

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Самарский государственный архитектурно – строительный университет
Лабораторный практикум по моделированию систем. Часть 2.
Специализированное учебно – методическое пособие по организации самостоятельной работы студентов по дисциплине «Моделирование систем»
САМАРА 2012г.
В пособии показаны действия по аналитическому конструированию регуляторов для технических объектов. Каждый шаг синтеза имеет подробный комментарий.
Оглавление
1. Постановка задачи моделирования. 3
2. Синтез ПИД - регулятора. 4
3. Анализ качества синтезированного ПИД - регулятора. 7
4. Аналитический синтез регулятора. 11
5. Анализ качества синтезированного регулятора. 14
6. Решение тестовых задач на моделирование. 18
Литература. 24
Моделирование поведения технических систем и в частности систем автоматического управления является сложной, комплексной и актуальной задачей разработки новых систем и целенаправленного улучшения работы действующих.
Расчетно - графическое проектирование предусматривает выполнение ряда лабораторных работ, выполняемых каждым студентом последовательно и самостоятельно по индивидуальной программе решения прикладной задачи – синтеза структуры регулятора для заданного объекта управления.
1. Постановка задачи моделирования
Динамика работы объекта управления представлена своей математической моделью вида:
![]()
Индивидуальное задание на моделирование включает использование математической модели объекта регулирования (ОР) и его параметров. Параметры ОР приведены в таблице 1 и распределены по вариантам в соответствии с информацией о группе обучения студента, порядковом номере фамилии студента в списке группы. В таблице также заданы требования к моделированию.
Таблица 1.
Группа 1 | Группа 2 | Группа 3 | Группа 4 | Группа 5 | |
a0 | а | а | a | a | а |
a1 | 0.5*а | 0.2*a | 0.1*а | 0.3*а | 0 |
b0 | 2 | 1 | 0.5 | 1 | 1 |
b1 | 1 | 2 | 0 | 2 | 1 |
b2 | 3 | 1 | 2 | 3 | 1 |
| 2 | 3 | 1 | 2 | 1 |
| 1 | 2 | 1 | 2 | 1 |
Tрег (сек) | 1.5 | 1 | 3 | 1.5 | 3 |
В таблице 1 в качестве параметра а студент должен взять порядковый номер своей фамилии в списке группы и пересчитать соответствующие коэффициенты. Столбец таблицы 1 с параметрами ОР является персональным вариантом работы студента.
В задание на проектирование входит выполнение следующих этапов:
- выбор (синтез) структуры регулятора РГ двумя способами (ПИД – регулятора, набором и соединением типовых элементов);
- поиск параметров выбранной модели РГ в соответствии с решением задачи оптимизации для обеспечения требуемого качества;
- анализ качества синтезированной системы регулирования (САР);
- оформление заключения о выполненной работе и отчета.
2. Синтез ПИД - регулятора
Пусть задан ОР своей передаточной функцией:
Wор (s) = 1 / (s + 2).
Выберем ПИД регулятор, тогда схема управления примет вид:
Рис. 1. САР с ПИД регулятором в контуре управления
В схеме известен вид передаточных функций звеньев:
Wp = kp; W i= ki /s; Wd = kd s; Wор (s) = 1 / (s + 2).
Нужно найти значения вектора параметров x = ( kp, ki, kd), при которых корни si характеристического уравнения замкнутой системы принадлежат области качества [1] W, определяемой заданными в задании на моделирование параметрами качества работы объекта в системе регулирования: степенью устойчивости  , колебательностью
, колебательностью  и временем регулирования Tрег <= 3 (cек). Решение будем строить по шагам [2]:
и временем регулирования Tрег <= 3 (cек). Решение будем строить по шагам [2]:
1. Найдем передаточную функцию разомкнутой системы:

2. Определим передаточную функцию замкнутой системы:
3. Запишем характеристическое уравнение замкнутой системы:

4. Зададим эталонное расположение корней характеристического уравнения и по ним составим эталонное характеристическое уравнение:
![]() ,
,
![]()
5. Cоставим целевую функцию F(x) на основе минимизации невязок коэффициентов двух полиномов характеристических уравнений эталонной САР и проектируемой:
 .
.
Отметим, что поскольку на параметры вектора х не наложены ограничения, то имеем дело с задачей безусловной оптимизации. Для достижения минимума положительной квадратичной функции F(x) достаточно, чтобы нулю равнялись все три слагаемые, а именно:
Если мы используем необходимое и достаточное условие минимальности F(x), то получаем следующую систему уравнений:
Поскольку оптимизируемая функция является положительной, квадратичной, она имеет один экстремум – минимум и, следовательно, нет необходимости проверять условие Вейерштрасса, то есть положительность квадратичной формы.
Равенство нулю коэффициента ![]() говорит о том, что заданный объект управления настолько прост, что не требует введения в схему дифференцирующего звена. Другими словами им можно управлять только при помощи ПИ регулятора.
говорит о том, что заданный объект управления настолько прост, что не требует введения в схему дифференцирующего звена. Другими словами им можно управлять только при помощи ПИ регулятора.
Далее необходимо выполнить анализ спроектированной САР [3] во временной области, частотной области, комплексной области и подтвердить выполнимость заданных требований к качеству работы ОР в системе автоматического регулирования.
3. Анализ качества синтезированного ПИД - регулятора
Начнем анализ качества спроектированной системы автоматического регулирования с анализа качества в комплексной области по расположению корней характеристического уравнения. Для этого подставим найденные значения параметров регулятора в характеристическое уравнение. Будем иметь:
![]()
Его корнями будут: ![]() .
.
Как нетрудно заметить, корни полностью совпали с назначенными эталонными, что подтверждает высокую точность моделирования по используемой методике. Проверяя качество по этим корням, используя известные формулы, получаем:
· степень устойчивости ![]() ,
,
· колебательность ![]() ,
,
· время регулирования Tрег = 1.5 (cек).
Перепроверим результат, построив график переходного процесса на выходе САР во временной области. Для этого подставим полученные значения x = ( kp =3, ki=6, kd=0) в передаточную функцию САР. Получим:
Обратимся к пакету программ “MSO” к функции gen5. exe. Программа построит два графика: график переходной функции и график весовой функции. Оба графика приведены на рис. 2.
Рис.2. Графики переходной и весовой функций САР
Анализ качества управления по графикам Рис.2 позволил установить: время регулирования Tрег = 1 сек., время срабатывания tср. = 1 сек., время запаздывания tзап. = 0.07 сек, перерегулирование по переходной характеристике равно 0. Выполнение заданного качества управления объектом подтверждено.
Далее проверим качество синтезированной САР по частотным характеристикам. Для этого необходимо перейти от математической модели в виде передаточной функции к модели – частотной передаточной функции. Что не трудно получить заменой s= jw в выражении передаточной функции САР. Получим:

Обратимся к пакету программ “MSO” к функции gen6. exe. Программа построит два графика: график логарифмической амплитудно-частотной характеристики и логарифмической фазо - частотной характеристики, графики названных функций показаны на рис. 3.
Рис. 3. ЛАЧХ и ФАЧХ синтезированной САР
Анализ графиков позволил установить такие важные показатели качества САР в частотной области как: частоту среза, запас устойчивости по фазе и запас устойчивости по амплитуде:

Проведенный анализ качества управления заданным объектом полностью подтвердил хорошие динамические свойства синтезированной САР.
4. Аналитический синтез регулятора
Далее решим поставленную задачу синтеза другим подходом, подбором регулятора. Предложим модель регулятора по сложности сравнимой со сложностью объекта, т. е. с передаточной функцией вида:
![]()
Присоединим регулятор к объекту последовательно, введем отрицательную обратную связь по выходу ОР. Получим функциональную схему вида:
Рис. 4. САР с проектируемым регулятором в контуре управления
В представленной схеме не показанны измерительное устройство, исполнительное устройство, усилительный элемент, так как предполагается, что эти элементы не будут влиять на ухудшение качества управления.
Найдем передаточную функцию разомкнутой и замкнутой цепи. Получим:


Выделим из передаточной функции САР характеристическое уравнение, получим:
![]()
Анализ уравнения показывает, что алгебраическое уравнение есть уравнение второй степени, которое имеет два корня.
Согласно требованиям, предъявляемым к качеству работы объекта в системе регулирования, зададим корни эталонной САР, ими могут быть выбраны следующие корни:
Его корнями будут:
![]() .
.
По этим корням восстановим характеристическое уравнение эталонной САР, получим:
![]()
Далее, чтобы проектируемая САР вела себя как эталонная необходимо равенство коэффициентов при одинаковых степенях s характеристических полиномов эталонной и проектируемой САР. Из приравнивания этих коэффициентов следует система уравнений:
Решение системы уравнений дает следующие значения:

Полученный вариант решения не приемлем из-за равенства 0 коэффициента передачи в прямой цепи. Поэтому синтез будет продолжаться в направлении усложнения модели регулятора.
Выберем в качестве модели регулятора модель вида:
Повторим предыдущие действия уже с этой моделью регулятора.


Выделим из передаточной функции характеристическое уравнение, получим:
![]()
Анализ уравнения показывает, что алгебраическое уравнение есть уравнение второй степени, которое имеет два корня.
Согласно требованиям, предъявляемым к качеству работы объекта в системе регулирования, зададим корни эталонной САР, ими могут быть выбраны следующие корни:
Его корнями будут: ![]() .
.
По этим корням восстановим характеристическое уравнение эталонной САР, получим:
![]()
Далее, чтобы проектируемая САР вела себя как эталонная необходимо равенство коэффициентов при одинаковых степенях s характеристических полиномов эталонной и проектируемой САР.
Составим целевую функцию, как среднеквадратичную ошибку аппроксимации двух полиномиальных функций обозначенных характеристических уравнений, получим:

Найдем частные производные Решение системы уравнений дает следующие значения:
Решение полученной системы уравнений дает следующий результат:

Подставим полученные результаты в математическую модель САР в виде передаточной функции и проведем анализ синтезированной системы.
5. Анализ качества синтезированного регулятора
Начнем анализ качества спроектированной системы автоматического регулирования с анализа качества в комплексной области по расположению корней характеристического уравнения. Для этого подставим найденные значения параметров регулятора в характеристическое уравнение. Будем иметь:
![]()
Его корнями будут: ![]() .
.
Как нетрудно заметить, корни полностью совпали с назначенными эталонными, что подтверждает высокую точность моделирования по используемой методике. Проверяя качество по этим корням, используя известные формулы, получаем:
· степень устойчивости ![]() ,
,
· колебательность ![]() ,
,
· время регулирования Tрег = 1.5 (cек).
Перепроверим результат, построив график переходного процесса на выходе САР во временной области. Для этого подставим полученные значения х1=2, х2=2 в передаточную функцию САР. Получим:

Обратимся к пакету программ “MSO” к функции gen5. exe. Программа построит два графика: график переходной функции и график весовой функции. Оба графика приведены на рис. 5.
Рис.5. Графики переходной и весовой функций САР
Анализ качества управления по графикам Рис.5 позволил установить: время регулирования Tрег = 1 сек., время срабатывания tср. = 1 сек., время запаздывания tзап. = 0.07 сек, перерегулирование по переходной характеристике равно 0. Выполнение заданного качества управления объектом подтверждено.
Однако следует отметить, что переходная функция показывает статическую ошибку 0.667, что свидетельствует о низкой точности регулирования, хотя в главных требованиях на качество точность не рассматривалась.
Далее проверим качество синтезированной САР по частотным характеристикам. Для этого необходимо перейти от математической модели в виде передаточной функции к модели – частотной передаточной функции. Что не трудно получить заменой s= jw в выражении передаточной функции САР. Получим:

Обратимся к пакету программ “MSO” к функции gen6. exe. Программа построит два графика: график логарифмической амплитудно-частотной характеристики и логарифмической фазо - частотной характеристики, графики названных функций показаны на рис. 6.
Рис. 6. ЛАЧХ и ФАЧХ синтезированной САР.
Анализ графиков позволил установить такие важные показатели качества САР в частотной области как: частоту среза, запас устойчивости по фазе и запас устойчивости по амплитуде:

Проведенный анализ качества управления заданным объектом полностью подтвердил хорошие динамические свойства синтезированной САР.
6. Решение тестовых задач на моделирование
Задача 1.
Задачей исследования ставится – сконструировать регулятор для заданного объекта, чтобы его работа в системе автоматического регулирования подчинялась заданным требованиям, предъявляемым к качеству. При этом на качество управления заданы ограничения вида:
- степень устойчивости ![]() >= 2;
>= 2;
- колебательность процессов µ < 1;
- время регулирования Tрег <= 1.5 (сек).
Объект для исследования задан своей моделью – передаточной функцией второго порядка, а именно:
 |
.
В качестве регулятора выберем техническое устройство эквивалентной сложности, которое своей математической моделью в общем виде представится формулой:
 |
что дает 4 степени свободы (х1, х2, х3, х4 ) для проектирования САР с требуемым качеством управления объектом.
Представим функциональную схему САР в виде схемы, показанной на рис.4.
Решение будет строиться на основе известной методики [1-3]. Что предполагает моделирование процессов в комплексной области s и задание эталонной САР через расположение полюсов (корней характеристического уравнения).
В начале решения найдем передаточную функцию САР по моделям передаточных функций регулятора и объекта регулирования, получим:
 .
.
Выделим из передаточной функции знаменатель и приравняем его к нулю, получим характеристическое уравнение САР:

Корни характеристического уравнения являются показателями устойчивости САР и по ним определяются степень устойчивости, колебательность процессов, время регулирования. Этим их свойством и воспользуемся для задания эталонной САР, а именно через расположение полюсов (корней характеристического уравнения). Учитывая требования на качество управления и основные формулы, связывающие корни характеристического уравнения с показателями: ![]() , µ, Tрег возьмем в качестве эталонных полюсов полюса вида:
, µ, Tрег возьмем в качестве эталонных полюсов полюса вида:
![]()
По ним восстановим коэффициенты характеристического уравнения эталонной САР, получим:
Таким образом, вычисления нас подвели к тому, что мы имеем два характеристических уравнения: эталонной и проектируемой САР с характерными полиномиальными функциями, которые могут быть использованы для формирования целевой функции. В качестве целевой функции, сближающей характеристические полиномы, рационально использовать среднеквадратическую ошибку аппроксимации, составленную из квадратов невязок по коэффициентам полиномов при соответствующих степенях:

Анализ целевой функции показывает, что она положительная квадратичная, ее минимальное значение есть 0. Если каждую из скобок приравнять к нулю и найти значения неизвестных, получим решение:
х*1=1.01; х*2 = 1.67; х*3 =16.05; х*4 = 10.02.
Подставим найденные значения в полином D(x, s), получим:
Сравним его с эталонным полиномом ![]() . Заметим, что есть небольшое отличие, которое вызвано округлением при расчетах. Проверим полученное решение на предмет удовлетворения показателям качества
. Заметим, что есть небольшое отличие, которое вызвано округлением при расчетах. Проверим полученное решение на предмет удовлетворения показателям качества ![]() , µ, Tрег. Для этого найдем корни
, µ, Tрег. Для этого найдем корни ![]() и проанализируем по ним
и проанализируем по ним ![]() , µ, Tрег, будем иметь:
, µ, Tрег, будем иметь:
![]()
![]() = 2.068, µ = 0, Tрег. = 1.44 (сек).
= 2.068, µ = 0, Tрег. = 1.44 (сек).
Полученный результат подтвердил, что требуемое качество достигнуто.
Задача 2.
Пусть динамика работы объекта управления представлена математической моделью третьего порядка сложности вида:
Пусть заданы требования к качеству управления объектом:
Время регулирования Трег <=1.6 сек.; степень устойчивости η >= 1.9;
колебательность процессов µ <= 1.
В задачу проектирования входит выполнение следующих этапов:
- выбор (синтез) структуры регулятора РГ (ПИД – регулятора);
- поиск параметров выбранной модели РГ в соответствии с решением задачи оптимизации для обеспечения требуемого качества;
- анализ качества синтезированной системы регулирования (САР).
Решение.
Выберем схему САР с ПИД - регулятором в контуре управления (рис. 1).
В данной схеме известны передаточные функции звеньев:



Нужно найти значения вектора параметров регулятора x = ( kp, ki, kd), при которых корни si характеристического уравнения замкнутой системы будут принадлежать области качества W, определяемой заданными в задании на моделирование параметрами: η, µ, Трег .
Для решения задачи будем использовать методику проектирования динамики САР в комплексной плоскости [1] , а расчетах использовать научный пакет программ «Multivariable System Optimization (MSO)» [2-3].
Характеристическое уравнение САР в параметрической форме, построенное с помощью программы gen1.exe имеет вид:
 .
.
Для поиска решения необходимо задать корни характеристического уравнения эталонной САР, для назначения которых используются заданные значения η, µ, Трег :



 .
.
С помощью программы gen3.exe по корням было получено эталонное характеристическое уравнение эталонной САР:
 .
.
Составим функцию качества ![]() за счет минимизации средней квадратичной ошибки аппроксимации:
за счет минимизации средней квадратичной ошибки аппроксимации:
 .
.
Решим задачу оптимизации градиентным с помощью программы gen7.exe, получим:


 .
.
Для найденных значений вектора x пересчитаем характеристическое уравнение САР, получим:
 .
.
Как видим, оно практически совпадает с эталонным.
Теперь выполним анализ качества САР с помощью программы gen2.exe, получим: время регулирования Трег =1.51 сек.; степень устойчивости η = 1.98;
колебательность процессов µ = 0.
Проведем анализ качества синтезированной САР по переходной и частотной характеристикам, для этого воспользуемся программами gen5.exe и gen6.exe. Переходная характеристика САР будет иметь вид (рис.2): 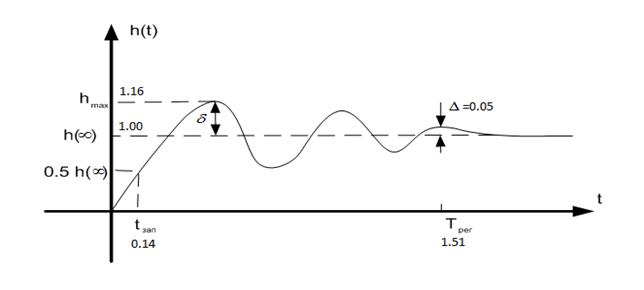
Рис.7. Переходная характеристика САР
Частотная характеристика САР будет иметь вид (рис.3): 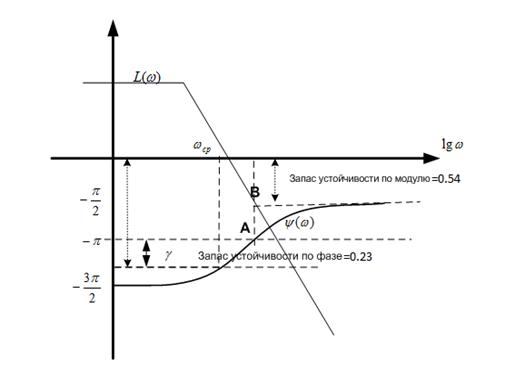
Рис.8. Частотная характеристика САР
Проведя анализ САР по графикам, получаем результаты, схожие с результатами, полученными в программе gen2.exe, тем самым подтверждаем выполнимость заданных требований к качеству работы ОР в системе автоматического регулирования.
Литература
1. Прохорова теории управления. Учебно - методический комплекс. Москва: АПКиППРО, 2008. – 130 с.
2. Прохорова теории управления. Лабораторный практикум.
Москва: АПКиППРО, 2008. – 36 с.
3. Прохорова проектирование систем управления.
Учебно-методическое пособие. Москва: АПКиППРО, 2008. – 24 с.
