
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Машина перегрузочная МПК с гибким подвесом объектов перегрузки для реакторных установок типа ВВЭР
, ,
(ВИС ЮРГУЭС, Волгодонск, Россия)
Применяемые в настоящее время машины перегрузочные (МП) для водо-водяных реакторов типа ВВЭР отличаются большой сложностью, многозвенностью конструктивной схемы с жестким подвесом исполнительного органа – рабочей штанги. Вес МП составляет более 84 т, рабочей штанги – более 12 т; длина исполнительного органа (ИО) - телескопической рабочей штанги – более 11 м. Соответственно конструкция МП-1000 характеризуется большим количеством деталей, одних наименований которых более 2500.
Конструкция МП выполнена по известным схемам манипуляционных роботов. Следование этим схемам проектирования привело к сложным конструкторским решениям. Точность наведения рабочей штанги на объект требуется обеспечить в пределах ±2…3 мм. При пути перемещения объекта по высоте до 10 м и по горизонтали до 20 м требуется обеспечение высокой геометрической точности не только сопрягаемых подвижных поверхностей жестких длинных звеньев МП, но и подкрановых путей; особой точности требует обеспечение процесса наведения на объект по горизонтали и вертикали с использованием электрического привода.
Вариант применения МП с гибким подвесом ИО детально не рассматривался. Решение об отказе от применения гибкого подвеса было принято при отсутствии устройств, которые в таком варианте конструктивной схемы могли бы поворачивать объект относительно вертикальной оси с приложением существенного крутящего момента [1].
Логическая схема для предварительного сравнения надежности конструктивных схем перегрузки объектов с жестким и гибким подвесом исполнительного органа для захвата объекта представлена на рисунке.
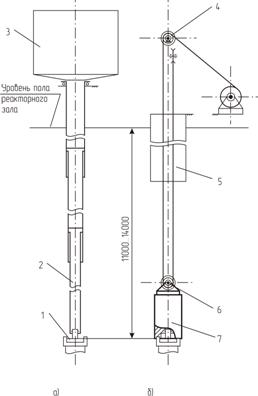
Схема для сравнения конструктивных вариантов МП: а) с жестким подвесом; б) с гибким (канатным) подвесом исполнительного органа
Схема представляет собой объект 1 в виде крышки гермопенала, которую нужно открыть с приложением крутящего момента МКР=1000Нм относительно вертикальной оси симметрии. В варианте а это происходит за счет поворота жесткой рабочей штанги 2 относительно вертикальной оси.
Машина перегрузки 3 в этом случае получается громоздкой и массивной. Заметим, что при проектировании такой конструкции МП предусматривались условия обеспечения безопасного подрыва кассет в случае их прикипания; в практике эксплуатации МП таких случаев не было.
С применением гибкого канатного подвеса 4 с подъемной лебедкой крана с двойным полиспастом, к нижним блокам 6 которого подвешен исполнительный орган 7, захватывающий и поворачивающий объект под действием собственного и дополнительного веса, система явно упрощается. Тонкостенная трубная секция 5 служит только для страховки исполнительного органа вместе с объектом во время транспортировки в горизонтальной плоскости.
Предварительные ориентировочные расчеты показывают, что предложенная система с гибким подвесом ИО весит не более 8т. Это на порядок ниже применяемой системы с жестким подвесом.
Применение современных средств мехатроники в процессе наведения ИО на координаты объекта позволяет существенно упростить систему управления МПК.
Одной из основных причин отказа от гибкого подвеса было недоверие к конструкциям канатного подвеса, априори считающегося менее надежным, чем жесткая сплошная металлическая конструкция. Однако, согласно теории надежности, стальной канат, как соединение из множества параллельных элементов, при увеличенных коэффициентах запаса, является более надежным, чем сплошная однородная металлическая конструкция с последовательно соединенными элементами.
Логическая схема является только исходной базовой. Для сравнения уровня надежности требуется конкретный расчет обеих схем по всем элементам.
Комплексный анализ указанной предпроектной схемы показывает перспективность применения системы с гибким подвесом ИО.
Теоретически доказана [2] работоспособность устройства поворота и захвата пробки гермопенала, изготовлена и успешно испытана в лабораторных условиях модель подъемного и автоматического захватного устройства.
Принятие решения о практической применимости предложенной конструктивной схемы может быть обосновано при сравнительных комплексных испытаниях натурного образца МПК
На принятые решения авторами получены положительные решения на выдачу трех патентов на изобретения.
Список литературы:
1. , Яблоновский конструктивных схем машин перегрузочных с жестким и гибким подвесом исполнительного органа // Машиностроение и техносфера XXI века // Сборник трудов XIII международной научно-технической конференции в г. Севастополе 11-16 сентября 2006 г. В 5-ти томах. – Донецк: ДонНТУ, 2006. Т. 2. – 324 с.
2. , , Яблоновский обоснование работоспособности подвесного устройства для поворота пробки пенала в реакторе типа ВВЭР //Известия высших учебных заведений. Северо-Кавказский регион. Серия «Технические науки».№4, 2007.
Авторы: __________
__________
__________
