

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
проектирования и анализа систем управления с обратной связью“
Красноярский государственный университет цветных металлов и золота
Кафедра автоматизации производственных процессов
 
|
Красноярск 2005 г. |
Лабораторная работа № 9
“Изучение пакета CtrlLAB системы MATLAB для
проектирования и анализа систем управления с обратной связью“
ЦЕЛЬ РАБОТЫ
1. Ознакомиться с составом и назначением программного пакета CtrlLAB.
2. Ознакомиться с основными методами и примерами использования программного пакета CtrlLAB для моделирования и анализа систем управления.
3. Освоить расчет, настройку и анализ систем с обратной связью в среде CtrlLAB системы MATLAB.
МЕТОДИКА ВЫПОЛНЕНИЯ РАБОТЫ
1. Открыть рабочее окно программы CtrlLAB.
2. Изучить теоретические сведения о пакете CtrlLAB.
3. Закончив изучение теоретических сведений о пакете CtrlLAB, выполнить задание по моделированию СУ.
1 Основные сведения о пакете CtrlLAB 3.0
CtrlLAB – это основанная на MATLAB программа, которая может быть использована при анализе и разработке SISO (система с одним входом и одним выходом) систем управления. В программе широко используются возможности графического интерфейса пользователя (GUI) MATLAB v5.0 и выше, чтобы сделать ее гибким, удобным для пользователя и мощным приложением как для обучения, так и для проектирования.
Впервые CtrlLAB был опубликован на анонимном сайте MathWorks как пользовательская программа для MATLAB и с тех пор привлек к себе много внимания. Сейчас CtrlLAB является гораздо более совершенным приложением и предоставляет гораздо больше полезных и надежных функций.
Основными возможностями CtrlLAB являются:
1. Ввод моделей, включая моделирование SIMULINK.
2. Показ моделей.
3. Реализация пространства состояний системы.
4. Упрощение систем с использованием различных методов.
5. Анализ систем в частотной, комплексной и временной области.
6. Вывод графиков с возможностью их редактирования и изменения.
7. Матричный процессор и редактор GUI.
8. Некоторые блоки проектирования контроллера, такие как классические (ПИД регулирование с временной задержкой, LQ optimal, положение полюсов, и т. д.), средства настройки и просмотра ПИД-регуляторов, методы разработки робастных контроллеров.
2 Основы работы с CtrlLAB 3.0
Чтобы запустить CtrlLAB, наберите в окне MATLAB ‘ctrllab’ . Появится графический интерфейс пользователя с меню, как показано на рисунке 1. Сначала пользователю необходимо задать модель объекта управления и другие модели, если таковые имеются, затем можно будет выполнять задачи анализа и конструирования.
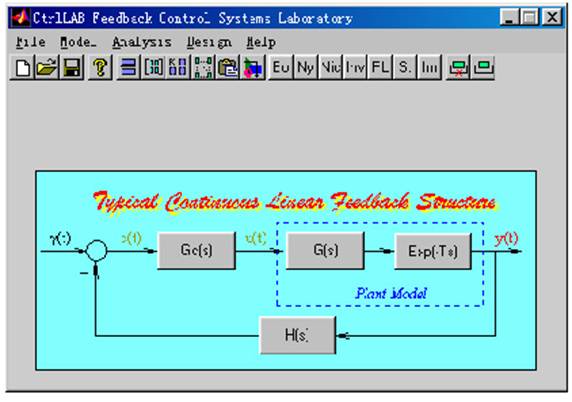
Рисунок 1 Графический интерфейс пользователя CtrlLAB
Ввод передаточных функций
Для ввода передаточной функции ОУ необходимо нажать левой кнопкой мыши по значку G(s) и в всплывающем окне (рисунок 2) ввести значения коэффициента усиления Коб и постоянной времени Тоб. Это же окно можно вызвать, выбрав в меню Model пункт Model select>G(s).
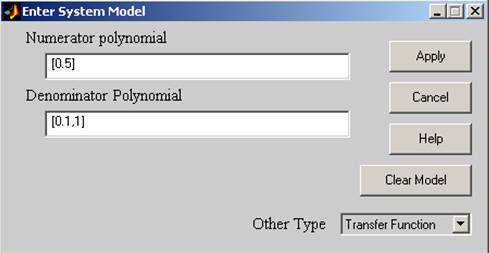
Рисунок 2 Окно ввода модели объекта
После нажатия кнопки “Apply” появится окно ввода данных, которое будет содержать введенную ПФ объекта управления (рисунок 3).
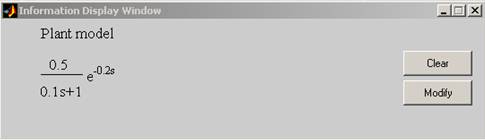
Рисунок 3 Вид окна ввода данных с введенной ПФ объекта управления
Чтобы изменить введенную передаточную функцию и вернутся к окну, показанному на рисунке 2, можно нажать кнопку Modify окна ввода данных.
Также в CtrlLAB предусмотрен ввод моделей объекта, заданных в пространстве состояний, в виде нулей-полюсов или диаграмм SIMULINK. Чтобы задать модель любым из перечисленных способов, выберите соответствующий пункт в строке Other types окна ввода модели объекта. По умолчанию модель задается в виде передаточной функции. Модель в виде нулей-полюсов или пространства состояний может быть получена автоматически по заданной передаточной функции. Для этого, после ввода передаточной функции выберите пункт Pole-zero-gain или State space. Передаточная функция будет преобразована, и результат будет выведен на экран, как показано на рисунках 4 и 5.
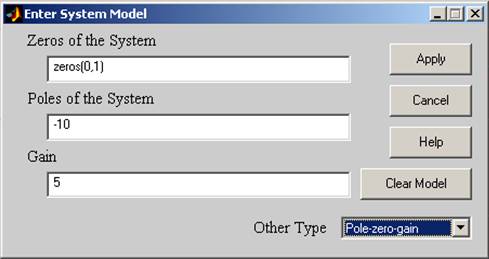
Рисунок 4 Модель объекта в виде нулей полюсов
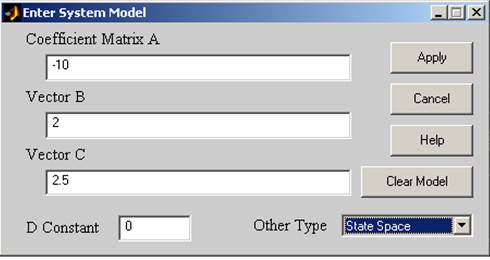
Рисунок 5 Модель объекта в виде пространства состояний
Если анализируемая система содержит более сложные структуры, такие как блочные диаграммы или системы с нелинейностью, то для моделирования системы используется SIMULINK. Можно выбрать пункт SIMULINK в строке other types диалогового окна, показанного на рисунке 2, в этом случае необходимо будет задать имя модели (внутреннее имя), после чего появится среда редактирования SIMULINK, как показано на рисунке 6 (а) и (b). На рисунке (а) показана библиотека блоков, из которой можно получить все блоки SIMULINK. На рисунке (b) показано пустое окно редактора моделей SIMULINK, в котором можно задать свою систему между входным и выходным портом системы. Когда процесс ввода системы закончен, надо дважды щелкнуть мышкой кнопку Return to CtrlLAB, чтобы вернуться СtrlLAB.
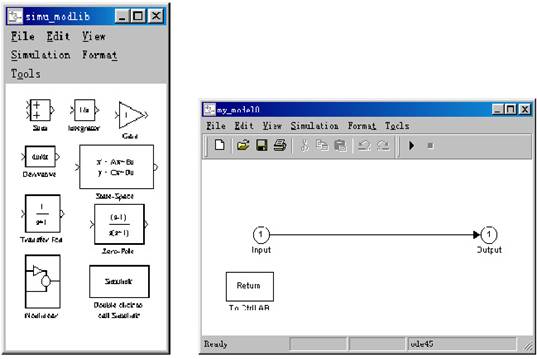
(а) Библиотека блоков (b) окно редактора модели
Рисунок 6 Средства ввода моделей SIMULINK
В СtrlLAB вместе с моделью SIMULINK будет создана и сохранена линеаризованная передаточная функция системы.
После того, как модель объекта управления задана, нажатием левой кнопкой мыши по значку Exp(-Ts) введем значение запаздывания. Надпись в окне ввода данных изменится (рисунок 7).
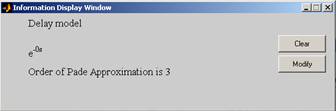
Рисунок 7 Окно ввода данных до введения запаздывания
Нажимаем кнопку “Modify” и в появившемся окне вводим значение запаздывания. Также в этом окне можно ввести значение аппроксимации Pade (рисунок 8).
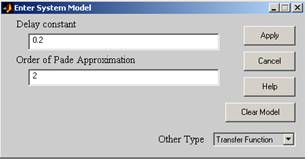
Рисунок 8 Окно ввода запаздывания модели
После нажатия кнопки “Apply” появится окно ввода данных, которое будет содержать значение введенного запаздывания и аппроксимации Pade (рисунок 9).
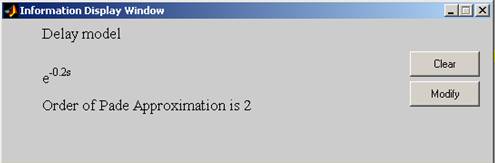
Рисунок 9 Окно ввода данных с введенным запаздыванием и значением
аппроксимации Pade
Окно ввода данных можно закрыть.
После выполнения этого действия модель объекта управления введена.
Расчет ПИД-регулятора
Если в рабочее поле MATLAB задана модель объекта управления, то для этой системы можно рассчитать ПИД-регулятор.
В пакете CtrlLAB есть возможность расчета параметров ПИД-регулятора с помощью различных критериев:
· Ziegler-Nichols;
· Cohen-Coon;
· усовершенствованный метод Ziegler-Nichols;
· Chien (CHR) Tuning;
· модифицированный метод Ziegler-Nichols;
· внутреннее управление моделью.
Наиболее часто применяемый критерии расчета параметров ПИД-регулятора – это критерий Ziegler-Nichols.
Расчет ПИД-регуляторов осуществляется с помощью меню Design>PID controller, вид которого показан на рисунке 10.
Рисунок 10 Меню расчета параметров контроллера
Кроме стандартного ПИД-регулятора можно также рассчитать П, ПИ-регулятор и ПИД-регулятор с Д-составляющей в контуре обратной связи. Тип регулятора можно выбрать в меню Design>PID controller>Controller type, показанного на рисунке 11.
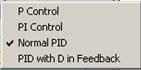
Рисунок 11 Меню выбора типа контроллера
Для расчета параметров ПИД-регулятора по методу Ziegler-Nichols выберем в меню Design>PID controller>Controller type пункт Normal PID, затем в меню Design>PID controller>One-shot design выберем пункт Ziegler-Nichols tuning.
После расчета настроек регулятора появится окно ввода данных с ПФ регулятора в прямой связи (рисунок 12).
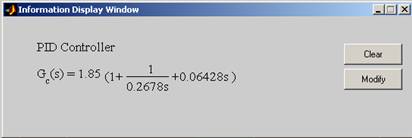
Рисунок 12 Передаточная функция ПИД-регулятора по методу Ziegler-Nichols
Построим переходные характеристики системы. Для этого выберем пункт меню Analysis>Time domain analysis>Step response, либо нажмем кнопку ![]() основного интерфейса. На экране появится переходная характеристика замкнутой системы вместе с характеристикой некомпенсированной системы, как показано на рисунке 13.
основного интерфейса. На экране появится переходная характеристика замкнутой системы вместе с характеристикой некомпенсированной системы, как показано на рисунке 13.
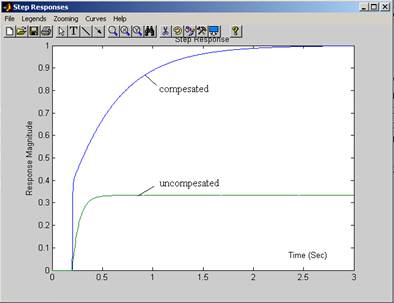
Рисунок 13 Переходные процессы в системе с (compensated) и без (uncompensated) регулятора
Рассчитаем также контроллер по методу Cohen-Coon. Для этого в меню, показанном на рисунке 10, выберем пункт One-shot design> Cohen-Coon.
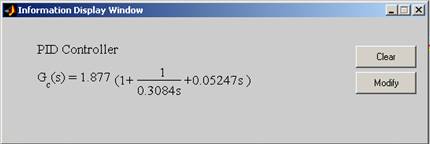
Рисунок 14 Передаточная функция ПИД-регулятора по методу Cohen-Coon
Построим переходные характеристики системы.
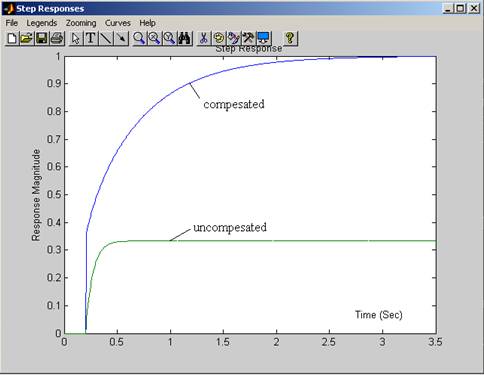
Рисунок 15 Переходные процессы в системе с (compensated) и без (uncompensated) регулятора
В пакете CtrlLAB предоставлена возможность оптимизации рассчитанных настроек регулятора с помощью критериев ISE (минимум интеграла квадратичной ошибки), ISTE, IST2E и критерия оптимизации по фазе. Для выбора критерия выбираем необходимый в меню Design>PID-controller> Optimum tuning.
После проведения оптимизации настроек регулятора по ISE критерию получаем следующие настройки ПИД-регулятора (см. рисунок 16).
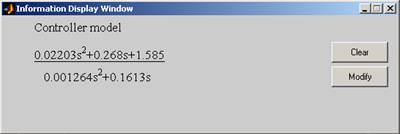
Рисунок 16 Оптимизированные настройки ПИД-регулятор (Ziegler-Nichols)
После проведения оптимизации настроек ПИД-регулятора (см. рисунок 17) время регулирования уменьшились, качество регулирования улучшилось.
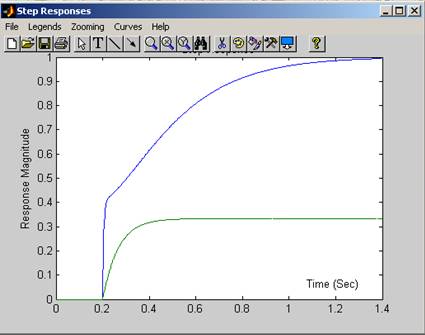
Рисунок 17 Вид ПП после оптимизации настроек ПИД-регулятора (Ziegler-Nichols)
3 Анализ систем
С помощью CtrlLAB можно выполнять различные виды анализа систем. Если известна модель объекта управления системы, то можно выбрать в меню главного интерфейса пункт Analysis и вызвать меню анализа системы, показанное на рисунке 18. Оно позволяет выполнять различные задачи анализа систем непосредственно с помощью меню CtrlLAB.
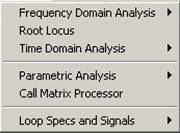
Рисунок 18 Меню анализа системы
Частотный анализ
Построим диаграмму Боде системы. Для этого выберем в меню пункт Analysis>Frequency Domain Analysis>Bode diagram. Диаграмма Боде появится, как показано на рисунке 19 (а). Если пользователь выберет подменю Curves>Add asymptotic в окне диаграммы Боде, то вместе с точной на экран будет выведена асимптотическая диаграмма Боде, как показано на рисунке 19(b).
|
|
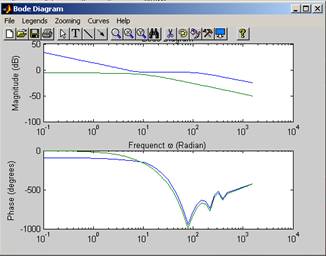
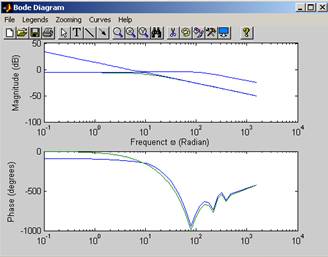
(а) диаграмма Боде (b) точная и асимптотическая диаграммы Боде
Рисунок 19 Диаграмма Боде разомкнутой системы
Свойства графиков можно изменить. Для этого в окне диаграммы Боде выберем в меню File пункт preferences, появится диалоговое окно, показанное на рисунке 20, в котором можно будет изменить некоторые детали графика такие как рамка, координатная сетка, цвета и т. д. (подробнее о работе с графиками будет рассказано далее).
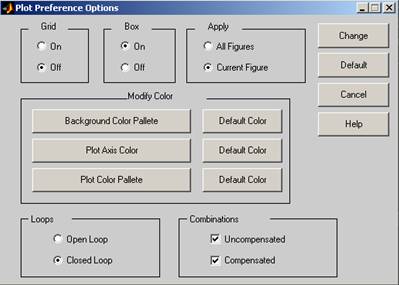
Рисунок 20 Окно свойств графика
Кроме того, с помощью этого окна можно строить графики как замкнутого, так и разомкнутого контура системы. Обратите внимание, что окно Combination с двумя флажками, которое позволяет пользователю анализировать как Compensated так и Uncompensated модели доступно только если задан блок контроллера.
Теперь построим диаграммы Найквиста и Никольса, выбрав в меню Analysis пункты Frequency Domain Analysis>Nyquist plot и Frequency Domain Analysis>Nichols chart. Результат показан на рисунках 21 и 22 соответственно.
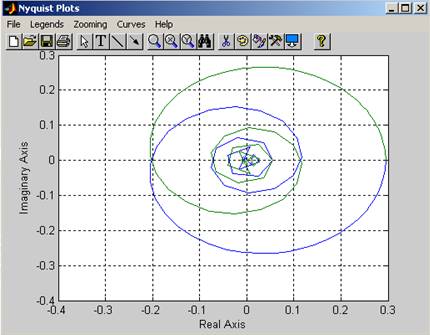
Рисунок 21 Годограф Найквиста разомкнутой системы
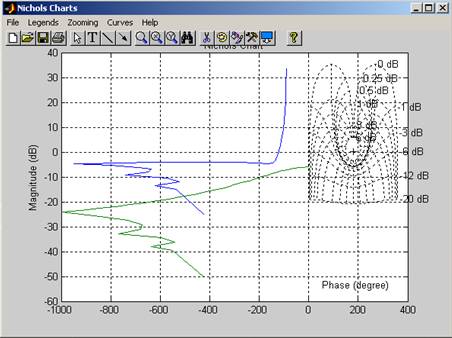
Рисунок 22 Диаграмма Никольса разомкнутой системы
Чтобы получить график расположения корней, выберем в меню Analysis пункт Root locus (см. рисунок 23).
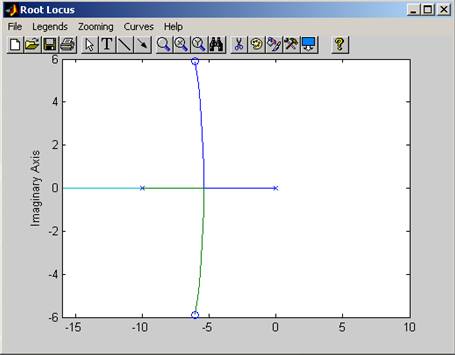
Рисунок 23 График расположения корней
Анализ систем во временной области
График переходной и импульсной переходной характеристик можно получить, выбрав в меню соответственно Analysis>Time Domain Analysis>Step response и Analysis> Time Domain Analysis>Impulse response.
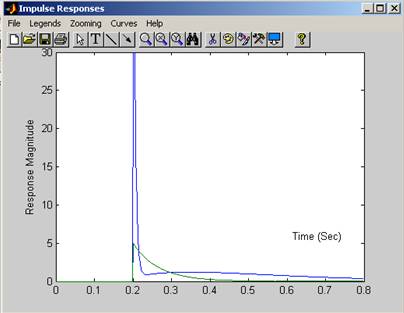
Рисунок 24 Импульсная переходная характеристика замкнутой системы
По умолчанию строится переходная характеристика замкнутого контура. Но можно построить переходную характеристику и разомкнутого контура, изменив соответствующий пункт диалогового окна (см. рисунок 20).
Также можно установить диапазон графика, выбрав в меню окна графика пункт Zooming>User Define. Появится диалоговое окно, показанное на рисунке 25 в котором можно задать новый диапазон.
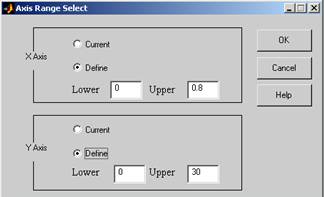
Рисунок 25 Окно изменение диапазона графика
Кроме выходного, можно получить временные отклики и других сигналов системы. Построим на одном графике отклики сигнала ошибки (е(t), сигнала управления (u(t) и выходного сигнала на единичное ступенчатое воздействие. Для этого сначала выберем в меню Analysis>Loop Specs and Signals пункт Error signal e(t), затем выберем пункт Close loop этого же мню. Построим переходной процесс как было описано ранее. В окне графика в меню File выберем пункт Axis and Grids>Hold figure. После этого аналогичным образом построим характеристики управляющего воздействия Actuating signal u(t) и выходного сигнала Output signal y(t). Результат построений приведен на рисунке 26.
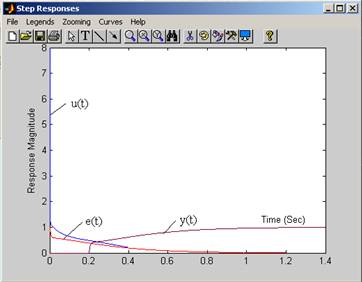
Рисунок 26 Отклики сигнала ошибки, управляющего воздействия и выходного сигнала
Анализ свойств системы
Получим запасы устойчивости по амплитуде и фазе анализируемой системы. Для этого в меню Analysis выберем пункт Parametric Analysis > Gain/Phase Margins. Появится информационное окно, показывающее предельные значения фазы и коэффициента усиления системы (см рисунок 27).
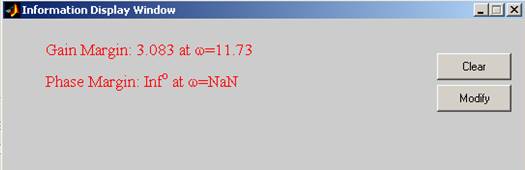
Рисунок 27 Запас устойчивости по амплитуде и фазе
Кроме запасов устойчивости в CtrlLAB можно также получить аналитическое выражение переходной характеристики. Для этого в меню Analysis выберем пункт Parametric Analysis>Analytical Solution. Появится информационное окно, содержащее выражение переходной характеристики системы.
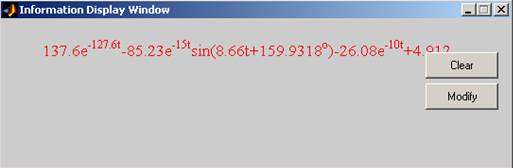
Рисунок 28 Аналитическое выражение переходной характеристики
Для удобства работы, некоторые из вышеперечисленных функций вынесены в виде отдельных клавиш в основной интерфейс программы. К числу этих функции относятся:
 |
![]()
4 Упрощение моделей
Порядок модели можно понизить. Для этого нужно в меню выбрать пункт Model>Reduction. На экране появится диалоговое окно упрощения модели (Рисунок 29), где представлены различные методы упрощения моделей, такие как аппроксимация Паде, метод Роуфа, метод основной волны, метод уравновешенной реализации, метод оптимального сокращения, FF-Pade метод, модальный метод, а также метод оптимальной аппроксимации Ханкеля.
Если в качестве метода упрощения выбрать метод оптимального сокращения и задать желаемый порядок упрощенной модели (Рисунок 29), то получим результат, показанный на рисунке 30.
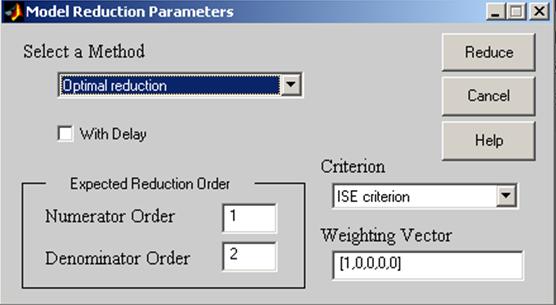
Рисунок 29 Диалоговое окно упрощения модели
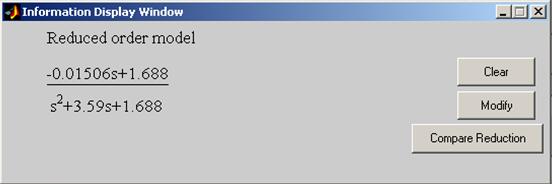
Рисунок 30 Упрощенная модель
Чтобы сравнить упрощенную и оригинальную модели, нажмите кнопку Compare responses в окне показа модели; появится новое диалоговое окно (см рисунок 31).
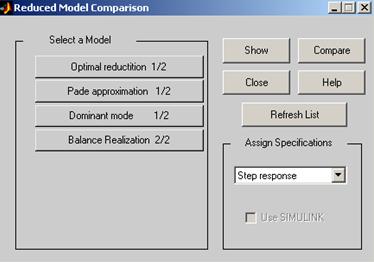
Рисунок 31 Окно сравнения моделей
Выберите модель и характеристики для сравнения. Можно сравнивать модели, упрощенные разными методами, а также различные отклики, такие как диаграмма Боде, годограф Найквиста, диаграмма Никольса, а также переходные и импульсные переходные характеристики оригинальной и упрощенной моделей. Затем нажмите кнопку Compare. Для примера, на рисунке 30 показаны в сравнений переходные характеристики оригинальной и упрощенной с помощью метода оптимального сокращения моделей. Оригинальная модель была заданна в виде G(s) = (1.5s2 + 8.7s + 6)/(s4 + 9s3 + 23s2 + +22.5s+ 6). Графики оригинальной модели изображаются сплошной синей линией, а упрощенной – зеленой. Как видно из графика, отклики моделей практически совпадают.
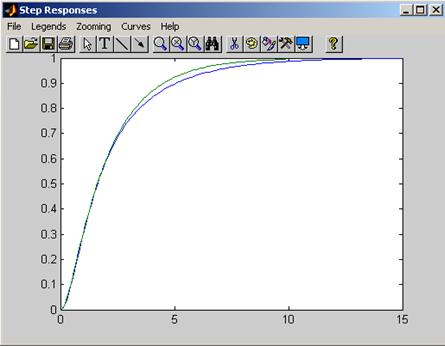
Рисунок 32 Сравнение упрощенной и оригинальной моделей
5 Работа с графиками
С построенными в CtrlLAB графиками можно проводить следующие действия:
· включать/выключать сетку на графике;
· наносить на поле графика необходимые надписи, выносные линии и перемещать их;
· изменять цвет осей, в которых построен график, области графика;
· изменять масштаб построенного графика;
· устанавливать в необходимом месте позицию курсора с указанием числовых значений;
· выбирать самостоятельно значения по осям координат;
· изменять тип, толщину и маркер кривой;
· выводить несколько графиков в одних координатах.
Чтобы включить сетку, необходимо на графике в меню File выбрать пункт Axis and Grids>with grid.
Для удобства чтения графиков в CtrlLAB можно добавлять легенду, различные надписи, линии выноски и указатели. Чтобы нанести надпись на график надо в меню Legends выбрать пункт New legend, либо нажать кнопку ![]() на панели окна графика. После этого указатель мыши превратиться в перекрестие. Установите перекрестие на то место, где должна быть надпись и нажмите левую кнопку мыши. Появится окно, в которое необходимо ввести текст надписи (см рисунок 33).
на панели окна графика. После этого указатель мыши превратиться в перекрестие. Установите перекрестие на то место, где должна быть надпись и нажмите левую кнопку мыши. Появится окно, в которое необходимо ввести текст надписи (см рисунок 33).
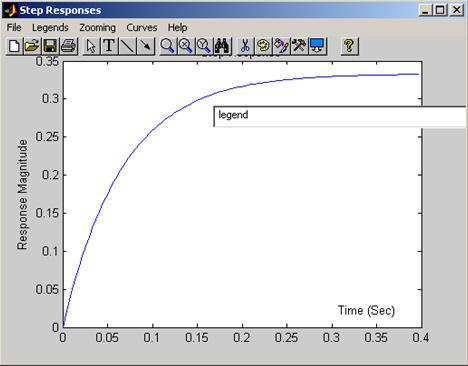
Рисунок 33 Добавление легенды
После того, как легенда добавлена, ее можно изменить, переместить или удалить с помощью пунктов меню Legends>edit, Legends>move и Legends>delete соответственно.
Чтобы добавить к графику линии выноски и указатели, необходимо выбрать в меню Legends пункты Add a line и Add an arrow, либо нажать кнопки ![]() и
и ![]() соответственно. В этом случае указатель мыши превратиться в перекрестие. Установите перекрестие в точку, где должна начинаться линия и нажмите левую кнопку мыши. Затем переведите курсор в место, где линия должна закончиться и снова нажмите кнопку мыши. Удалить ранее нанесенные линии можно с помощью пункта delete меню Legends.
соответственно. В этом случае указатель мыши превратиться в перекрестие. Установите перекрестие в точку, где должна начинаться линия и нажмите левую кнопку мыши. Затем переведите курсор в место, где линия должна закончиться и снова нажмите кнопку мыши. Удалить ранее нанесенные линии можно с помощью пункта delete меню Legends.
С помощью меню Curves можно изменять цвет, толщину, вид и маркер кривой. Для этого можно выбрать соответствующие пункты меню: Change curve color, Line Thickness, Change Curve Line Style, Change Curve Marker, либо выбрать пункт Line properties. При выборе любого из этих пунктов курсор мыши превратится в перекрестие. Наведите перекресте на кривую, которую хотите изменить и нажмите левую кнопку мыши. Если был выбран пункт Line properties, то появится меню, в котором можно задать тип, маркер и толщину линии (см. рисунок 34).
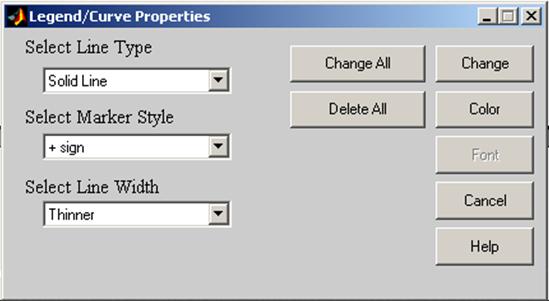
Рисунок 34 Меню свойств линии
Иногда построенный график может оказаться непредставительным из-за неудачного масштаба. Чтобы изменить диапазон графика по осям необходимо в меню Zooming выбрать пункт User define. Появится меню, в котором можно задать начальные и конечные значения осей графика (см рисунок 35).
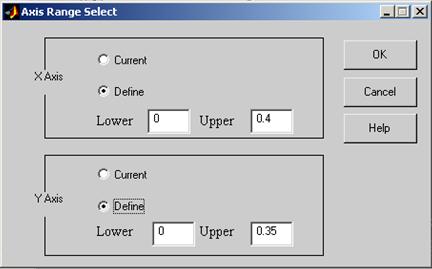
Рисунок 35 Изменение диапазона графика
В CtrlLAB можно выводить несколько графиков в одних координатах. Для этого необходимо в окне уже существующего графика выбрать в меню File пункт Axis and Grids>Hold Figure. После этого все последующие графики этого же типа будут построены в тех же координатах.
Если необходимо знать координаты каких-то определенных точек графика, то их можно выделить, выбрав в меню Legends пункт Cursor Positioning (см. Рисунок 36).
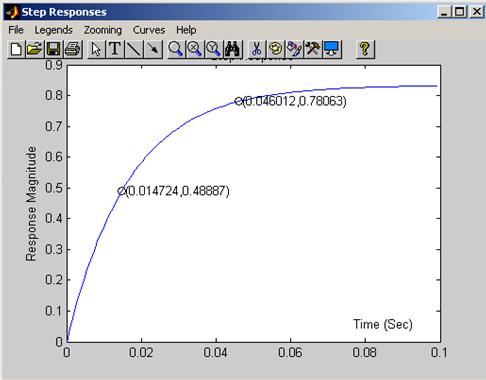
Рисунок 36 Подписи точек на графике
]6 Проектирование робастного контроллера
В это разделе рассмотрена только задача расчета H¥ контроллера, хотя другие задачи тоже могут решаться с помощью CtrlLAB. В качестве примера используем модель с двойным интегратором. Меню проектирования робастных контроллеров может быть вызвано с помощью пункта меню Design>Robust control. Его содержание показано на рисунке 37(а).
|
|


(а) меню робастного управления (b) диалоговое окно Н-нормы
Рисунок 37 Интерфейс проектирования робастного управления
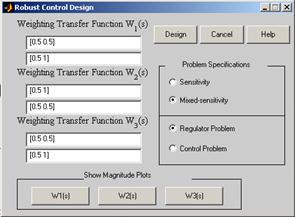
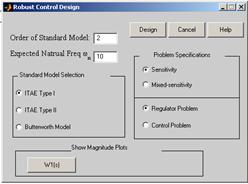
Чтобы получить оптимальный H¥ контроллер, выберите в меню пункт Design>Robust control>H_inf optimal. Появится диалоговое окно, показанное на рисунке 37(b), в котором пользователь может задать различные весовые функции W1(s), W2(s), W3(s). Если требуется выполнить расчет задачи чувствительности, то необходимо поставить галочку в окне Sensitivity. Диалоговое окно в этом случае примет вид, показанный на рисунке 38 (а). В нем можно задать ожидаемый порядок и собственную частоту эталонной стандартной ITAE модели. Например, если задать n=2 и wn=10, оптимальный H¥ контроллер будет получен в виде, показанном на рисунке 38(b).
|
|
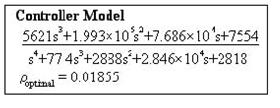
(а) диалоговое окно задачи чувствительности (b) оптимальный H¥ контроллер
Рисунок 38 Результаты расчета робастного контроллера
Диаграмма Никольса и переходная характеристика замкнутой системы после расчета регулятора показаны на рисунке 39 (а) и (b) соответственно. С помощью меню и диалоговых окон можно также рассчитывать и анализировать другие типы робастных контроллеров, таких как Н2 и LQG/LTR контроллеры.
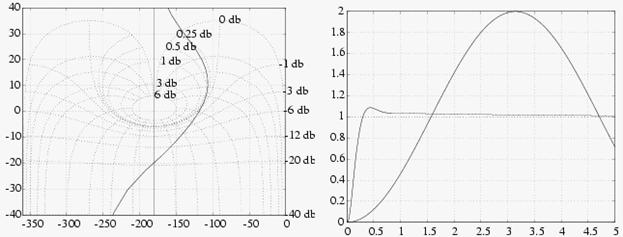
(а) Диаграмма Никольса (b) переходная характеристика замкнутой
системы
Рисунок 39 Анализ системы с робастным контроллером
Практическое задание
1. Запустите пакет CtrlLAB, для этого в рабочем поле MATLAB наберите команду ctrllab. Появится основной интерфейс программы, показанный на рисунке 1.
2. По данным таблицы 1 в соответствии с номером варианта задайте передаточную функцию объекта управления с запаздыванием. Для этого щелкните левой кнопкой мыши по блоку G(s) и в появившемся окне задайте числитель и знаменатель ПФ. Для задания запаздывания щелкните мышкой по блоку Exp(-Ts), в появившемся окне нажмите кнопку Modify и затем введите значение запаздывания.
3. Для заданного объекта управления рассчитайте передаточную функцию ПИД-регулятора, выбрав в меню Design пункт PID controller>One-shot design>Ziegler-Nichols tuning. Затем построите переходной процесс в системе. Для этого в мню Analysis выберите пункт Time Domain Analysis>Step. В окне графика выберите в пеню File пункт Axis and Grids>Hold Figure. После этого рассчитайте ПИД-регулятор по методу Cohen-Coon и снова постройте переходной процесс. Сравните полученные результаты.
4. Оптимизируйте настройки ПИД-регулятора. Чтобы выполнить это в пункте PID-controller> Optimum tuning меню Design выберите соответствующий критерий (например ISE). Постройте переходной процесс. Сравните результаты. После этого выключите опцию Hold figure.
5. Постройте переходной процесс в системе по возмущению. Для этого щелкните мышкой по блоку Gs(s) и в появившемся окне нажмите кнопку Modify. Выделите значение, стоящее в знаменателе и запишите его в буфер обмена нажатием клавиш Ctrl+C. Закройте это окно. Далее нажмите на H(s) и впишите в знаменатель ПФ регулятора в ОС значение из буфера, после этого нажимаем Apply. Далее проделайте те же самые операции с числителями этих блоков. В результате ПФ регулятора в ОС имеет такое же значение, как и ПФ регулятора в ПС. Нажмите на блок Gc(s) и впишите в числителе и знаменателе ПФ регулятора в ПС единицы. Для построения ПП нажмите на кнопку ![]() (единичное ступенчатое воздействие). После этого на экране появляется график переходного процесса по возмущению.
(единичное ступенчатое воздействие). После этого на экране появляется график переходного процесса по возмущению.
На титульном листе отчета укажите свою фамилию, группу и номер варианта.
Таблица 1.
№ варианта | Параметры объекта регулирования | |||
Kоб | T1об, с | Т2об, с | tоб, с | |
1 | 0,9 | 2,4 | 0,8 | 0,1 |
2 | 1,1 | 23 | 7 | 2 |
3 | 52 | 55 | 17 | 8 |
4 | 35 | 21 | 7 | 3 |
5 | 6 | 62 | 18 | 9 |
6 | 2,7 | 23 | 10 | 5 |
7 | 0,75 | 14 | 5 | 1,2 |
8 | 0,8 | 3,5 | 1,1 | 0,1 |
9 | 2,4 | 17 | 6,3 | 0,5 |
10 | 0,12 | 19,5 | 4,7 | 2,2 |
11 | 1,6 | 31 | 9,6 | 1 |
12 | 0,32 | 17 | 4,3 | 1,5 |
13 | 1,8 | 37 | 10 | 1,6 |
14 | 54 | 64 | 22 | 2,5 |
15 | 61 | 21 | 7,4 | 4,2 |
16 | 2,3 | 8 | 2,7 | 0,5 |
17 | 0,6 | 3,1 | 1,2 | 0,2 |
18 | 1,2 | 22 | 6,8 | 1,2 |
19 | 51 | 58 | 15 | 4,4 |
20 | 33 | 23 | 8 | 1,5 |
21 | 6,5 | 64 | 17 | 6 |
22 | 3,0 | 25 | 11 | 2 |
23 | 0,7 | 15 | 6,1 | 1,3 |
24 | 0,9 | 3,7 | 1,3 | 0,2 |
25 | 2,2 | 17,6 | 7,3 | 1,8 |
26 | 6,1 | 6 | 1,4 | 0,2 |
27 | 2,5 | 8,4 | 2,6 | 0,5 |
28 | 0,6 | 5,1 | 1,2 | 0,16 |
29 | 1,4 | 25 | 6,8 | 0,8 |
30 | 54 | 55 | 13 | 2,4 |
Контрольные вопросы для защиты
1. Состав и назначение пакета CtrlLAB.
2. Запуск и ввод блоков в CtrlLAB.
3. Ввод нелинейных объектов в CtrlLAB.
4. Построение моделей СУ в CtrlLAB.
5. Расчет ПИД-регулятора в CtrlLAB.
6. Оптимизация настроек регулятора в CtrlLAB.
7. Упрощение моделей в CtrlLAB.
8. Построение характеристик системы в CtrlLAB.
9. Работа с графиками.
10. Расчет робастных контроллеров.
