
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Тема 4
Физические поля
Тематика этой лекции имеет вспомогательный и общеобразовательный характер, так как предваряет переход к изучению динамики поступательного движения. Как мы уже знаем, существует 4 вида фундаментальных взаимодействий, для описания которых мы введем новое понятие.
Физическим полем называется изменение свойств пространства, вызванное наличием источника данного поля.
Таким образом, существуют как минимум гравитационное, электромагнитное, слабое и сильное поля.
Рассмотрим два связанных между собой мысленных эксперимента, иллюстрируемых рисунком 1. Необходимо подчеркнуть, что это не реальные, а именно мысленные эксперименты, которые не могут быть напрямую реализованы в действительности, но, с другой стороны, выявляют наиболее существенные черты большого количества реальных опытов.
Рис. 1
Опишем указанные эксперименты. Для конкретности будем рассматривать электрическое поле, однако аналогично можно рассмотреть любые другие поля. В первом эксперименте (верхняя часть рисунка 1) в точках 1 и 2, отстоящих друг от друга на расстояние ![]() , одновременно появляются два электрических заряда. При этом взаимодействие начинается не сразу, а через промежуток времени
, одновременно появляются два электрических заряда. При этом взаимодействие начинается не сразу, а через промежуток времени ![]() . Во втором эксперименте (нижняя часть рисунка) в точку 1 помещаем электрический заряд и ждем в течение промежутка времени, большего
. Во втором эксперименте (нижняя часть рисунка) в точку 1 помещаем электрический заряд и ждем в течение промежутка времени, большего ![]() , после чего в точку 2 помещаем второй заряд. В этом случае взаимодействие начинается сразу. Из этого можно сделать вывод, что характерными свойствами поля являются:
, после чего в точку 2 помещаем второй заряд. В этом случае взаимодействие начинается сразу. Из этого можно сделать вывод, что характерными свойствами поля являются:
1 конечная скорость распространения
2 существование частицы - переносчика поля.
Теперь необходимо ввести характеристики поля.
Силовой характеристикой любого физического поля является его напряженность
Рассмотрим известные выражения для напряженностей некоторых фундаментальных взаимодействий.
Если источником гравитационного поля является материальная точка массой ![]() , положение которой задается радиус-вектором
, положение которой задается радиус-вектором ![]() , то напряженность гравитационного поля в точке
, то напряженность гравитационного поля в точке ![]() вычисляется по формуле (см. рисунок 2)
вычисляется по формуле (см. рисунок 2)
 |
где  - гравитационная постоянная.
- гравитационная постоянная.
Тогда для модуля вектора напряженности гравитационного поля получим известную формулу
соответствующую закону обратных квадратов. Здесь ![]() - расстояние между двумя точками.
- расстояние между двумя точками.
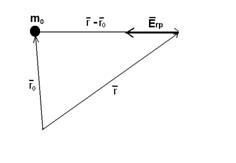
Рис. 2
Заметим, что вектор напряженности гравитационного поля всегда направлен в сторону источника поля (поле притяжения).
Силовой характеристикой электрического поля является вектор напряженности поля.
Если источником электрического поля является материальная точка с электрическим зарядом ![]() , положение которой задается радиус-вектором
, положение которой задается радиус-вектором ![]() , то напряженность электрического поля в точке
, то напряженность электрического поля в точке ![]() вычисляется по формуле
вычисляется по формуле
(см. рисунок 3) где
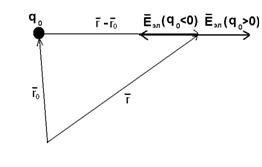
Рис. 3
В отличие от гравитационного электрическое поле может быть как полем притяжения, так и полем отталкивания.
Силовой характеристикой магнитного поля является вектор индукции магнитного поля ![]() .
.
Если источником магнитного поля является движущаяся со скоростью ![]() материальная точка с электрическим зарядом
материальная точка с электрическим зарядом ![]() , положение которой задается радиус-вектором
, положение которой задается радиус-вектором ![]() , то индукция магнитного поля в точке
, то индукция магнитного поля в точке ![]() вычисляется по формуле (см. рисунок 4)
вычисляется по формуле (см. рисунок 4)
где с – скорость света, а крестик обозначает векторное произведение.
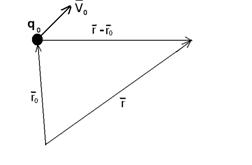
Рис. 4
Представленные выше формулы справедливы для случаев единственного точечного источника. В реальной жизни такие случаи не реализуются. Чтобы понять, как вычислить напряженность при наличии нескольких источников, воспользуемся одним из важнейших законом классической физики - принципом суперпозиции.
Принцип суперпозиции
 напряженность поля от нескольких источников равна векторной сумме напряженностей от каждого из источников
напряженность поля от нескольких источников равна векторной сумме напряженностей от каждого из источников
На рисунке 5 проиллюстрирован принцип суперпозиции для 3 источников электрического поля. Показана последовательность сложений напряженностей одиночных источников для определения вектора суммарной напряженности.
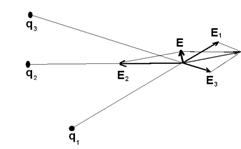
Рис. 5
Для приложений, однако, более интересны характеристики взаимодействия тел, чем характеристики полей.
Сила.
Основной характеристикой взаимодействия является сила. Знание напряженности позволяет рассчитывать силу данного взаимодействия.
На материальную точку массой m, находящуюся в точке с радиус-вектором ![]() , действует гравитационная сила
, действует гравитационная сила

На материальную точку с электрическим зарядом q, находящуюся в точке с
радиус-вектором ![]() , действует электрическая сила
, действует электрическая сила
 На электрический заряд q , движущийся в магнитном поле со скоростью
На электрический заряд q , движущийся в магнитном поле со скоростью ![]() , действует магнитная сила - сила Лоренца
, действует магнитная сила - сила Лоренца
Характер рассмотренных выражений позволяет утверждать, что принцип суперпозиции справедлив также и для сил.
Все полученные до сих пор формулы относятся к силам между материальными точками или их системам. В реальной жизни необходимо уметь вычислять силы между телами конечных размеров.
Вычисление сил между телами конечных размеров
Рассмотрим возможный алгоритм определения силы между двумя телами на основе принципа суперпозиции. Разделим каждое из тел на большое количество частей (![]() для первого тела,
для первого тела, ![]() - для второго), каждую из которых можно считать материальной точкой, перенумеруем материальные точки каждого тела индексом i для первого тела и индексом j – для второго (см. рисунок 6). Так как выражение для силы взаимодействия между двумя материальными точками
- для второго), каждую из которых можно считать материальной точкой, перенумеруем материальные точки каждого тела индексом i для первого тела и индексом j – для второго (см. рисунок 6). Так как выражение для силы взаимодействия между двумя материальными точками ![]() известно, то выражение для результирующей силы может быть получено суммированием по обоим индексам
известно, то выражение для результирующей силы может быть получено суммированием по обоим индексам
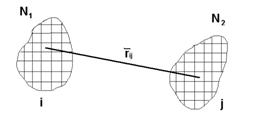
Рис. 6
Однако, как показывают проведенные оценки этот алгоритм для двух реальных тел не может быть реализован, так как требует слишком много машинного времени (больше времени существования Вселенной). Таким образом, необходимы принципиально другие подходы к определению сил между телами конечных размеров. Выделим два основных подхода: выражения для моделей тел и эмпирические выражения для сил
1. Выражения для моделей тел
В этом случае рассматриваются тела простой формы с простым непрерывным распределением источников поля по объему тела. Тогда сумма преобразуется в интеграл, который для простых тел и распределений может быть взят аналитически или численно с любой заданной степенью точности. В качестве тел обычно используются шары, эллипсоиды, кубы, плоскости и т. д. Например, гравитационная сила между двумя телами с заданными распределениями плотности ![]() и
и ![]() (где
(где ![]() и
и ![]() - радиус-векторы точек внутри первого и второго тела соответственно) определяется интегрированием по объемам обоих тел
- радиус-векторы точек внутри первого и второго тела соответственно) определяется интегрированием по объемам обоих тел
 Если в качестве тел рассмотреть шары с равномерным или центрально симметричным распределением, то интеграл берется аналитически и окончательное выражение для модуля силы имеет простой вид
Если в качестве тел рассмотреть шары с равномерным или центрально симметричным распределением, то интеграл берется аналитически и окончательное выражение для модуля силы имеет простой вид
где ![]() и
и ![]() - массы тел,
- массы тел, ![]() - расстояние между центрами шаров. Полученное выражение совпадает с формулой для материальных точек, к которой оно и должно сходиться для больших
- расстояние между центрами шаров. Полученное выражение совпадает с формулой для материальных точек, к которой оно и должно сходиться для больших ![]() .
.
2. Эмпирические выражения для сил
Эти выражения получены при математической обработке результатов натурных экспериментов. Они, конечно, носят приближенный характер, но зато обычно имеют простой и удобный вид. Рассмотрим несколько эмпирических выражений для сил, которые потребуются нам в дальнейшем.
Сила тяжести
Сила тяжести это сила гравитации вблизи поверхности Земли. Некорректное выражение « вблизи поверхности Земли» означает выполнение 2 условий:
 (см. рисунок 7). При этом выражение для силы тяжести следующий вид
(см. рисунок 7). При этом выражение для силы тяжести следующий вид
где ![]() - постоянный вектор с такими свойствами
- постоянный вектор с такими свойствами
1) ![]() перпендикулярен поверхности Земли и 2)
перпендикулярен поверхности Земли и 2) ![]() . Безусловно, эти свойства справедливы в модели плоской однородной Земли, а для реальной планеты они могут быть приняты как приближенные с учетом ее вращения и неравномерного распределения массы внутри планеты.
. Безусловно, эти свойства справедливы в модели плоской однородной Земли, а для реальной планеты они могут быть приняты как приближенные с учетом ее вращения и неравномерного распределения массы внутри планеты.
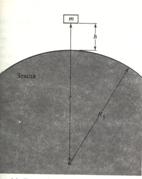

Рис. 7
Контактные силы
Контактные силы это силы, возникающие при непосредственном соприкосновении тел. Например, они возникают, когда мы опираемся рукой на стол или прислоняемся спиной к стене. Контактные силы имеют электромагнитную природу, то есть являются результатом сложения очень большого количества взаимодействий между приповерхностными атомами двух тел. Это сложное взаимодействие сводится к двум силам: реакция опоры ![]() и сила сухого трения
и сила сухого трения ![]() (см. рисунок 8), которые обладают следующими свойствами
(см. рисунок 8), которые обладают следующими свойствами
1) Сила реакции опоры перпендикулярна поверхности соприкосновения.
2) Сила трения параллельна поверхности соприкосновения.
3) Направление силы трения противоположно направлению движения.
4) Для характеристики силы трения вводится коэффициент трения
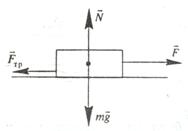
Рис. 8
5) Коэффициент трения не зависит от величины силы реакции опоры и площади поверхности соприкосновения.
6) Коэффициент трения зависит от вида материалов тел, качества обработки поверхности (см. рисунок 9) и относительной скорости (рисунок 10).
Рис. 9
Сделаем несколько комментариев относительно перечисленных свойств.
1) Если тело не движется, то сила трения или отсутствует или противоположна приложенной к телу горизонтальной силе.
2) Независимость от величины силы реакции опоры и площади поверхности соприкосновения устанавливается экспериментально.
3) Зависимость от качества обработки поверхности (степени шероховатости поверхности) немонотонная – минимальный коэффициент трения для некоторой конечной степени шероховатости.
4) ![]() Экспериментально определенные коэффициенты трения для пары материалов поверхностей сведены в специальные таблицы. Зная эти коэффициенты, можно вычислять силу трения по формуле
Экспериментально определенные коэффициенты трения для пары материалов поверхностей сведены в специальные таблицы. Зная эти коэффициенты, можно вычислять силу трения по формуле
5) Формулы для силы трения и коэффициента трения математически эквивалентны, но принципиально отличны с точки зрения физики, так как одна позволяет создавать таблицы на основе экспериментальных данных, а другая использует эти таблицы при решении расчетных задач.

Рис. 10
6) Зависимость коэффициента трения от скорости, изображенная на рисунке 10, носит немонотонный характер и в целях наглядности изображена гиперболизированной – в реальности величина провала (падения) в коэффициенте трения не превосходит 1-2 процентов от значения при нулевой скорости. Поэтому в большинстве задач можно не учитывать зависимость коэффициента трения от скорости. Однако существуют явления, которые не могут быть объяснены без учета рассматриваемой зависимости. Например, скрип открываемой двери или игра смычком на скрипке.
Сила упругости.
Рассмотрим деформацию абсолютно упругого тела (см. рисунок 11). Для него справедлив закон Гука
Здесь ![]() - сила упругости, то есть сила, возникающая внутри тела и препятствующая дальнейшей деформации тела (см. рисунок 12),
- сила упругости, то есть сила, возникающая внутри тела и препятствующая дальнейшей деформации тела (см. рисунок 12), ![]() - постоянный коэффициент.
- постоянный коэффициент.


Рис. 11 Рис. 12
Свойства коэффициента k:
1. Не зависит от величины силы.
2. Зависит от материала и размеров.
Также возможна запись закона Гука в независящем от размеров виде, однако нам она не потребуется.
Сила вязкого трения.
Сила вязкого трения это сила, препятствующая движению тела в среде.
Мы ощущаем эту силу, например, когда вбегаем в воду или быстро едем на велосипеде.
Для малых скоростей ![]() сила вязкого трения вычисляется так
сила вязкого трения вычисляется так
Свойства коэффициента пропорциональности ![]()
Зависит от вязкости среды (соответствующего свойства любой жидкости или газа).
Зависит от размеров тела.
Зависит от формы тела.
Зависит от ориентации вектора скорости (см. рисунок 13).
Рис. 13
То есть коэффициент ![]() будет разным для каждого из 3 изображенных векторов скорости.
будет разным для каждого из 3 изображенных векторов скорости.
Если не ограничиваться малыми скоростями, то вид зависимости силы вязкого трения от скорости имеет вид, изображенный на рисунке 14.
Рис 14
Видно, что с увеличением скорости зависимость из линейной переходит в квадратичную. В связи с этим возникает понятие экономичной скорости, то есть максимальной скорости, для которой зависимость еще линейна. Проще всего это понятие ощутить по количеству бензина, требуемому автомобилю на преодоление 100 км. После скорости 60 км в час это количество начинает постепенно расти.
