно системы осей х, у и полярным моментом инерции системы относительно полюса 0. Ixy>< 0, IP > 0.
IP = ![]() r2 dA =
r2 dA = ![]() (x2+y2)dA =
(x2+y2)dA = ![]() x2dA +
x2dA + ![]() y2dA = IY + IX .
y2dA = IY + IX .
Величины: Wx = Ix/ êymax ê; Wy = Iy / êxmax ê (м3
называются осевыми моментами сопротивления относительно осей х и у, а величина
Wp = Ip / rmax
- полярным моментом сопротивления.
Величины: ix = ![]()
![]() ; iy =
; iy = ![]() (м
(м
называются радиусами инерции относительно осей х и у.
Примеры определения геометрических характеристик.
Прямоугольное сечение ( рис. 1Элементарную площадку dA выберем в виде полоски b*dy.
 .
.
Аналогично  и
и  .
.
Круглое сечение ( рис. 1Ip =![]() r2dA. Элементарную площадку dA выберем в виде кольца радиусом r и толщиной dr. Если развернем кольцо в полоску, то получим, что dA = 2πrdr.
r2dA. Элементарную площадку dA выберем в виде кольца радиусом r и толщиной dr. Если развернем кольцо в полоску, то получим, что dA = 2πrdr.
Ir = ![]() r2dA =
r2dA = ![]() r22πrdr =2π(
r22πrdr =2π(![]() )
)![]() =
=![]() =
= ![]() =
= ![]() » 0,1d4.
» 0,1d4.
Так как Ip = Ix + Iy, то Ix = Iy = ![]() =
= ![]() =
=![]() » 0,05d4.
» 0,05d4.
Wp = ![]() =
= ![]() =
= ![]() =
= ![]() » 0,2d3.
» 0,2d3.
Wx =Wy =  ê=
ê= ![]() =
= ![]() =
= ![]() » 0,1d3 .
» 0,1d3 .
Кольцевое сечение ( рис.1Моменты инерции сложной фигуры равны сумме моментов инерции простых фигур, составляющих эту сложную. Тогда для кольца Ip = Ip большого круга – Ip меньшего круга=
 .
.
Ix = Iy![]() .
.
Моменты сопротивления сложной фигуры не равны сумме моментов сопротивления простых фигур, составляющих эту сложную
Если бы мы ошибочно считали, что моменты сопротивления сложной фигуры равны сумме моментов сопротивления простых фигур, составляющих эту сложную, то в результате получили бы
 , что неверно!!!.
, что неверно!!!.

Связь между моментами инерции относительно параллельных осей.
Рассмотрим некоторое поперечное сечение, в котором известен центр тяжести сечения С и через него проведены оси х и у ( рис. 1Пусть известны моменты инерции сечения относительно центральных осей: Ix, Iy, Ixy, а также расстояния a, b до произвольных осей х1 и у1.
 Требуется определить:
Требуется определить:
Ix1, Iy1, Ix1y1 .
Выразим х1 и у1 через х и у:
x1 = x – b, y1 = y – a.
Тогда
Ix1 = ![]() y12 dA =
y12 dA =![]() (y – a)2dA = =
(y – a)2dA = =![]() y2dA -
y2dA - ![]() 2yadA +
2yadA + ![]() a2dA = =
a2dA = =![]() y2dA – 2a
y2dA – 2a![]() ydA + a2
ydA + a2![]() dA =
dA =
= Ix –2aSx + a2A.
Так как. ось х – центральная ось, то Sx = 0.
Тогда
Ix1 = Ix + a2A, ( 1.9 )
аналогично
Iy1 = Iy + b2A.
Ix1y1=![]() x1y1dA=
x1y1dA=![]() (x–b)(y–a)dA=
(x–b)(y–a)dA=![]() xydA - b
xydA - b![]() ydA - a
ydA - a![]() xdA + ab
xdA + ab![]() dA= = Ixy – bSx – aSy + abA = Ixy +abA
dA= = Ixy – bSx – aSy + abA = Ixy +abA
Эти формулы используются, когда оси х и у – центральные. Из этих формул следует, что Ix = Ix1 – a2A и Iy = Iy1 – b2A, то есть осевые моменты инерции относительно центральных осей является наименьшими по сравнению с осевыми моментами инерции относительно всех осей, параллельных центральным.
Связь между моментами инерции относительно осей повернутых друг к другу на угол a. Известны моменты инерции относительно произвольных осей Ix, Iy, Ixy и угол a. Требуется найти моменты инерции Ix1, Iy1, Ix1y1 относительно повернутых осей ( рис.1.15 ).
![]() y dA
y dA


![]() y1 B ·
y1 B ·
![]() x1
x1
E a
D · F


 K
K
 O G x
O G x
Рис. 1.15
Выразим координаты повернутой системы осей через координаты заданной системы осей.
x1 = OE = OK + KE = OK + GF =OG cosa +GB sina = x cosa + y sina.
y1 = OD = BE = BF – FE = BF – KG = BG cosa - OG sina = y cosa - x sina.
Тогда
Ix1 = ![]() y12 dA =
y12 dA = ![]() ( y cosa - x sina )2 dA = cos2a
( y cosa - x sina )2 dA = cos2a ![]() y2 dA – 2 sina cosa* *
y2 dA – 2 sina cosa* *![]() xy dA + sin2a
xy dA + sin2a ![]() x2 dA = Ix cos2a + Iv sin2a –Ixy sin2a
x2 dA = Ix cos2a + Iv sin2a –Ixy sin2a
Iy1 = ![]() x12 dA =
x12 dA = ![]() ( x cosa+y sina )2 dA = cos2a
( x cosa+y sina )2 dA = cos2a ![]() x2 dA + 2 cosa sina* *
x2 dA + 2 cosa sina* *![]() xy* dA + sin2a
xy* dA + sin2a ![]() y2dA = Iy cos2a + Ix sin2a + Ixy sin2a
y2dA = Iy cos2a + Ix sin2a + Ixy sin2a
Ix1y1 = ![]() x1y1 dA =
x1y1 dA = ![]() ( x cosa + y sina )( y cosa - x sina ) dA =
( x cosa + y sina )( y cosa - x sina ) dA =
=cos2a ![]() x y dA + sina cosa
x y dA + sina cosa ![]() y2 dA - sina cosa
y2 dA - sina cosa ![]() x2 dA – sin2a
x2 dA – sin2a ![]() xy dA= = Ixy ( cos2a - sin2a ) +
xy dA= = Ixy ( cos2a - sin2a ) + ![]() ( Ix – Iy ) =
( Ix – Iy ) = ![]() + Ixy cos2a
+ Ixy cos2a
Сложим ( 1.11) и ( 1Получим Ix1 + Iy1 = Ix + Iy = const, то есть сумма осевых моментов инерции относительно взаимно перпендикулярных осей проходящих через данную точку есть величина постоянная.
Главные оси инерции. Главные моменты инерции. Если меняется угол a при повороте осей, то будут меняться Ix1 , Iy1 и Ix1y1, но всегда Ix1>0, Iy1 > 0 и Ix1y1>< 0 . При некотором положении угла a = a0, центробежный момент инерции Ix1y1 обратиться в ноль.
Зафиксируем это положение осей ( рис.1.16 ).
 Оси, относительно которых Ix0y0 = 0, называются главными и обозначаются х0 - у0 или u - v. Найдем положение главных осей. Для этого в формуле ( 1.13 ) вместо a подставим a0, а вместо Ix1, Iy1 подставим Ix0, Iy0.
Оси, относительно которых Ix0y0 = 0, называются главными и обозначаются х0 - у0 или u - v. Найдем положение главных осей. Для этого в формуле ( 1.13 ) вместо a подставим a0, а вместо Ix1, Iy1 подставим Ix0, Iy0.
Ix0y0 = ![]() Ixycos2a0 = 0.
Ixycos2a0 = 0.  = -Ixycos2a0;
= -Ixycos2a0; 
Окончательно  ( 1.14 )
( 1.14 )
Подставляем значение a0 в ( 1.11 ) и в ( 1.12 ) , найдем осевые моменты инерции относительно главных осей
Iu = Ix0 = Ixcos2a0 + Iysin2a0 – Ixysin2a
Iv = Iy0 = Iycos2a0 + Ixsin2a0 + Ixysin2a
Осевые моменты инерции относительно главных осей называются главными моментами инерции.
Исследуем значение осевого момента инерции на экстремум в зависимости от угла a. Возьмем производную от выражения ( 1.11 ) по a и приравниваем ее к нулю.
dIy1 / da = Ix2sinacosa - Iy2cosa sina + Ixy2cos2a = 0.
(Ix – Iy)sin2a = - Ixy 2cos2a. sin2a/cos2a = - 2Ixy / (Ix – Iy) = tg2a,
то есть α=α0
Осевые моменты инерции относительно главных осей принимают экстремальные значения по сравнению с осевыми моментами инерции относительно всех взаимно перпендикулярных осей, проходящих через данную точку.
Главные оси, проходящие через центр тяжести, называются главными центральными осями, а соответствующие моменты инерции – главными центральный моментами инерции. Один из этих моментов инерции является наименьшим по сравнению со всеми осевыми моментами инерции сечения относительно любой оси.
Выражения ( 1.15 ) и ( 1.16 ) можно преобразовать таким образом, чтобы в них не входил угол a. Вычтем выражение ( 1.16 ) из выражения ( 1.15 ).
Iu - Iv = Ix(cos2a0-sin2a0)-Iy(cos2a0-sin2a0)-2Ixysin2a0=(Ix-Iy)cos2a0-2Ixysin2a0
Из уравнения ( 1.14 ) следует, что -2 Ixy= ( Ix - Iy ) tg 2 a0
Тогда
 ( 1.17 )
( 1.17 )
Сложим выражения ( 1.15 ) и ( 1.16 )
Iu + Iv = Ix+ Iy
Сложим выражения ( 1.17 ) и ( 1.18 ), затем вычтем из выражения (1.18) выражение ( 1.17 ) и, разделив результаты на 2, окончательно получим
 ( 1.19 )
( 1.19 )
2. ЦЕНТРАЛЬНОЕ РАСТЯЖЕНИЕ - СЖАТИЕ
2.1. Закон Гука. Закон Пуассона
Если из всех внутренних сил, только продольные силы N не равны нулю, а остальные внутренние силы отсутствуют, то стержень испытывает центральное растяжение (сжатие). Экспериментально показано, что с учетом принципа Сен-Венана напряжения в сечении стержня при центральном растяжении (сжатии) распределяются равномерно
![]()
Здесь А – площадь поперечного сечения стержня. Экспериментально показано, что удлинение стержня ( рис. 2.1,а ) прямо пропорционально его длине и действующей нагрузке и обратно пропорционально площади поперечного сечения и зависит от материала. ![]() . Для определения силы N используют
. Для определения силы N используют
а б метод сечений ( рис. 2.1,б )
Рис. 2.1 SFZ = 0, N - F = 0, N = F
Тогда ![]()
Эта формула называется законом Гука для абсолютных удлинений. E – постоянная величина, характеризующая данный материал. Она называется модулем Юнга или модулем продольной упругости, или модулем упругости первого рода, измеряется в Па ( МПа = 106 Па ) . Для сталей Е = (1,8 ÷ 2,1) * 105 МПа. Е * А – жесткость тела при растяжении (сжатии), чем она больше, тем меньше перемещение. Относительное удлинение деформированного стержня или продольная деформация
 . Разделим обе части ( 2.2 ) на
. Разделим обе части ( 2.2 ) на ![]() , получим
, получим ![]() .
.
Откуда выражение закона Гука для материала запишется
 или
или ![]() ( 2.3 )
( 2.3 )
Поперечное сечение стержня при растяжении сужается и его размеры уменьшаются. Величина Dа = а1 – а0 называется абсолютным сужением.
 - поперечная деформация или относительное сужение.
- поперечная деформация или относительное сужение.
Пуассон установил, что для изотропных материалов отношение поперечной деформации к продольной для каждого материала, есть величина постоянная, называемая коэффициентом Пуассона μ. Закон Пуассона записывается в виде
 или
или ![]() (2.4)
(2.4)
Минус в формуле стоит потому, что поперечная и продольная деформации разных знаков, а ![]() .
.
2.2. Экспериментальные методы
В сопротивлении материалов некоторые величины можно найти только экспериментальным путем. Неразрушающие методы испытаний чаще всего применяют для конструкций, а разрушающие - для материалов.
 Рассмотрим испытание на растяжение. Специально изготовленный образец из исследуемого материала крепится к захватам испытательной машины и растягивается. При испытаниях на растяжение происходит автоматическая запись диаграммы растяжения, связывающая удлинение образца
Рассмотрим испытание на растяжение. Специально изготовленный образец из исследуемого материала крепится к захватам испытательной машины и растягивается. При испытаниях на растяжение происходит автоматическая запись диаграммы растяжения, связывающая удлинение образца ![]() и растягивающую силу
и растягивающую силу![]() . Это диаграмма растяжения конкретного образца. Для получения диаграммы растяжения материала, из которого сделан образец, все абсциссы
. Это диаграмма растяжения конкретного образца. Для получения диаграммы растяжения материала, из которого сделан образец, все абсциссы ![]() делим на первоначальную длину
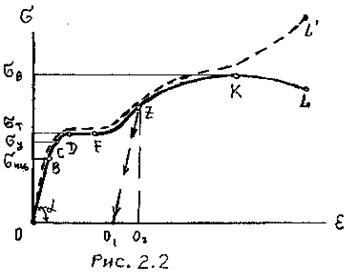
делим на первоначальную длину ![]() , а все ординаты N делим на первоначальную площадь сечения образца А. Получаем диаграмму ( рис. 2.2 ) в координатах
, а все ординаты N делим на первоначальную площадь сечения образца А. Получаем диаграмму ( рис. 2.2 ) в координатах
 и
и  .
.
Вид кривой не меняется, меняется только масштаб. Опишем характерные участки и точки диаграммы. Участок ОВ – прямая линия, деформации и напряжения прямо пропорциональны, то
есть на участке ОВ выполняется закон Гука  . Точке В диаграммы соответствует последнее (предельное) напряжение, при котором сохраняется прямая пропорциональность между напряжением и деформацией.
. Точке В диаграммы соответствует последнее (предельное) напряжение, при котором сохраняется прямая пропорциональность между напряжением и деформацией.
Напряжение, соответствующее этой точке, называется пределом пропорциональности ![]() .От точки В до точки С пропорциональность не выполняется, но материал остается упругим, то есть после снятия нагрузки диаграмма вернется в точку О.
.От точки В до точки С пропорциональность не выполняется, но материал остается упругим, то есть после снятия нагрузки диаграмма вернется в точку О.
В точке С упругость кончается и напряжение, соответствующее точке С, называется пределом упругости ![]() . Участок DF – горизонтальная прямая. Она называется площадкой текучести. От D до F материал “течет”, то есть деформируется без увеличения нагрузки. Если образец полированный, то на его поверхности можно увидеть линии Чернова – Людерса, расположенные под углом 450. Напряжение, соответствующее этой площадке, называется пределом текучести
. Участок DF – горизонтальная прямая. Она называется площадкой текучести. От D до F материал “течет”, то есть деформируется без увеличения нагрузки. Если образец полированный, то на его поверхности можно увидеть линии Чернова – Людерса, расположенные под углом 450. Напряжение, соответствующее этой площадке, называется пределом текучести ![]() . Далее FK – участок упрочнения. До точки К образец растягивался по длине и сужался по площади равномерно. Около точки К на образце появляется местное сужение, называемое шейкой, и в точке L образец разрушается. Напряжение, соответствующее точке К, называется временным сопротивлением
. Далее FK – участок упрочнения. До точки К образец растягивался по длине и сужался по площади равномерно. Около точки К на образце появляется местное сужение, называемое шейкой, и в точке L образец разрушается. Напряжение, соответствующее точке К, называется временным сопротивлением ![]() ( или пределом прочности
( или пределом прочности ![]() , что точно для материалов, разрушающихся без образования шейки ).
, что точно для материалов, разрушающихся без образования шейки ).
Если образец нагрузить до точки Z, а потом снять нагрузку, то диаграмма разгрузки представляет собой прямую линию параллельную ОВ. Полная деформация в точке Z равна ОО2=ε. Она состоит из упругой деформации О1О2 = ![]() и остаточной (пластической) деформации ОО1 =
и остаточной (пластической) деформации ОО1 = ![]() . Если разгруженный образец нагрузить снова, то его диаграмма растяжения опишется линией O1 Z K L. При этом увеличивается упругая зона, это явление называется наклепом и применяется в промышленности для тех изделий, у которых по характеру работы желательно, чтобы пластическая деформация была минимальна.
. Если разгруженный образец нагрузить снова, то его диаграмма растяжения опишется линией O1 Z K L. При этом увеличивается упругая зона, это явление называется наклепом и применяется в промышленности для тех изделий, у которых по характеру работы желательно, чтобы пластическая деформация была минимальна.
Величины ![]() – называют механическими характеристиками материала. При механических испытаниях материалов, получаются их механические характеристики. Технологическими пробами – называются испытания, дающие не объективные, а сравнительные характеристики материалов при строго регламентированных условиях.
– называют механическими характеристиками материала. При механических испытаниях материалов, получаются их механические характеристики. Технологическими пробами – называются испытания, дающие не объективные, а сравнительные характеристики материалов при строго регламентированных условиях.
При переходе от диаграммы с координатами  , к диаграмме в координатах
, к диаграмме в координатах ![]() , делим
, делим ![]() на первоначальную длину образца, а N делим на первоначальную площадь. Но в каждой момент времени при растяжении длина образца увеличивается, а площадь уменьшается. Если
на первоначальную длину образца, а N делим на первоначальную площадь. Но в каждой момент времени при растяжении длина образца увеличивается, а площадь уменьшается. Если ![]() делить на текущую длину образца, а N на текущую площадь, то получится истинная диаграмма растяжения, изображенная на рисунке штриховой линией. При сжатии диаграмма имеет точно такую же форму и характеристики, только пластичный материал будет сплющиваться, и постепенно его площадь увеличится так, что испытательные машины не смогут сжимать его дальше.
делить на текущую длину образца, а N на текущую площадь, то получится истинная диаграмма растяжения, изображенная на рисунке штриховой линией. При сжатии диаграмма имеет точно такую же форму и характеристики, только пластичный материал будет сплющиваться, и постепенно его площадь увеличится так, что испытательные машины не смогут сжимать его дальше.
Если в диаграмме растяжения или сжатия присутствуют площадки текучести, явно или не совсем явно выраженные, то такой материал называется пластичным. Материал, у которого площадки текучести нет, называется хрупким.
 При испытаниях конструкций и материалов используют тензометры – приборы, которые позволяет измерять изменение некоторого расстояния l0, называемого базой тензометра. Тензометры бывают: механические, оптические, электрические и другие.
При испытаниях конструкций и материалов используют тензометры – приборы, которые позволяет измерять изменение некоторого расстояния l0, называемого базой тензометра. Тензометры бывают: механические, оптические, электрические и другие.
Рис.2.3
Механические тензометры.
Схематически, механический тензометр рычажного типа (рис. 2.3 ) состоит из основы 2, на которой расположены неподвижная 3 и подвижная 4 опоры, а также шкала 5, соединенная с основой, стрелка 6, прикрепленная к подвижной опоре 4. Пока образец не нагружен, расстояние между неподвижной и подвижной опорами равняется l0. Если образец растягивать, то точка, в которой упирается подвижная пора, переместится вправо и подвижная опора повернется, повернется стрелка и на шкале увидим величину, соответствующую абсолютному удлинению образца на длину Δl0. Находим продольную деформацию ε = Δl0/l0 и напряжение σ =Е*ε. К такому типу относятся, например тензометр Гугенбергера и тензометр МИЛ, которые имеют многоступенчатую систему рычагов и позволяют получить достаточно большое увеличение.
В механических тензометрах Бояршинова и Морозова, схематически представленных на рис. 2.4, используются два индикатора часового типа для того, чтобы компенсировать возможный перекос частей станины.
Достоинства механических тензометров в том, что они достаточно простые, не требует дополнительных источников энергии, а недостатки их в том, что они имеет сравнительно большие размеры, не везде их можно
закрепить, надо находиться около них, чтобы снимать показания.
Оптический тензометр. Схематически устроен так же, как и механический тензометр рычажного типа, но вместо стрелки к подвижной опоре крепится зеркало, на которое направляется луч от источника света или лазера. При повороте опоры перемещается отраженный от зеркала луч. Шкала может располагаться далеко от зеркала, что повышает точность, но необходимы затемненные помещения и источник света.
Электрический тензометр сопротивления – тензорезистор.
 Это наиболее распространенный тензометр ( рис. Состоит из следующих элементов:
Это наиболее распространенный тензометр ( рис. Состоит из следующих элементов:
1) Подложки из полиэтилена или тонкой бумаги ;
2) Тонкой проволоки из материала с высоким удельным сопротивлением r, слабо зависящим от температуры;
3) Полосок из фольги;
4) Устройств для крепления проводов.
Электрический тензометр сопротивления наклеивают так, чтобы длинные витки проволоки были параллельны деформации. При растяжении, например, l растет, а A – уменьшается и меняется сопротивление проволоки ![]() Обычно изменение сопротивления проволоки измеряется с помощью мостиковой схемы, в которой используют компенсационный тензорезистор, то есть точно такой же тензорезистор, который приклеивается на такой же материал и находится рядом с рабочим тензорезистором для компенсации влияния температуры на удлинение материала.
Обычно изменение сопротивления проволоки измеряется с помощью мостиковой схемы, в которой используют компенсационный тензорезистор, то есть точно такой же тензорезистор, который приклеивается на такой же материал и находится рядом с рабочим тензорезистором для компенсации влияния температуры на удлинение материала.
Преимущества: малые размеры, средства измерения могут быть расположены вдали от датчика, высокая точность измерения.
Рассмотрим еще несколько неразрушающих методов испытаний.
Поляризационно-оптический метод исследования напряжений.
Если во всех предыдущих способах измерялась деформация, то при этом методе ( рис. 2.6 ) измеряются напряжения. Изготавливается модель детали из прозрачного оптически активного материала. Оптически активный материал меняет плоскость поляризации проходящего через него света при изменении напряжения в материале. Луч света содержит волны с различными плоскостями поляризации. После поляризатора остаются волны только с одной, например вертикальной, плоскостью поляризации. Если модель детали не нагружена, то проходя через нее, направление плоскости волны не меняется, а так как анализатор пропускает только волны с перпендикулярной анализатору, например, горизонтальной плоскостью поляризации, то экран будет темным, так как таких волн нет. Если модель детали нагрузить, то в каждой точке, в зависимости от напряжения, плоскость световой волны повернется, возникнут горизонтальные составляющие, которые пройдут через анализатор и экран в каждой точке будет  освещен с разной интенсивностью. Полученная картина обрабатывается на компьютере, и находятся напряжения в каждой точке модели.
освещен с разной интенсивностью. Полученная картина обрабатывается на компьютере, и находятся напряжения в каждой точке модели.
Метод хрупких лаковых покрытий Деталь покрывают лаком, который застывает. Застывший лак должен быть хрупким. Затем деталь нагружают, и лак растрескивается в тех местах, где возникают наибольшие деформции. Количественной оценки метод не дает, но показывает, в какие места и в каком направлении нужно клеить тензорезисторы. Если деталь работает на сжатие, то вначале деталь сжимают, потом покрывают хрупким лаком и после застывания лака деталь разгружают.
Метод муаровых полос. Если взять две достаточно частые сетки и наложить их друг на друга, то при взаимном их смещении возникнет картина, называемая муар. Одну сетку наносят на деталь, а другую оставляют в качестве основной. При деформировании, первая сетка смещается относительно второй, полученную картину муара фотографируют и обрабатывают на компьютере. Метод позволяет получить перемещения всех точек конструкции, на которые нанесена сетка.
Рентгеновский метод определения напряжений. В любом материале с помощью физических расчетов, можно абсолютно точно рассчитать расстояние между атомами для определенных плоскостей кристаллической решетки в данном конкретном кристалле. При действии нагрузки, расстояние между атомами меняется. Рентгеновский способ позволяет найти изменения расстояния. Поверхность детали облучают рентгеновскими лучами. Глубина облучения составляет 0,002 – 0.02 мм.
Анализ напряжений или деформаций основан на использовании дифракционного уравнения Брэгга nl = 2d sinq, где n – целое число – порядок дифракции, l - длина волны падающего рентгеновского луча, d – расстояние между плоскостями атомной решетки для данного материала, q - угол Брэгга – угол падения и дифракции. Изменение расстояния Dd между атомными плоскостями ведет к изменеиию угла Брэгга на Dq, так что деформацию решетки можно определить по формуле e = Dd/d = - (ctgq) Dq. Затем деформация решетки пересчитывается в напряжения.
Это неразрушающий метод, который позволяет найти абсолютные напряжения в материале, так как при применении остальных экспериментальных методов считают, что в начальный момент измерения напряжения в материале нет. На самом деле, возможно возникновение напряжения при изготовлении детали, при ее транспортировке и так далее.
Рентгеновский метод очень дорогой, требует рентгеновской установки, другого оборудования и весьма сложной обработки результатов. Для исследования более глубоких слоев материала приходится удалять поверхностные слои, например, шлифованием, от которого, в свою очередь, также возникают напряжения.
К неразрушающим методам можно еще отнести магнитный метод, который позволяет исследовать искажение магнитного поля в окрестности точки материала и по замеренной магнитной анизотропии определить напряжения в этой точке, а также ультразвуковые методы. Для анализа напряжений ультразвуковые волны поляризуются и процесс аналогичен поляризационно – оптическому методу. Также для обнаружения трещин в материале используются ультразвуковые дефектоскопы.
2.3. Предельные состояния. Коэффициент запаса
При работе конструкции из пластичных материалов чаще всего необходимо, чтобы максимальные напряжения в конструкции были меньше предела текучести ![]() , а у хрупких материалов максимальные напряжения должны быть меньше временного сопротивления
, а у хрупких материалов максимальные напряжения должны быть меньше временного сопротивления ![]() . Поэтому предельным состоянием для хрупких материалов считается разрушение, а для пластичных – текучесть и, соответственно, предельные напряжения для хрупких материалов
. Поэтому предельным состоянием для хрупких материалов считается разрушение, а для пластичных – текучесть и, соответственно, предельные напряжения для хрупких материалов ![]() , а для пластичных
, а для пластичных ![]() . Максимальные напряжения в конструкции должны быть меньше, чем предельные. Величина, показывающая во сколько раз максимальные напряжения в конструкции меньше предельных, называется коэффициентом запаса прочности
. Максимальные напряжения в конструкции должны быть меньше, чем предельные. Величина, показывающая во сколько раз максимальные напряжения в конструкции меньше предельных, называется коэффициентом запаса прочности
 ( 2.5 )
( 2.5 )
Для каждой конструкции из опыта эксплуатации задается некоторый нормативный коэффициент запаса прочности, который обозначается [n]. Его величина зависит от тех последствий, которые произойдут при потере работоспособности конструкции. В курсе “Сопротивление материалов” используется [n] = 1,5 – учебный коэффициент запаса. Действительный коэффициент запаса прочности конструкции должен быть равен нормативному, или быть больше его.
 , или
, или  . Величина
. Величина  называется допускаемым напряжением, тогда условие прочности по допускаемым напряжениям запишется
называется допускаемым напряжением, тогда условие прочности по допускаемым напряжениям запишется
![]() ( 2.6 )
( 2.6 )
В частности, при растяжении, при расчете по допускаемым напряжениям имеем  , откуда
, откуда  . Иногда для некоторых видов расчетов условие прочности по допускаемым напряжениям неприменимо ( продольно-поперечный изгиб ). Для них проводится расчет по допускаемым нагрузкам
. Иногда для некоторых видов расчетов условие прочности по допускаемым напряжениям неприменимо ( продольно-поперечный изгиб ). Для них проводится расчет по допускаемым нагрузкам  . Для некоторых конструкций, например, для точных приборов, кроме расчета на прочность проводится расчет еще и на жесткость, по допускаемым перемещениям
. Для некоторых конструкций, например, для точных приборов, кроме расчета на прочность проводится расчет еще и на жесткость, по допускаемым перемещениям  .
.
Здесь ![]() и
и ![]() - предельные нагрузка и перемещение.
- предельные нагрузка и перемещение.
2.4.Физические основы упругости и пластичности
На атомы материала действуют силы притяжения и отталкивания. Атомы располагаются на таких расстояниях друг от друга, на которых силы притяжения и отталкивания уравновешиваются. Такое расположение атомов образует кристаллическую решетку. Наиболее распространенными типами кристаллических решеток металлов являются кубические
( объемно - и гране - центрирированные ) и гексагональная плотноупакованная.
При действии сил происходит смещение одной части кристаллической решетки относительно другой ( рис. 2.7 ), называемое скольжением. Плоскость атомов (I, II) будет смещаться относительно плоскости атомов (III, IV). Если смещение I-I1 <![]() , то при снятии сил атом I1 будет
, то при снятии сил атом I1 будет  сильнее притягиваться к III атому, чем к IV и вернется на свое место I ( упругость). Если I-I1
сильнее притягиваться к III атому, чем к IV и вернется на свое место I ( упругость). Если I-I1![]() >
> ![]() , то он будет притягиваться к IV атому сильнее, чем к III, и без увеличения нагрузки сместится в положение II (пластичность, текучесть). Если теоретически рассчитать предельное напряжение для случая правильной кристаллической решетки, то они будут порядка модулей упругости.
, то он будет притягиваться к IV атому сильнее, чем к III, и без увеличения нагрузки сместится в положение II (пластичность, текучесть). Если теоретически рассчитать предельное напряжение для случая правильной кристаллической решетки, то они будут порядка модулей упругости. ![]() , практически же
, практически же
Рис.2.7  . Эта разница в сотни раз возникает из-за наличия дислокаций – погрешностей кристаллической решетки. Пусть, например, расстояние между Ш и IV атомами из-за дислокации уменьшилось, и слой с атомом I = II при меньшей нагрузке начнет скольжение. Так как кристаллы хаотично расположены в материале, то, сдвигаясь, линии скольжения упираются в границы кристаллитов и друг в друга, образуя неподвижные пороги. С нарастанием этого явления заканчивается текучесть и начинается участок упрочнения ( рис. 2.2).
. Эта разница в сотни раз возникает из-за наличия дислокаций – погрешностей кристаллической решетки. Пусть, например, расстояние между Ш и IV атомами из-за дислокации уменьшилось, и слой с атомом I = II при меньшей нагрузке начнет скольжение. Так как кристаллы хаотично расположены в материале, то, сдвигаясь, линии скольжения упираются в границы кристаллитов и друг в друга, образуя неподвижные пороги. С нарастанием этого явления заканчивается текучесть и начинается участок упрочнения ( рис. 2.2).
2.5. Концентрация напряжений
Отверстия, канавки, надрезы (рис. 2.8 ) и другие резкие изменения формы детали называют концентраторами напряжений. Они приводят к неравномерному распределению напряжений. Обычно максимальные значения напряжений возникают около концентраторов. Нарушение равномерного распределения напряжений имеет место в ограниченной зоне, поэтому напряжения в этой зоне называется местными.
Рис. 2.8 Рис. 2.9
Теоретический коэффициент концентрации  показывает, во сколько раз максимальное напряжение около концентратора больше номинального напряжения, вычисленного без учета нарушения равномерности распределения напряжений. Для растянутого стержня (рис. 2.8 )
показывает, во сколько раз максимальное напряжение около концентратора больше номинального напряжения, вычисленного без учета нарушения равномерности распределения напряжений. Для растянутого стержня (рис. 2.8 )  . Здесь Аmin – площадь поперечного сечения с учетом концентратора. aк – зависит от геометрии детали. Так, например, на рис. 2.9 показана зависимость aк от радиуса закругления при переходе от диаметра d стержня к диаметру D = 3d. Зависимость aк от R и D/d приведена в приложении 6. Для уменьшения величины aК скругляют углы и кромки, засверливают трещины, полируют изделия, особенно из высокопрочных закаленных сталей.
. Здесь Аmin – площадь поперечного сечения с учетом концентратора. aк – зависит от геометрии детали. Так, например, на рис. 2.9 показана зависимость aк от радиуса закругления при переходе от диаметра d стержня к диаметру D = 3d. Зависимость aк от R и D/d приведена в приложении 6. Для уменьшения величины aК скругляют углы и кромки, засверливают трещины, полируют изделия, особенно из высокопрочных закаленных сталей.
 Для учета и геометрии детали, и свойств материала вводят KS – эффективный коэффициент концентрации напряжений при статическом действии нагрузки.
Для учета и геометрии детали, и свойств материала вводят KS – эффективный коэффициент концентрации напряжений при статическом действии нагрузки.
где F – разрушающая нагрузка образца без концентратора напряжений, Fk - разрушающая нагрузка образца с концентратором напряжений.
Концентрация напряжений более опасна для хрупких материалов, чем для пластичных. Для пластичных опасны только острые надрезы и трещины. Для деталей из хрупкого материла надо снижать ![]() , или, что то же самое, увеличить коэффициента запаса в KS – раз. Для чугуна резкое изменение очертаний не очень опасно, так как, вследствие грубозернистой структуры материала, промежутки между зернами играют роль надрезов.
, или, что то же самое, увеличить коэффициента запаса в KS – раз. Для чугуна резкое изменение очертаний не очень опасно, так как, вследствие грубозернистой структуры материала, промежутки между зернами играют роль надрезов.
2.6. Контактные напряжения
Деформации и напряжения, возникающие при взаимном нажатии двух соприкасающихся тел, называют контактными. Возможны различные случаи контакта, изображенные на рис. 2.10 . Поверхность контакта ограничена эллипсом: ![]() , где А и В зависят от главных радиусов кривизны соприкасающихся тел ( это Rmax и Rmin в перпендикулярных плоскостях ), С – величина сближения тел от упругой деформации. Напряжения на площадке контакта распределяются по закону эллипса ( рис. 2.11 ) :
, где А и В зависят от главных радиусов кривизны соприкасающихся тел ( это Rmax и Rmin в перпендикулярных плоскостях ), С – величина сближения тел от упругой деформации. Напряжения на площадке контакта распределяются по закону эллипса ( рис. 2.11 ) :
![]() ,
, ![]() . Здесь F – сила, сжимающая, контактируемые тела. Полуоси эллипса зависят от отношения A/B. Выражая их через A/B, получим напряжение в центре эллипса
. Здесь F – сила, сжимающая, контактируемые тела. Полуоси эллипса зависят от отношения A/B. Выражая их через A/B, получим напряжение в центре эллипса ![]() . Здесь a зависит от A/B.
. Здесь a зависит от A/B.
A/B | 1 | 0,5 | 0,1 | 0,007 |
a | 0,388 | 0,490 | 0,970 | 3,202 |








Рис. 2.10
Условие прочности ![]() , где
, где ![]() - допускаемое контактное напряжение. Например, для шарикоподшипниковой стали:
- допускаемое контактное напряжение. Например, для шарикоподшипниковой стали:
![]() , для стали 3.
, для стали 3. ![]() , а
, а ![]() .
.
 Столь высокие напряжения, выдерживаемые материалами, имеют место потому, что материал работает в условиях, приближающихся к всестороннему сжатию. Опасная точка лежит на некоторой глубине контактирующих тел. По энергетическому критерию напряжения в ней:
Столь высокие напряжения, выдерживаемые материалами, имеют место потому, что материал работает в условиях, приближающихся к всестороннему сжатию. Опасная точка лежит на некоторой глубине контактирующих тел. По энергетическому критерию напряжения в ней:
![]() , где
, где 
Приведем величины зон контакта и максимальных напряжений для некоторых случаев контакта.
Рис. 2.11
В случае №1 радиус зоны контакта (круга) определится по формуле:
 . Здесь E1 и E2 – модули Юнга материалов контактирующих тел. При Е1=Е2=Е максимальные напряжения будут:
. Здесь E1 и E2 – модули Юнга материалов контактирующих тел. При Е1=Е2=Е максимальные напряжения будут:  .В случае №3
.В случае №3 ![]() :
:  ,
, .
.
.В случае №5 d2 отрицательно:. 
В случае №9 - ширина полосы контакта определяется по формуле:
![]() Здесь
Здесь ![]() .
.
Максимальные напряжения будут равны 
В случае №10  .
.  ,
,  .
.
2.7. Основы механики разрушения
Потеря несущей способности конструкции может произойти из - за образования шейки, текучести и возникновения при этом значительных деформаций, вследствие чего происходит заклинивание соприкасающихся деталей, а также при образовании и распространении трещины.
Разрушение в последнем случае – это сложный временной процесс, состоящий, как минимум из трех фаз.
1. Зарождение разрушения, образование первых ультрамикроскопических трещин и пор.
2. Развитие разрушения, рост трещин, объединение их, выход на края кристаллов, накопление повреждений.
3. Лавинообразный процесс разрушения.
На рис. 2.12 показаны три характерных типа трещины.

Тип 1 Тип П Тип Ш
Рис. 2.12
Впервые в 1913 году ученый исследовал разрушение на модели образца с эллиптическим отверстием, имитирующим трещину ( рис. 2Методами математической теории упругости он нашел максимальное напряжение в зоне концентратора – отверстия.
 , где
, где ![]() - длина трещины,
- длина трещины, ![]() - радиус закругления конца трещины.
- радиус закругления конца трещины.
У трещин величина ![]() очень мала, порядка
очень мала, порядка ![]() , так что
, так что ![]() велика, но для пластических материалов, за счет возникновения пластической зоны около края трещины, величина
велика, но для пластических материалов, за счет возникновения пластической зоны около края трещины, величина ![]() увеличивается.
увеличивается.
Однако от мелких трещин реальные сооружения не разрушаются, например, от небольших трещин стекло не раскалывается. Энергетический аспект проблемы в 1920 году рассмотрел Гриффитс. Каждое тело при действии нагрузки запасается упругой энергией. Резильянс - это способность тела запасать упругую энергию и не разрушаться при действии нагрузки. Упругая энергия разрушает сами тела. Для различных тел для их разрушения требуется различная энергия. Количество энергии, требуемая для разрушения материала, отнесенное к поперечному сечению образца, определяет его вязкость ( энергию или работу ) разрушения.
 Возьмем образец с небольшой начальной трещиной ( рис. 2.14 ), растянем его, после чего края жестко закрепим. К образцу энергия не подводится, то есть это замкнутая система, и рост трещины происходит за счет внутренней энергии. При возникновении трещины образуются две новые поверхности, на которые требуется затратить энергию, эта энергия порядка
Возьмем образец с небольшой начальной трещиной ( рис. 2.14 ), растянем его, после чего края жестко закрепим. К образцу энергия не подводится, то есть это замкнутая система, и рост трещины происходит за счет внутренней энергии. При возникновении трещины образуются две новые поверхности, на которые требуется затратить энергию, эта энергия порядка ![]() - представлена прямой 1 на рис. 2.15 . Освобождается энергия за счет уменьшения напряжений в областях около трещины, эта энергия порядка L2. Она изображена кривой 2 на рис. 2.15. Складываем ординаты линий 1 и 2 , построим кривую энергетического баланса – кривая 3 на рис. 2.15 . Если L меньше, чем критическая длина трещины LС, то требуется дополнительная энергия для развития трещины, так как количество освобождаемой энергии меньше, чем требуемой, а при L, равной, или больше LС, трещина растет сама, без добавления внешней энергии.
- представлена прямой 1 на рис. 2.15 . Освобождается энергия за счет уменьшения напряжений в областях около трещины, эта энергия порядка L2. Она изображена кривой 2 на рис. 2.15. Складываем ординаты линий 1 и 2 , построим кривую энергетического баланса – кривая 3 на рис. 2.15 . Если L меньше, чем критическая длина трещины LС, то требуется дополнительная энергия для развития трещины, так как количество освобождаемой энергии меньше, чем требуемой, а при L, равной, или больше LС, трещина растет сама, без добавления внешней энергии.
Критическая длина трещины равна ![]() ,
,
где ![]() - номинальное напряжение,
- номинальное напряжение, ![]() - вязкость или работа разрушения.
- вязкость или работа разрушения.
Хотя у высокопрочных сталей предел прочности достаточно высок, но длина критической трещины в 10-100 раз меньше, чем у мягких сталей за счет значительно меньшей величины W и большей величины ![]() . Поэтому, крупные детали из высокопрочных сталей не делают. В настоящее время при проектировании конструкций стараются сделать так, чтобы они были не только прочными, но и не разрушались при трещинах достаточной длины.
. Поэтому, крупные детали из высокопрочных сталей не делают. В настоящее время при проектировании конструкций стараются сделать так, чтобы они были не только прочными, но и не разрушались при трещинах достаточной длины.
Для определения вязкости разрушения применяют маятниковые копры. Вокруг оси в виде маятника может вращаться груз, называемый бойком. Маятник поднимают и фиксируют высоту его подъема. Внизу на пути бойка, устанавливают образец из исследуемого материала с заранее изготовленной трещиной ( надрезом ). После удара бойка образец разрушается, и боек поднимается на высоту меньшую, чем первоначальная высота его подъема. Зная высоту первоначальную и конечную, а также вес бойка, можно вычислить работу, затраченную на разрушение образца, и разделив ее на площадь в месте разрушения, получим вязкость разрушения W.
2.8. Статически неопределимые системы и их расчет
Если все внутренние силы в конструкции можно найти с помощью одних только уравнений равновесия статики, то такие конструкции или системы называются статически определимыми системами, а если нельзя – то статически неопределимыми.
Расчет статически неопределимой системы рассмотрим на примере.
Абсолютно жесткий брус, нагруженный силой Q, опирается на шарнирно-неподвижную опору и прикреплен к двум стержням при помощи шарниров (рис. 2Требуется найти усилия и напряжения в стержнях. Используем метод сечений ( рис. 2Заданная система является один раз статически неопределимой, так как возникающие опорные реакции RО и НО, а также продольные силы N1 и N2 в стержнях, не могут быть определены из трех уравнений равновесия статики. Уравнение равновесия отсеченной части, изображенной на рис.2.17 , имеет вид
 ( 2.7 )
( 2.7 )
Составлять уравнения  и
и  не имеет смысла, так как в них войдут не интересующие нас реакции опоры О ( RО, НО ). Необходимо составить одно дополнительное уравнение - уравнение перемещений. Для этого рассмотрим деформацию системы. Под действием нагрузки Q абсолютно жесткий брус ВО, оставаясь прямым, повернется вокруг шарнира О и займет положение В1О (рис.2.18).
не имеет смысла, так как в них войдут не интересующие нас реакции опоры О ( RО, НО ). Необходимо составить одно дополнительное уравнение - уравнение перемещений. Для этого рассмотрим деформацию системы. Под действием нагрузки Q абсолютно жесткий брус ВО, оставаясь прямым, повернется вокруг шарнира О и займет положение В1О (рис.2.18).
Рис. .2.16 Рис.2.17
Точка В опишет дугу, которую по малости угла В1ОВ заменим прямой ![]() . Так как упругие деформации малы по сравнению с длинами стержней, то считаем, что угол CB1D приблизительно равен углу CBD и равен a. Удлинения стержней 1 и 2 равны
. Так как упругие деформации малы по сравнению с длинами стержней, то считаем, что угол CB1D приблизительно равен углу CBD и равен a. Удлинения стержней 1 и 2 равны ![]() = В1К и
= В1К и ![]() = ВВ1. Удлинение стержня 1 (
= ВВ1. Удлинение стержня 1 (![]() ) получаем на чертеже, опустив перпендикуляр ВK из точки В на CВ1 (положение стержня 1 после деформации ).
) получаем на чертеже, опустив перпендикуляр ВK из точки В на CВ1 (положение стержня 1 после деформации ).  .
.
Или ![]()
![]()
![]() - это дополнительное уравнение перемещений.
- это дополнительное уравнение перемещений.
На основании закона Гука
 ,
, 
и уравнение перемещений запишется
.
Рис.2.18  ( 2.8 )
( 2.8 )
Здесь  - длина стержня 1; l2 = в – длина стержня 2. Сокращая на величину в, получим
- длина стержня 1; l2 = в – длина стержня 2. Сокращая на величину в, получим  , выражение подставляем в ( 2.7 ) и находим N1 и N2, а, затем и напряжения
, выражение подставляем в ( 2.7 ) и находим N1 и N2, а, затем и напряжения  .
.
Одним из свойств статически неопределимых систем является то, что на элементы с большой жесткостью приходится большая часть нагрузки.
При изменении температуры в статически неопределимых системах возникают температурные напряжения. Рассмотрим пример статически неопределимой системы, подверженной температурному воздействию.
Пусть стержень, изготовленный из материала с модулем Юнга - Е и коэффициентом линейного расширения α, при температуре Т0 , заделывают в неподатливые стены. Затем температура меняется до Т1. Найти усилие и 
 напряжение в стержне.
напряжение в стержне.
а б в
Рис.2.19
При нагревании брус давит на опоры, и в них возникают реакции ( рис 2.19,а ). ![]()
![]()
![]() . Уравнение одно, а неизвестных два, поэтому задача является статически неопределимой. Составим дополнительное уравнение перемещений. Для этого превратим статически неопределимую систему в статически определимую. Отбросим одну из опор, например С, а неизвестную реакцию RC обозначим через Х (рис. 2.19,б ). Используем метод сечений ( рис. 2.19,в ) и найдем, что
. Уравнение одно, а неизвестных два, поэтому задача является статически неопределимой. Составим дополнительное уравнение перемещений. Для этого превратим статически неопределимую систему в статически определимую. Отбросим одну из опор, например С, а неизвестную реакцию RC обозначим через Х (рис. 2.19,б ). Используем метод сечений ( рис. 2.19,в ) и найдем, что  ;
;  ;
;  . От силы N удлинение бруса вычисляется по закону Гука
. От силы N удлинение бруса вычисляется по закону Гука  . Удлинение бруса от действия температуры равно
. Удлинение бруса от действия температуры равно ![]() . Полное удлинение бруса будет
. Полное удлинение бруса будет  . Так как брус зажат в неподатливые стенки, то полное удлинение его равно нулю.
. Так как брус зажат в неподатливые стенки, то полное удлинение его равно нулю.  – это дополнительное уравнение перемещений.
– это дополнительное уравнение перемещений.
 , сокращаем на
, сокращаем на ![]() и получим
и получим  .
.
Температурное напряжение ![]() . Здесь
. Здесь![]() =
= . Из этого выражения видно, что напряжения не зависят от площади, то есть уменьшить напряжение, увеличивая площадь нельзя.
. Из этого выражения видно, что напряжения не зависят от площади, то есть уменьшить напряжение, увеличивая площадь нельзя.
 При погрешностях изготовления элементов статически неопределимых систем возникают монтажные напряжения. Если в статически определимой системе один из ее элементов сделать не точного размера, то при монтаже напряжение и усилие в ней не возникнет, изменится только ее геометрия ( рис. 2.20,а ). В статически
При погрешностях изготовления элементов статически неопределимых систем возникают монтажные напряжения. Если в статически определимой системе один из ее элементов сделать не точного размера, то при монтаже напряжение и усилие в ней не возникнет, изменится только ее геометрия ( рис. 2.20,а ). В статически
неопределимых системах, а б
например, если средний Рис. 2.20
стержень выполнен короче, чем нужно ( рис. 2.20,б ), то для монтажа конструкции в точке соединения трех стержней необходимо два крайних стержня сжать, а средний растянуть, и в таком положении конструкцию монтируют. При этом в конструкции без приложения нагрузки средний стержень окажется растянутым, а крайние - сжатыми. Такая конструкция называется предварительно напряженной, а напряжения в ней называются монтажными. Часто такие конструкции делаются специально, например, предварительно напряженный железобетон
. Таким образом, в статически определимых системах усилия и напряжения возникают только от действия нагрузки, а в статически неопределимых системах как от действия нагрузки, так и от изменения температуры и неточности монтажа.
2.9. Растяжение под действием собственного веса
Рассмотрим стержень, закрепленный верхним концом и растягиваемый собственным весом. Длина стержня l, площадь поперечного сечения А, модуль Юнга и удельный вес материала стержня – Е и ![]() ( рис. 2.21 ).
( рис. 2.21 ).
Рис. 2.21 Рис. 2.22
Используем метод сечений ( рис. 2 ( вес участка стержня длиной z ).
( вес участка стержня длиной z ). ![]()
![]() ,
, ![]() .
.
Так как зависимость N от z линейная, то эпюра N изображается прямой линией. Чтобы построить прямую линию, нужны две точки.
![]() ;
; ![]() ;
; ![]() - это вес всего стержня.
- это вес всего стержня.
Эпюра напряжений ![]() - прямая :
- прямая : ![]() ,
, ![]() . Найдем перемещения сечений стержня. По закону Гука при N=const абсолютное удлинение будет
. Найдем перемещения сечений стержня. По закону Гука при N=const абсолютное удлинение будет  . Так как у нас N ≠ const, то применим закон Гука для участка длиной dz, на котором можно считать, вследствие его малости, что N(z) ≈ const. Абсолютное удлинение этого участка
. Так как у нас N ≠ const, то применим закон Гука для участка длиной dz, на котором можно считать, вследствие его малости, что N(z) ≈ const. Абсолютное удлинение этого участка ![]() . Сечение I-I переместится на величину, равную сумме абсолютных удлинений всех участков dz , расположенных выше сечения I-I :
. Сечение I-I переместится на величину, равную сумме абсолютных удлинений всех участков dz , расположенных выше сечения I-I :
 Это уравнение параболы. Для построения эпюры
Это уравнение параболы. Для построения эпюры ![]() нужны три точки.
нужны три точки.
 .
. ![]() .
.  .
.
Если подобрать сечение стержня под действием собственного веса, то в формуле ![]() используется
используется ![]() :
: ![]() . В остальных точках эта площадь оказывается излишней, так как N уменьшается, поэтому с точки зрения оптимального проектирования желательно применять стержни переменного поперечного сечения.
. В остальных точках эта площадь оказывается излишней, так как N уменьшается, поэтому с точки зрения оптимального проектирования желательно применять стержни переменного поперечного сечения.
2.10. Потенциальная энергия деформации при растяжении - сжатии
 При действии внешней растягивающей силы образец растягивается, и внешняя сила перемещается, при этом совершая работу. На каждом участке действует сила N. Пусть N постоянна на участке стержня. Работа совершается силой N на перемещении
При действии внешней растягивающей силы образец растягивается, и внешняя сила перемещается, при этом совершая работу. На каждом участке действует сила N. Пусть N постоянна на участке стержня. Работа совершается силой N на перемещении![]() :
:
 . Коэффициент ½ возникает потому, что работа равна определенному интегралу, взятому по траектории движения, или площади, расположенный под линией траектории ( рис. 2Работа внешней силы Рис. 2.23
. Коэффициент ½ возникает потому, что работа равна определенному интегралу, взятому по траектории движения, или площади, расположенный под линией траектории ( рис. 2Работа внешней силы Рис. 2.23
переходит в тепловую энергию - нагрев образца, и в потенциальную энергию деформации. Пренебрегая затратами на тепловую энергию, в дальнейшем будем считать, что работа внешних сил полностью переходит в потенциальную энергию деформации.
![]() . Если N = N ( z ), то
. Если N = N ( z ), то  ( 2.9 )
( 2.9 )
Удельная потенциальная энергии деформации u – это потенциальная энергии деформации единицы объема материала. Объем равен V= Al.

3. ТЕОРИИ НАПРЯЖЕННОГО
И ДЕФОРМИРОВАННОГО СОСТОЯНИЯ
3.1. Напряженное состояние в точке
Вырежем из напряженного тела произвольной бесконечно малый параллелепипед ( рис. На гранях параллелепипеда действуют нормальные и касательные напряжения. Направление нормальных напряжений совпадает с направлением внешней нормали ![]() . Касательные напряжения разложим на составляющие, параллельные осям. На невидимых гранях элемента возникают такие же напряжения, только противоположно направленные. Напряжения на гранях параллелепипеда
. Касательные напряжения разложим на составляющие, параллельные осям. На невидимых гранях элемента возникают такие же напряжения, только противоположно направленные. Напряжения на гранях параллелепипеда
являются компонента ми тензора напряжений – Т.
Параллелепипед находится в равновесии, выполняются все уравнения равновесия, в частности, SМх=0 . tzydxdydz - tyzdzdxdy=0. Откуда: tzy=tyz. Аналогично tzx=txz, txy=tyx. Эти выражения представляют собой закон парности касательных напряжений. Из закона парности касательных напряжений следует, что на гранях элемента имеем не девять, а шесть независимых компонентов тензора напряжений. При вращении параллелепипеда величины напряжений меняются. Можно добиться такого положения параллелепипеда, при котором все касательные напряжения обратятся в ноль. Грани параллелепипеда, находящиеся в этом положении, называются главными площадками, а нормальные напряжения, действующие на них, называются главными напряжениями, которые обозначаются s1, s2 и s3, причем s1³s2³s3.
Если два главных напряжения равны нулю, то напряженное состояние называется линейным или простым. При этом, если s1¹0, то это растяжение, а если s3¹0, то это сжатие. Если одно главное напряжение равно нулю, то напряженное состояние называется плоским, если все главные напряжения не равны нулю, то объемным. Плоское и объемное напряженные состояния называются сложными.
3.2. Напряжение на наклонных площадках при линейном напряженном состоянии
 Пусть материал испытывает линейное напряженное состояние: s1¹0, s2=0, s3=0. Найдем напряжения на площадке, нормаль к которой составляет угол a с нормалью к главной площадке, где действует s1 ( рис. 3.2,а ). Площадь главной площадки обозначим А0, а площадь наклонной площадки - Аa.
Пусть материал испытывает линейное напряженное состояние: s1¹0, s2=0, s3=0. Найдем напряжения на площадке, нормаль к которой составляет угол a с нормалью к главной площадке, где действует s1 ( рис. 3.2,а ). Площадь главной площадки обозначим А0, а площадь наклонной площадки - Аa.
 ,
,
или ![]() .
.
Напряжение ![]() найдем из условия равновесия
найдем из условия равновесия ![]() (рис. 3.2,б).
(рис. 3.2,б).  .
.
Разложим pa на sa и ta ( рис. 3.2,в ).
![]()
![]()
Экстремальные значения напряжений будут:  при a=0°;
при a=0°;  при a=90°;
при a=90°;  при a=±45°.
при a=±45°.
3.3. Плоское напряженное состояние
Рассмотрим элемент, материал которого испытывает плоское напряженное состояние ( рис.Разберем две задачи – прямую и обратную. В прямой задаче гранями рассматриваемого элемента являются главные площадки. Известны s1¹0, s2¹0, s3=0. и углы a и b=a+90° наклона произвольных площадок к главной, на которой действует s1. Требуется определить напряжения sa и ta и sb и tb на произвольных площадках. В обратной задаче известны напряжения sa, sb, ta и tb на двух взаимно перпендикулярных произвольных площадках. Требуется определить положение главных площадок и величины главных напряжений.
Прямая задача. Используем принцип суперпозиции и формулу ( Найдем напряжения на первой произвольной площадке
sa=s1cos2a+s2cos2(90°+a) = s1cos2a+s2sin2a, ( 3.3 )
 ta =
ta = sin2a
sin2a
Отметим, что в прямой задаче положительный угол a откладывается от нормали к главной площадке, где действует s1, против часовой стрелки.
Экстремальные значения напряжений будут: mах sa=s1 при a=0°; min sa=s2 при a=90°;
mах ta= при a=45°.
при a=45°.
Для определения напряжений на второй произвольной площадке используем формулы ( 3.3 ) и ( 3.4 ),
в которые подставим угол b

= 

Из сравнения ( 3.4 ) и ( 3.6 ) видно, что ta= - tb - это частный случай закона парности касательных напряжений для плоского напряженного состояния.
Обратная задача. Для нахождения положения главных площадок найдем угол a=a0 наклона главной площадки к произвольной. Вычтем из
sa ( 3.3 ) sb ( 3.5 ) ![]() ,
,
Откуда  ( * ) , а из ( 3.4 ) найдем
( * ) , а из ( 3.4 ) найдем  . Получим
. Получим 
По этой формуле определяется положение главных площадок.
Найдем величины главных напряжений. Сложим формулы ( 3.3 ) и ( 3.5 ).
![]() .
.
Из ( * ) следует, что  .
.
Складывая и вычитая эти выражения, получим

 =
= .
.
Откуда  ; s3=
; s3=
3.4. Обобщенный закон Гука
 Вырежем из тела элементарный парал-лелепипед, гранями которого являются главные площадки ( рис. Обозначим ребра параллельные s1 первыми, параллельные s2 – вторыми, параллельные s3 – третьими.
Вырежем из тела элементарный парал-лелепипед, гранями которого являются главные площадки ( рис. Обозначим ребра параллельные s1 первыми, параллельные s2 – вторыми, параллельные s3 – третьими.
Рассмотрим деформацию первого ребра. В нем от s1 возникает продольная деформация  , а от s2 и s3 – поперечные деформации
, а от s2 и s3 – поперечные деформации  ;
;  .
.
Полные деформации первого ребра, и аналогично второго и третьего ребер будут
e1 =  ,
,
e2 = ![]() , e3 =
, e3 = ![]()
Эти выражения представляют собой обобщенный закон Гука.
Складывая их, найдем относительное изменение объема.
 , здесь
, здесь  - модуль объемной деформации.
- модуль объемной деформации.
Если материал испытывает всестороннее сжатие, то s1 = s2 = s3= - p. Тогда ![]() . Так как объем в этом случае расти не может, то это возможно, если 1-2m>0, или m £ 0.5. Это предельное значение m для изотропных материалов.
. Так как объем в этом случае расти не может, то это возможно, если 1-2m>0, или m £ 0.5. Это предельное значение m для изотропных материалов.
3.5. Критерии прочности и пластичности
В случае простого напряженного состояния легко определить предельное напряженное состояние – текучесть для пластичных материалов и разрушение для хрупких. Соответственно находятся предельные напряжения sТ и sВ, зная которые, можно найти коэффициент запаса прочности конструкции. При сдвиге тоже можно определить характерные напряжения по диаграмме сдвига. При сложном напряженном состоянии предельное напряженное состояние зависит от комбинации компонент тензора напряжений, и определение предельных напряжений для каждого случая сложно и дорого. Поэтому содержание теории предельных напряженных состояний заключается в создании общего метода оценки меры опасности любого напряженного состояния при ограниченном числе механических испытаний материала. Каждому сложному напряженному состоянию ( рис. 3.5,а ) ставится в соответствие равноопасное ему простое напряженное состояние с эквивалентным напряжением sэкв ( рис. 3.5,б ). Равноопасными состояниями называются такие, все компоненты которых надо увеличить в одно и то же число раз ( равное коэффициенту запаса прочности ) для достижения напряженным состоянием предельного состояния.
Критериями прочности и пластичности являются математические модели - уравнения, основанные на теоретических рассуждениях и экспериментальных данных и связывающие сложное напряженное состояние с равноопасным ему простым напряженным состоянием.
Рассмотрим некоторые наиболее распространенные критерии.
I. Критерий наибольших нормальных напряжений. Считается, что на достижение напряженным состоянием предельного состояния основное влияние оказывает наибольшее по абсолютной величине нормальное напряжение. sэквI = s1 или sэквI =| s3 | . Данный критерий имеет, в основном, историческое значение, и на практике не применяется.
II. Критерий наибольших относительных деформаций. Считается, что на достижение напряженным состоянием предельного состояния основное влияние оказывает наибольшая по абсолютной величине относительная деформация. Так как sэквII = Е eэквп, а eэквп = max { | e1 | , | e3 | } , то
sэквII = s1 - m(s2+s3) или sэквII![]() . Этот критерий применяется редко и только для хрупких материалов.
. Этот критерий применяется редко и только для хрупких материалов.
II1. Критерии наибольших касательных напряжений. Считается, что на достижение напряженным состоянием предельного состояния основное влияние оказывает наибольшее по абсолютной величине касательное напряжение. Так как  - в заданном напряженном состоянии, а
- в заданном напряженном состоянии, а ![]() - в эквивалентном напряженном состоянии, то
- в эквивалентном напряженном состоянии, то
![]() ( 3.10 )
( 3.10 )
Используется для пластичных материалов. Однако для материалов с различными механическими характеристикам на растяжении и сжатии, этот критерий приводит к погрешностям.
IV. Критерии энергии формоизменения. Считается, что на достижение напряженным состоянием предельного состояния основное влияние оказывает энергия формоизменения. Энергию, затраченную на изменение объема, не учитываем, так как, например, при гидростатическом сжатии, потенциальная энергия растет, а материал не течет. Формула для эквивалентного напряженного состояния будет:
 ,
,
или 
Этот критерий применяется наравне с критерием наибольших касательных напряжений для пластичных материалов
V. Теория Мора предельных напряжений. Испытывая образцы из одного и того же материала при различных напряженных состояниях и
