

Таким образом, мы приходим к системе двух уравнений с двумя переменными:
Математическая модель задачи составлена.
Имеем
Получим
Заменим этим уравнением второе уравнение системы (1):

Система (2) несколько проще, чем система (1), ее можно решить методом подстановки. Выразим у через х из второго уравнения системы
![]()
Подставим это выражение вместо у в первое уравнение системы (2):
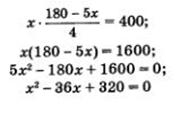
(обе части предыдущего уравнения почленно разделили на 5); ![]()
Так как ![]() то получаем: если х = 20, то у = 20; если x = 16, то у = 25.
то получаем: если х = 20, то у = 20; если x = 16, то у = 25.
Итак, система (2), а с ней и система (1) имеют два решения: (20; 20) и (16; 25).
Опираясь на полученные решения системы, мы должны проанализировать две возможности: либо в кинотеатре «Факел» 20 рядов по 20 мест в каждом ряду, либо 16 рядов по 25 мест в каждом ряду. Если выбрать первую возможность, то в кинотеатре «Слава» будет 24 ряда (по условию, там на 4 ряда больше) по 25 мест в каждом ряду (по условию, в каждом ряду «Славы» на 5 мест больше, чем в «Факеле»). Это нас не устраивает, поскольку, по условию, в каждом ряду «Славы» более 25 мест.
Рассмотрим вторую возможность: в «Факеле» 16 рядов по 25 мест в каждом. Тогда в «Славе» будет 20 рядов по 30 мест в каждом. Это нас устраивает.
Ответ: 16 рядов.
Второй вариант:
Получаем уравнение ![]() Это математическая модель задачи.
Это математическая модель задачи.
Сравним два варианта решения задачи. В первом варианте была более сложная математическая модель (система уравнений), значит, более трудным был второй этап — работа с составленной моделью. Зато менее трудным был первый этап, сама математическая модель была составлена легче и быстрее. Поскольку первый этап, где больше творчества, сложнее, чем второй (технический), то часто предпочтительнее упрощать именно этап составления модели, т. е. работать с двумя переменными.
Пример 2.
Пристани В и С находятся ниже пристани А по течению реки соответственно на 30 км и 45 км (рис. 41). Моторная лодка отходит от пристани А, доходит до С, сразу поворачивает назад и приходит в В, затратив на весь путь 4 ч 40 мин. В другой раз эта же лодка отошла от пристани С, дошла до А, сразу повернула назад и пришла в В, затратив на весь путь 7 ч. Чему равны собственная скорость лодки и скорость течения реки?
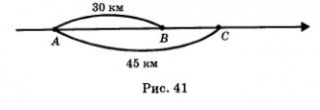
Составление математической модели. Введем две переменные: х км/ч — собственная скорость лодки, у км/ч — скорость течения реки. Тогда х + у км/ч — скорость движения лодки по течению реки, х-у км/ч — скорость движения лодки против течения реки. Рассмотрим первый рейс лодки. Он составил 45 км по течению и 15 км против течения. Имеем: ![]() — время движения лодки от А до С (в первом рейсе),
— время движения лодки от А до С (в первом рейсе), ![]() время движения лодки от С до В (в первом рейсе). Всего на первый рейс лодка затратила 4 ч 40 мин, т. е.
время движения лодки от С до В (в первом рейсе). Всего на первый рейс лодка затратила 4 ч 40 мин, т. е. ![]()
Таким образом, получаем уравнение![]() Рассмотрим второй рейс лодки. Он составил 45 км против течения и 30 км по течению. Имеем:
Рассмотрим второй рейс лодки. Он составил 45 км против течения и 30 км по течению. Имеем:  время движения лодки от С до А (во втором рейсе),
время движения лодки от С до А (во втором рейсе), ![]() время движения лодки от А до В (во втором рейсе). Всего на второй рейс лодка затратила 7 ч. Таким образом, получаем уравнение
время движения лодки от А до В (во втором рейсе). Всего на второй рейс лодка затратила 7 ч. Таким образом, получаем уравнение ![]()
Математическая модель задачи представляет собой систему двух уравнений с двумя переменными: 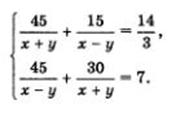
Для решения системы уравнений воспользуемся методом введения новых переменных. Положим: 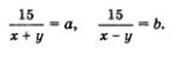 Тогда система примет вид
Тогда система примет вид 
Решив эту систему двух линейных уравнений с двумя переменными а и Ь (сделайте это!), получим ![]()
Итак,

Остается решить совсем простую систему уравнений
Получаем х = 12, у = 3.
Требуется определить скорость лодки в стоячей воде и скорость течения реки. Первую скорость мы обозначили буквой х, получили х = 12; значит, собственная скорость лодки составляет 12 км/ч. Скорость течения мы обозначили буквой у, получили у = 3. Значит, скорость течения реки составляет 3 км/ч.
Ответ: 12 км/ч; 3 км/ч.
Пример 3.
Мастер и его ученик планировали сообща выполнить некоторую работу за 6 дней. Сначала за дело взялся ученик. Выполнив 20% задания, он заболел. Остальная работа пришлась на долю мастера. В итоге выполнение задания растянулось на 11 дней. За сколько дней мог бы его выполнить мастер и за сколько дней ученик, действуя в одиночку, если известно, что и то и другое количество дней выражаются целыми числами?
Составление математической модели.
Если речь идет о выполнении некоторой работы, не охарактеризованной в количественном плане (т. е. не сказано, сколько деталей надо сделать, сколько кубометров земли вынуть и т. д.), то объем работы считают равным 1, а части работы выражают в долях единицы. Пусть х — число дней, необходимых мастеру, чтобы выполнить в одиночку всю работу, а у — число дней, необходимых ученику, чтобы справиться в одиночку со всей работой. Если объем всей работы (т. е. 1) разделить на число дней, то узнаем долю работы, выполняемую за 1 день.
Итак, ![]() — доля работы, которую выполняет мастер за 1 день,
— доля работы, которую выполняет мастер за 1 день, ![]() доля работы, которую выполняет ученик за 1 день.
доля работы, которую выполняет ученик за 1 день.
По условию, работая вместе, мастер и ученик могли бы выполнить всю работу за 6 дней. Доля работы мастера за 6 дней выражается формулой — ![]() Доля работы ученика за 6 дней выражается формулой
Доля работы ученика за 6 дней выражается формулой![]() Поскольку вместе они выполнят всю работу (т. е. 1), составляем уравнение
Поскольку вместе они выполнят всю работу (т. е. 1), составляем уравнение 
По условию, ученик выполнил, трудясь в одиночку до своей болезни, 20% задания, т. е. ![]() часть всей работы. Сколько времени он потратил? Естественно, что
часть всей работы. Сколько времени он потратил? Естественно, что ![]() часть того времени, которое нужно ему на выполнение всей работы, т. е.
часть того времени, которое нужно ему на выполнение всей работы, т. е. ![]() дней. Потом пришел мастер, сделал оставшуюся работу, т. е.
дней. Потом пришел мастер, сделал оставшуюся работу, т. е. ![]() задания, на что затратил
задания, на что затратил ![]() дней. По условию, выполнение задания растянулось на 11 дней, т. е.
дней. По условию, выполнение задания растянулось на 11 дней, т. е. 
Таким образом, математическая модель задачи составлена — система двух уравнений с двумя переменными 
Воспользуемся методом подстановки. Выразим у через х из второго уравнения системы: у = 55-4x. Подставим выражение 55-4x вместо у в первое уравнение системы:  Решая это рациональное уравнение, последовательно получаем:
Решая это рациональное уравнение, последовательно получаем:

Оба найденных значения удовлетворяют условию ![]() т. е. являются корнями рационального уравнения с переменной х. Осталось найти соответствующие значения у. Для этого воспользуемся уравнением y =x. Если х = 10, то из этого уравнения находим у = 15; если
т. е. являются корнями рационального уравнения с переменной х. Осталось найти соответствующие значения у. Для этого воспользуемся уравнением y =x. Если х = 10, то из этого уравнения находим у = 15; если ![]() то из того же уравнения находим у = 22. Итак, составленная система уравнений имеет два решения:
то из того же уравнения находим у = 22. Итак, составленная система уравнений имеет два решения:
![]()
По условию, количество дней, необходимых как мастеру, так и ученику для выполнения в одиночку всего задания, выражается целым числом. Значит, пара ![]() нас не устраивает. Остается лишь одна возможность: х = 10, у = 15.
нас не устраивает. Остается лишь одна возможность: х = 10, у = 15.
О т в е т: 10 дней; 15 дней.
Лекция №10. Уравнение энергии.
Для его получения используем упрощенную схему: будем рассматривать изменение внутренней энергии фиксированной массы газа dm за короткий промежуток времени dt. Так как по сделанным допущениям в веществе отсутствует теплопроводность, вязкость и источники (стоки) энергии, то это изменение вызывается лишь работой сил давления на гранях кубика при его сжатии или расширении.
Работа давления, связанная с движением граней объема вдоль оси ![]() , очевидно, равна
, очевидно, равна
где слагаемые в скобках можно, отбрасывая члены второго порядка малости, переписать через производую ![]() и получить
и получить
Здесь р среднее давление в элементарном объеме. Аналогично,
Полная работа, совершенная над газом за время dt, есть
![]() ..
..
Она равна изменению внутренней энергии объема, т. е.
![]() ,
,
![]() - удельная внутренняя энергия. Приравняв оба выражения для dA и устремив к нулю dt, окончательно получим
- удельная внутренняя энергия. Приравняв оба выражения для dA и устремив к нулю dt, окончательно получим
![]() (14)
(14)
где ![]() — полная (субстанциональная) производная внутренней энсргии по времени.
— полная (субстанциональная) производная внутренней энсргии по времени.
Заметим, что с помощью уравнений неразрывности и движения уравнение (14) приводится, подобно (4), к дивергентному виду
 (15)
(15)
Слева в (15) стоит производная от полной (внутренней и кинетической) энергии газа в данной точке пространства.
Так как термодинамические свойства вещества предполагаются известными, то ![]() — известная функция уже введенных величин
— известная функция уже введенных величин ![]() и
и ![]() , и уравнение (14) либо (15) дает недостающую связь для определения искомых газодинамических величин.
, и уравнение (14) либо (15) дает недостающую связь для определения искомых газодинамических величин.
Лекция №11. Особенности моделей газовой динамики.
Для их получения применим второй закон Ньютона к элементарной жидкой частиц, имеющей в некоторый момент t форму кубика с гранями dx, dy, dz .
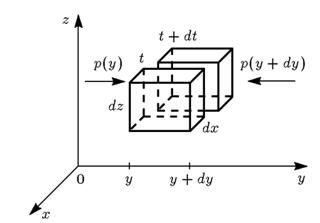
Жидкая частица — это перемещающийся в пространстве и ме няющий свою форму объем, содержащий в разные моменты времени t одни и те же атомы и молекулы газа. Тем самым его масса dm постоянна. Для простоты вывода будем считать, что за короткое время dt кубик не меняет своей формы и смещается по всем направлениям на расстояние, много меньшее его размеров.
Определим сначала силу, действующую на кубик, например в направлении оси у. Она, очевидно, равна разности давлений на левой и правой гранях, умноженной на их площади (иных сил по предположению нет):
![]()
Сила ![]() равна ускорению жидкой частицы в направлении у. умноженному на ее массу
равна ускорению жидкой частицы в направлении у. умноженному на ее массу ![]() :
:
![]() (5)
(5)
Заменяя в первом выражении для ![]() разность давлений через производную от давления по у и приравнивая его к (5), приходим к уравнению, описывающему движение газа вдоль оси у:
разность давлений через производную от давления по у и приравнивая его к (5), приходим к уравнению, описывающему движение газа вдоль оси у:
![]() (6)
(6)
Точно так же получаем уравнения движения по направлениям х, z:
![]() (7)
(7)
![]() (8)
(8)
имеющие, как и (6). очевидный физический смысл. В векторной форме уравнения (6)-(8) имеют вид
![]() . (9)
. (9)
Поясним, что в (через df /dt обозначена полная (субстанциональная, т. е. связанная с фиксированными частицами газа) производная по времени какой-либо величины, характеризующей данную неизменную массу газа.
Раскрыв df /dt через частные производные по х, у, z и t в соответствии с правилом  , придем к уравнениям движения Эйлера
, придем к уравнениям движения Эйлера
![]() . (10)
. (10)
Будучи записаны покоординатно, они принимают вид
![]() (11)
(11)
![]() (12)
(12)
![]() (13)
(13)
В отличие от течения грунтовых вод, градиенты давления в уравнениях движения газа (6)-(13) определяют компоненты ускорения вещества, а не компоненты его скорости.
Для пояснения этих особенностей предварительно упростим уравнения
 (1)
(1)
используя два обстоятельства. Первое из них отсутствие в среде (по предположению) изменений энергии за счет теплопроводности, вязкости, излучения, внешних источников и стоков энергии и т. д. С термодинамической точки зрения это означает, что процесс адиабатический и энтропия S каждой фиксированной жидкой частицы со временем не меняется. Тогда уравнение энергии (1) можно переписать в эквивалентной форме
![]() . (2)
. (2)
В этом нетрудно убедиться, также чисто формально применяя второе начало термодинамики
(27)
к жидкой частице.
Второе обстоятельство особенная простота выражения энтропии через давление и плотность в случае идеального газа:
где ![]() — показатель адиабаты, равный отношению удельной теплоемкости при постоянном давлении
— показатель адиабаты, равный отношению удельной теплоемкости при постоянном давлении ![]() и постоянном объеме
и постоянном объеме![]() ,
, ![]() несущественная константа. Из (26) с учетом (28) имеем
несущественная константа. Из (26) с учетом (28) имеем
![]()
что эквивалентно выражению
, (29)
означающему независимость от времени энтропии любой частицы газа. Функция ![]() описывает распределение энтропии по массе газа, определяемое по заданным в момент t = 0 функциям
описывает распределение энтропии по массе газа, определяемое по заданным в момент t = 0 функциям  .
.
Используя интеграл (29) вместо дифференциального уравнения (20), сведем (18), (19) к дифференциальному уравнению второго порядка относительно плотности:
![]() , (30)
, (30)
где ![]() , а постоянная
, а постоянная ![]() — энтропия, предполагаемая не зависящей также и от массовой координаты.
— энтропия, предполагаемая не зависящей также и от массовой координаты.
Гиперболичность уравнения (30) и тем самым уравнений газовой динамики легко установить не прибегая к вычислению характеристик, а получив его линейный аналог. Для этого рассмотрим малые возмущения газодинамических величин в окрестности постоянного решения ![]() .
.
Представляя возмущенное решение в виде  и предполагая малыми как сами возмущения, так и их производные, из (30) получаем уравнение для
и предполагая малыми как сами возмущения, так и их производные, из (30) получаем уравнение для ![]() (черточку опускаем):
(черточку опускаем):
![]() (31)
(31)
Линейное уравнение (31) полностью аналогично уравнению колебаний струны, имеющему, как известно, гиперболический тип. Оно описывает распространение малых (звуковых) возмущений в газе (уравнение акустики) со скоростью звука ![]() и, в силу линейности, для него нетрудно найти общее решение.
и, в силу линейности, для него нетрудно найти общее решение.
Еще одно упрощение уравнений (18), (19), (29) получается в предположении о том, что течение имеет характер простой волны, т. е. любые газодинамические величины являются функциями какой-то одной выбранной величины, например плотности. Из (18), (19), (29) и с учетом того, что  , получаем
, получаем
![]()
где ![]() — производная скорости по плотности. Исключая из последних уравнений величину
— производная скорости по плотности. Исключая из последних уравнений величину ![]() , приходим к уравнению Хопфа
, приходим к уравнению Хопфа
![]() . (32)
. (32)
Уравнение (32) первого порядка, но оно содержит типичную газодинамическую нелинейность, и поэтому служит хорошей моделью для изучения нелинейных эффектов, характерных для течений сжимаемого газа. Самый яркий из них — «градиентная катастрофа», заключающаяся в появлении в волнах сжатия бесконечных градиентов
газодинамических величин, несмотря на то, что в начальный момент времени все функции являются гладкими.
Модуль №3. «Математические модели в экономике»
Лекция №12. Математические методы исследования динамических экономических систем.
В этом модуле макроэкономические процессы изучаются как переходные процессы в динамических системах, поэтому экономика рассматривается как динамическая система.
Дается ориентированное па экономику описание математических методов исследования динамических систем, а также рассматриваются математические модели переходных процессов в макроэкономической системе.
Экономика как нелинейная динамическая система. Модель Солоу
Система — это совокупность составляющих ее элементов и взаимосвязей между ними. Социально-экономические системы — цеяе-реализующие системы.
Подсистема — часть системы, реализующая цели, согласованные с целями системы или являющиеся частью целей системы. Если автономные цели подсистемы противоречат целям системы, то через определенное время произойдет распад системы.
Надсистема — окружающая систему среда, в которой функционирует система.
Любая система обладает свойством эмерджентности, т. е. такими свойствами, которые не присущи отдельным составляющим ее элементам.
Экономическая система, понимаемая как национальная, — это совокупность национальных хозяйственных единиц (предприятий, организаций), объединенных производственно-технологическими и организационно-хозяйственными связями.
В свою очередь хозяйственная единица может иметь сложную структуру.
Экономическая система состоит из двух главных подсистем: производственной и финансово-кредитной.
Здесь приведено одно из многих определений системы, наиболее соответствующее дальнейшему изложению.
Надсистемой экономики как системы служат экономика других стран, природа и общество.
Любая целереализующая (самоорганизующаяся) система или любая ее подсистема, любой ее элемент, в свою очередь, могут рассматриваться как контур обратной связи, состоящий из управляемого объекта О и органа управления (регулятора) R, как это показано на рис. 1.1, на котором введены следующие обозначения:
х — вход в управляемый объект (например, ресурсы);
у — выход из управляемого объекта (например, продукция);
![]() — управляющий сигнал (выход органа управления).
— управляющий сигнал (выход органа управления).
Пунктиром обозначен агрегированный элемент.
Рис. 1.1. Структурная схема управляемого объекта
Элементы, из которых состоит система, могут быть статическими
или динамическими.
Статический элемент системы
Статический элемент без задержки (мгновенно) преобразует вход х в выход у = f{x).
Иными словами, этот элемент рассматривается как «черный ящик», внутреннее устройство которого в данном исследовании не принимается во внимание, а предметом изучения является то, как вход преобразуется в выход. Причина х мгновенно преобразуется в следствие у. Время  подразумевается по умолчанию. Оно одинаково для входа и выхода.
подразумевается по умолчанию. Оно одинаково для входа и выхода.
Например, в теории однопродуктовой фирмы выпуск у задается как функция затраченных на выпуск ресурсов:
гле F(x) — вообще говоря, нелинейная производственная функция многих переменных ![]() .
.
Таким образом, фирма рассматривается как нелинейный статический элемент.
Другим примером является описание экономики страны в виде макроэкономической производственной функции
Y= F(K, L),
где Y— валовой внутренний продукт;
К— основные производственные фонды;
L — число занятых.
Динамический элемент системы
Динамический элемент характеризуется тем, что его выход в любой момент времени t зависит не только от входа в настоящий момент ![]() но и от значений входа и, быть может, выхода в прошлые моменты времени t — 1, t — 2, ...
но и от значений входа и, быть может, выхода в прошлые моменты времени t — 1, t — 2, ...
Например, в статической форме линейная связь между национальным доходом N и потреблением С в любой год может быть представлена в форме (индекс времени ![]() опушен, но подразумевается по умолчанию):
опушен, но подразумевается по умолчанию):
С= aN (статический элемент), где а — доля фонда потребления в национальном доходе.
В динамике эта связь может быть представлена в виде:  (динамический элемент),
(динамический элемент),
т. е. потребление в текущий год t зависит от величины национального дохода не только в настоящий год t, но и в предшествующие годы  .
.
Таким образом, в динамическом элементе причина переходит в следствие не мгновенно, а с некоторым запозданием.
Лекция №13. Симплекс метод в экономических моделях.
Двумерные задачи линейного программирования решаются графически. Для случая N=3 можно рассмотреть трехмерное пространство и целевая функция будет достигать своё оптимальное значение в одной из вершин многогранника.
В общем виде, когда в задаче участвуют N-неизвестных, можно сказать, что область допустимых решений, задаваемая системой ограничивающих условий, представляется выпуклым многогранником в n-мерном пространстве и оптимальное значение целевой функции достигается в одной или нескольких вершинах. Решить данные задачи графически, когда количество переменных более 3 весьма затруднительно. Существует универсальный способ решения задач линейного программирования, называемый симплекс-методом.
Симплекс-метод является основным в линейном программировании. Решение задачи начинается с рассмотрений одной из вершин многогранника условий. Если исследуемая вершина не соответствует максимуму (минимуму), то переходят к соседней, увеличивая значение функции цели при решении задачи на максимум и уменьшая при решении задачи на минимум. Таким образом, переход от одной вершины к другой улучшает значение функции цели. Так как число вершин многогранника ограничено, то за конечное число шагов гарантируется нахождение оптимального значения или установление того факта, что задача неразрешима.
Этот метод является универсальным, применимым к любой задаче линейного программирования в канонической форме. Система ограничений здесь - система линейных уравнений, в которой количество неизвестных больше количества уравнений. Если ранг системы равен r, то мы можем выбрать r неизвестных, которые выразим через остальные неизвестные. Для определенности предположим, что выбраны первые, идущие подряд, неизвестные X1, X2, ..., Xr. Тогда наша система уравнений может быть записана как
К такому виду можно привести любую совместную систему, например, методом Гаусса. Правда, не всегда можно выражать через остальные первые r неизвестных (мы это сделали для определенности записи). Однако такие r неизвестных обязательно найдутся. Эти неизвестные (переменные) называются базисными, остальные свободными.
Придавая определенные значения свободным переменным и вычисляя значения базисных (выраженных через свободные), мы будем получать различные решения нашей системы ограничений. Таким образом, можно получить любое ее решение. Нас будут интересовать особые решения, получаемые в случае, когда свободные переменные равны нулю. Такие решения называются базисными, их столько же, сколько различных базисных видов у данной системы ограничений. Базисное решение называется допустимым базисным решением или опорным решением, если в нем значения переменных неотрицательны. Если в качестве базисных взяты переменные X1, X2, ..., Xr, то решение {b1, b2,..., br, 0, ..., 0} будет опорным при условии, что b1, b2,..., br ≥ 0.
Симплекс-метод основан на теореме, которая называется фундаментальной теоремой симплекс-метода. Среди оптимальных планов задачи линейного программирования в канонической форме обязательно есть опорное решение ее системы ограничений. Если оптимальный план задачи единственен, то он совпадает с некоторым опорным решением. Различных опорных решений системы ограничений конечное число. Поэтому решение задачи в канонической форме можно было бы искать перебором опорных решений и выбором среди них того, для которого значение F самое большое. Но, во-первых, все опорные решения неизвестны и их нужно находить, a, во-вторых, в реальных задачах этих решений очень много и прямой перебор вряд ли возможен. Симплекс-метод представляет собой некоторую процедуру направленного перебора опорных решений. Исходя из некоторого, найденного заранее опорного решения по определенному алгоритму симплекс-метода мы подсчитываем новое опорное решение, на котором значение целевой функции F не меньше, чем на старом. После ряда шагов мы приходим к опорному решению, которое является оптимальным планом.
Итак, симплексный метод вносит определенный порядок как при нахождении первого (исходного) базисного решения, так и при переходе к другим базисным решениям. Его идея состоит в следующем.
Имея систему ограничений, приведенную к общему виду, то есть к системе m линейных уравнений с n переменными (m < n), находят любое базисное решение этой системы, заботясь только о том, чтобы найти его как можно проще.
Если первое же найденное базисное решение оказалось допустимым, то проверяют его на оптимальность. Если оно не оптимально, то, осуществляется переход к другому, обязательно допустимому базисному решению.
Симплексный метод гарантирует, что при этом новом решении линейная форма, если и не достигнет оптимума, то приблизится к нему. С новым допустимым базисным решением поступают так же, пока не находят решение, которое является оптимальным.
Если первое найденное базисное решение окажется недопустимым, то с помощью симплексного метода осуществляется переход к другим базисным решениям, которые приближают нас к области допустимых решений, пока на каком-то шаге решения либо базисное решение окажется допустимым и к нему применяют алгоритм симплексного метода, либо мы убеждаемся в противоречивости системы ограничений.
Таким образом, применение симплексного метода распадается на два этапа: нахождение допустимого базисного решения системы ограничений или установление факта ее несовместности; нахождение оптимального решения.
При этом каждый этап может включать несколько шагов, соответствующих тому или иному базисному решению. Но так как число базисных решений всегда ограниченно, то ограниченно и число шагов симплексного метода.
Приведенная схема симплексного метода явно выражает его алгоритмический характер (характер четкого предписания о выполнении последовательных операций), что позволяет успешно программировать и реализовать этот метод на ЭВМ. Задачи же с небольшим числом переменных и ограничений могут быть решены симплексным методом вручную.
Не останавливаясь подробнее на сути алгоритма, опишем его вычислительную сторону. Вычисления по симплекс-методу организуются в виде симплекс-таблиц, которые являются сокращенной записью задачи линейного программирования в канонической форме. Перед составлением симплекс-таблицы задача должна быть преобразована, система ограничений приведена к допустимому базисному виду, c помощью которого из целевой функции должны быть исключены базисные переменные. Вопрос об этих предварительных преобразованиях мы рассмотрим ниже. Сейчас же будем считать, что они уже выполнены и задача имеет вид:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
