
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 531; 622
Модель расчёта горизонтальной силы, действующей на направляющие вертикального подъёмника (в одномерном случае) и её приложения.
,
Пермский государственный национальный
исследовательский университет, ММФ
Россия, 5,
*****@***ru .
В данной статье рассматривается упрощённая модель реального технического грузоподъёмника, её анализ, нахождение способа оценки её текущего состояния, поиск участков, в которых имеется наибольшая поперечная сила, действующая на направляющие подъёмника.
Ключевые слова: вертикальный грузоподъёмник, мониторинг состояния, линия регрессии, сила по нормали.
Ó , , 2013.
1. Предисловие
Грузовые вертикальные подъемники применяются в горнодобывающем производстве. При аварии такой конструкции предприятие несёт существенные материальные убытки, выраженные в простое производственной линии и затратах на аварийный ремонт. Задача мониторинга состояния вертикального подъёмника является актуальной.
2. Общий обзор конструкции
Шахта грузоподъёмника представляет собой металлоконструкцию. Она служит направляющей для вертикального движения грузонесущего элемента конструкции, см. рис. 1 [1, 7]. Металлоконструкция шахты обычно имеет прямоугольное сечение. Она состоит из четырех вертикальных стержней, расположенных по углам шахты, диагонально расположенных стержней, а также горизонтальных стержней. Диагонально и горизонтально расположенные стержни обеспечивают жесткость конструкции. Грузонесущий элемент подъемника движется по направляющим, приводится в движение при помощи вертикального троса.

Рис. 1. Направляющие подъёмника.
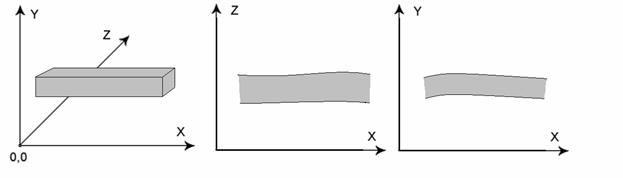
Рис. 2. Проекции элемента направляющей на взаимно перпендикулярные плоскости
На данном этапе работы рассматривается влияние кривизны направляющей на силу нормальную по отношению к движению груза только в одной плоскости. Также будем считать, что направляющая имеет однородную структуру и сила, действующая на неё на каком-либо её участке, зависит лишь от её формы на этом участке, см. рис. 2. В качестве модели будем рассматривать плоский случай движения тела по кривой
3. Решение плоской задачи.
Рис. 3. Плоская диаграмма сил
(х — вертикальная координата подъёмника, у — горизонтальная).
При криволинейном движении скорость направлена по касательной к траектории, см. рис. 3 [2, 5]
Поскольку направление скорости постоянно изменяется, то криволинейное движение — всегда движение с ускорением, в том числе, когда модуль скорости остается неизменным.
Составляющая ускорения, направленная вдоль скорости, называется тангенциальным ускорением![]() . Она характеризует изменение скорости по модулю. Составляющая ускорения, направленная к центру кривизны траектории, т. е. перпендикулярно скорости, называется нормальным ускорением
. Она характеризует изменение скорости по модулю. Составляющая ускорения, направленная к центру кривизны траектории, т. е. перпендикулярно скорости, называется нормальным ускорением![]() . Она характеризует изменение скорости по направлению.
. Она характеризует изменение скорости по направлению.
Вектор ускорения при криволинейном движении
![]()
Так как во время движения отсутствует изменение модуля скорости, то тангенциальное ускорение можно не учитывать.
Если материальная точка обладает массой, то при её движении по кривой будет возникать сила, сонаправленная с нормальным ускорением точки, а также равная ей и противоположная по направлению сила реакции. Именно наличие этих сил приводит к возникновению напряжённо-деформированного состояния элементов конструкции.
При рассмотрении плоской задачи решение сводится к нахождению возникающей при движении материальной точки нормальной силы в любой точке кривой. Так как масса грузоподъёмного элемента постоянна, цель задачи – определение модуля нормального ускорения в точках кривой.
При решении реальной задачи данные о кривой получаемы посредством некоторого эксперимента, например измерением расстояний от точек прямой, параллельной вертикальной оси до точек кривой.
Для того, чтобы задать табличную функцию, описывающую кривую, требуется найти способ измерения расстояний от некоторой прямой до точек кривой. Прямая будет представлять собой вертикальную ось, протяжённостью на всю глубину шахты.
Введём на прямой сетку с шагом h (![]() ). Так как шахта имеет ограничение по высоте, возможно введение равномерной сетки по всей длине измерительной прямой. В каждой точке
). Так как шахта имеет ограничение по высоте, возможно введение равномерной сетки по всей длине измерительной прямой. В каждой точке ![]() будет располагаться измеритель расстояния, направленный в сторону кривой. Таким образом, получим пары точек (
будет располагаться измеритель расстояния, направленный в сторону кривой. Таким образом, получим пары точек (![]() ). От выбора шага сетки h будет зависеть ошибка вычисления ускорения в точках кривой (в рассматриваемом модельном случае считаем шаг равномерным, в случае неравномерного шага используются соотсветствующие аппроксимации.).
). От выбора шага сетки h будет зависеть ошибка вычисления ускорения в точках кривой (в рассматриваемом модельном случае считаем шаг равномерным, в случае неравномерного шага используются соотсветствующие аппроксимации.).
Центральная разность аппроксимирует вторую производную с ошибкой ![]() [3, 4]: r'' »
[3, 4]: r'' »![]() +
+ ![]()
В данной задаче также присутствует погрешность измерения расстояний, связанная с погрешностью приборов. Следует выбирать шаг сетки таким образом, чтобы погрешности вычислений, связанные с введением сетки и с неточностью датчиков, были одного порядка.
Также необходимо определить начальные физические параметры системы: 1. постоянную скорость движения грузоподъёмного элемента, 2. массу загруженного грузоподъёмного элемента, 3. предельно допустимую поперечную силу, которую выдерживают направляющие, превышение значения которой ведёт к поломке конструкции и аварии.
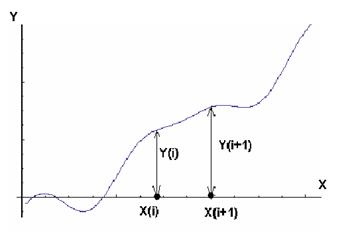
Рис. 4. Схема измерений.
4. Имитационный пример рассчёта
Проверка схемы вычислений выполнена на имитационных данных.
Так как отсутствуют реальные данные с датчиков, необходимо самостоятельно задать массивы хi и уi (пары точек, необходимые для табличного задания функции, описывающей рассматриваемую кривую), см. рис. 4:
 ,
,

Построим по данным (![]() ) линию регрессии и возьмём её в качестве новой оси X*, см. рис. 5.
) линию регрессии и возьмём её в качестве новой оси X*, см. рис. 5.
Таблично заданная кривая и линия регрессии:
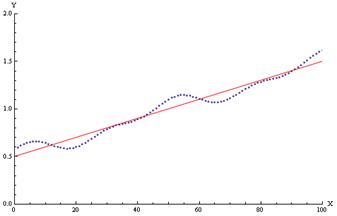
Рис. 5. Перенос оси на линию регрессии.
Будем измерять расстояния от точек кривой до точек регрессионной прямой, и на основе этих измерений оценивать модуль нормального ускорения при движении тела по кривой.
Пусть ![]() - линия регрессии [6], тогда:
- линия регрессии [6], тогда:
![]() ,
,
Вторая производная ![]()
![]() ,
,
Радиус кривизны кривой приближённо определяется о формуле R![]()
![]() .
.
Модуль нормального ускорения ![]() .
.
Сила, действующая перпендекулярно направляющим, приближённо: Fn=M*.
Результат примера расчета приведён в табл. 1, 2.
Таблица 1. Входные данные задачи
Скорость, м/с | Масса, кг | h, м | Коэффициенты имитационной модели | |||
k1 | k2 | k3 | k4 | |||
7 | 9500 | 1 | 0.045 | 3.8 | 0.075 | 7.8 |
Таблица 2. Расчетные данные
Номер точки измерения, i | Значение вертикальной координаты X(i)=h*I, м | Отклонение от реперной прямой dyi, м | Значение силы, Н |
2 | 2 | 0.6152 | 1248.27 |
3 | 3 | 0.6315 | 1583.34 |
4 | 4 | 0.6445 | 1742.37 |
5 | 5 | 0.6537 | 1875.62 |
6 | 6 | 0.6589 | 1837.09 |
7 | 7 | 0.6601 | 1739.77 |
… | … | … | … |
53 | 53 | 1.1397 | 1922.47 |
… | … | … | … |
95 | 95 | 1.5136 | 382.88 |
96 | 96 | 1.5384 | 738.836 |
97 | 97 | 1.5617 | 1127.52 |
98 | 98 | 1.5825 | 1419.05 |
99 | 99 | 1.6003 | 1696.67 |
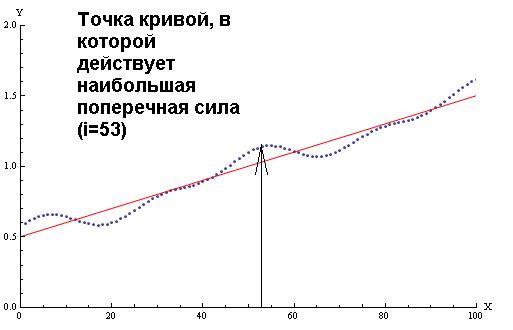
Рис. 6. Местоположение максимума поперечной силы.
График действующей поперечной силы в различных точках кривой приведён на рис. 7. Определение местоположения максимума модуля поперечной силы позволяет рекомендовать выполнение профилактического ремонта по спрямлению критичного участка для уменьшения поперечной силы, действующей на направляющие.
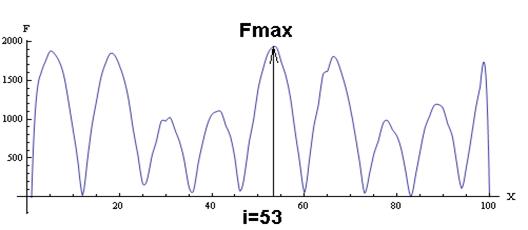
Рис. 7. График модуля поперечной силы.
5. Заключение.
В данной работе построена и исследована упрощённая модель конструкции. В реальности требуется учёт наличия нескольких направляющих, двумерной совокупности измерений и неравномерного шага измерений по вертикали.
Приведённый пример показывает принципиальную возможность решения задачи нахождения координаты места приложения наибольшей нормальной силы, действующей на направляющие, необходимые для локализации места профилактического ремонта направляющих
Библиографический список
1. Строительные машины. М.: Высшая школа, 1988
2. Ландау, Л. Д., Лифшиц, Е. М. Механика. М.: Физматлит, 2004 («Теоретическая физика», том I)
3. , П., Методы вычислений, 3 изд., т. 1, М., 1966; 2 изд., т. 2, М., 1962
4. , Введение в теорию разностных схем. — М.: Физматгиз, 1962
5. , Курс теоретической механики, 8 изд. СПб: Лань, 2001
6. Вероятность и математическая статистика. Энциклопедия, Гл. ред. Ю. В. Прохоров. - М.: Большая Российская Энциклопедия, 1999.
7. Строй-техника [Электронный ресурс] [Режим доступа: http://*****/article/shakhty-podemnikov]
Calculation model of horizontal force acting on the vertical lift rails (one-dimensional case) and its Applications.
Chechulin V. L., Rachmanov A. Yu.,
Perm State University, MMF
Russia, Perm, Bukirev st., 15.
*****@***ru
This article describes a simplified model of the real technical forklift, analysis, finding a way to assess its current state, the search for areas in which the greatest probability of an accident. Keywords: the regression line, forklift, status monitoring.
Ó Chechulin V. L., Rachmanov A. Yu., 2013.
