

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ИДЕНТИФИКАЦИЯ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ СИСТЕМ С НЕПОЛНОЙ МАТРИЦЕЙ НАБЛЮДЕНИЙ.
, (г. Иркутск, ИрГТУ).
Процессы, протекающие во многих технических системах, описываются уравнениями авторегрессии – проинтегрированного скользящего среднего (АРПСС). Следовательно, для идентификации таких систем неоходимо построить соответствующие модели. Методика построения динамических стохастических моделей – моделей АРПСС отработана и успешно применяется на практике.
Однако, если результаты наблюдений представлены в виде функций от интересующих исследователя величин (в общем случае – в виде векторных функций), задача идентификации значительно усложняется.
В докладе рассмотрены методы идентификации систем с неполной матрицей наблюдений, основанные на минимизации суммы квадратов отклонений вектора наблюдений в моменты времени t от его прогнозов, вычисленных на основе динамических стохастических моделей. Приводятся результаты моделирования предложенных алгоритмов.
В динамических системах вектор состояния Y зависит от времени t, т. е. Y=Y(t). В случае дискретного времени поведение таких систем можно описать уравнениями [1].
Yk+1 = ФYk + ГWk (1)
Zk = HYk + Vk ,
где Ф – матрица переходов;
Yk – вектор состояния системы в момент k;
Г – матрица коэффициентов усиления шумов;
Wk – вектор шумов;
Zk – вектор наблюдений;
Н – матрица наблюдений;
Vk – вектор шумов измерений.
Оптимальные оценки подобных систем можно получить с помощью соотношений, известных как фильтр Калмана.
Измерительная информация, получаемая в процессе функционирования многих реальных систем, представляет собой разности ![]() составляющих вектора Y. К таким системам относятся, например, групповые эталоны, в частности, эталоны времени и частоты, где показания всех элементов – часов эталона – сравниваются с показаниями опорного элемента. Это позволяет произвести декомпозицию многомерной системы, т. е. перейти от матричных уравнений (1) к системе скалярных уравнений. При этом оценка состояния опорного элемента находится по формуле:
составляющих вектора Y. К таким системам относятся, например, групповые эталоны, в частности, эталоны времени и частоты, где показания всех элементов – часов эталона – сравниваются с показаниями опорного элемента. Это позволяет произвести декомпозицию многомерной системы, т. е. перейти от матричных уравнений (1) к системе скалярных уравнений. При этом оценка состояния опорного элемента находится по формуле:
 , (2)
, (2)
где ![]() – прогноз, вычисленный на предыдущем такте.
– прогноз, вычисленный на предыдущем такте.
Прогнозы составляющих вектора состояния на один шаг вперед - ![]() получаются на основе уравнений авторегрессии проинтегрированного скользящего среднего (АРПСС):
получаются на основе уравнений авторегрессии проинтегрированного скользящего среднего (АРПСС):
где  − вектор параметров модели АРПСС i- го элемента;
− вектор параметров модели АРПСС i- го элемента;
![]() - вектор состояния прогнозируемого процесса для i - го элемента;
- вектор состояния прогнозируемого процесса для i - го элемента;
р - порядок авторегрессии (АР);
q - порядок скользящего среднего (СС);
φ - обобщенные коэффициенты АР;
θ - коэффициенты СС;
![]() - ошибка j- го прогноза;
- ошибка j- го прогноза;
θ0 - свободный член.
По найденной оценке состояния опорного элемента ![]() оценки остальных составляющих вектора Y=[y1, y2,…,yn]T вычисляются непосредственно из результатов измерений, выполняемых в момент t:
оценки остальных составляющих вектора Y=[y1, y2,…,yn]T вычисляются непосредственно из результатов измерений, выполняемых в момент t:
zi(t) = y1(t) - yi(t) (3)
(4)
Таким образом, задача идентификации систем, описываемых уравнениями (2) и (3), сводится к задаче построения стохастических динамических моделей – моделей АРПСС [2], адекватных процессам изменения вектора состояния системы.
Существуют программные комплексы, позволяющие строить модели АРПСС по имеющимся в наличии у исследователя временным рядам. Наиболее широко применяется так называемая методика Бокса-Дженкинса, которая использовалась при разработке алгоритмов оценивания состояния группового эталона в режиме реального времени [3]. Исходные временные ряды при этом представляют собой оценки значений относительных отклонений частот водородных генераторов от приписанных им значений и были получены в результате анализа всей доступной к моменту оценивания информации, т. е. не являлись оценками реального времени.
Наличие таких временных рядов является скорее исключением, нежели правилом. Чаще всего исходная информация представляет собой результаты наблюдений, связанные с вектором состояния динамических систем некоторой функциональной зависимостью. В групповых эталонах эта зависимость линейная, т. е. вектор измерения Z(t) связан с вектором состояния Y(t) соотношением
Z(t) = HY(t) (5)
где матрица Н имеет вид [3]
Размерность матрицы Н равна (n-1*n), т. е. система недоопределена, и по результатам наблюдений нельзя найти единственное решение уравнения (5). Стало быть, невозможно использовать методику Бокса-Дженкинса для идентификации подобных систем.
В работе [4] предложено для решения задачи идентификации минимизировать сумму квадратов отклонений наблюденных значений zij от их прогнозов
![]() (6)
(6)
Так как прогнозы вычисляются на основе моделей АРПСС, то функционал зависит от векторов параметров наблюдений βi, т. е.
J=J(β), (7)
где β = [β1; β2; …; βn]T
Результаты моделирования показали хорошую работоспособность предложенного алгоритма при известной структуре моделей, т. е. при известных значениях порядков авторегрессии – pi и скользящего среднего – qi (i = 1, 2,…,n). При увеличении объема выборки l-норма вектора погрешностей оценивания, т. е. l= стремится к нулю (см рис.1).
Рис.1. График зависимости l-нормы вектора погрешностей оценивания от размерности выборки.
Если имеется априорная информация о структуре моделей АРПСС, принципиальных трудностей при построении алгоритма идентификации подобных систем не существует. Если же такой информации нет, то предлагается следующее решение поставленной задачи.
Так как результаты наблюдений представляют собой разности между значениями опорного элемента и остальными составляющими вектора состояния в моменты tj, т. е.
zi = y1 – yi, i = 2, 3,…,n, j = 1, 2,…,N,
то они могут быть описаны моделями временных рядов.
Если модель авторегрессии, которая описывает опорный элемент, имеет порядок p1, а соответствующая модель i-го элемента – порядок p2, то модель АР для результатов наблюдений zi содержит коэффициенты авторегрессии φk, где k = 1, …, ψ, где ψ = max {p1, p2}. Т. е. порядок авторегрессии алгебраической суммы двух временных рядов равен максимальному порядку авторегрессии слагаемых.
Аналогичный вывод можно сделать и для порядков скользящих средних (Для простоты изложения мы рассматриваем только процессы авторегрессии–скользящего среднего, полагая порядок разности d равным нулю. Если все же исходные модели содержат детерминированные тренды, то их влияние на процедуру идентификации нужно предварительно устранить, как это предложено в работе [5]).
На рис.2 показаны временные ряды Y1 и Y2, описываемые моделями АРСС {2,1} и {1,2}.
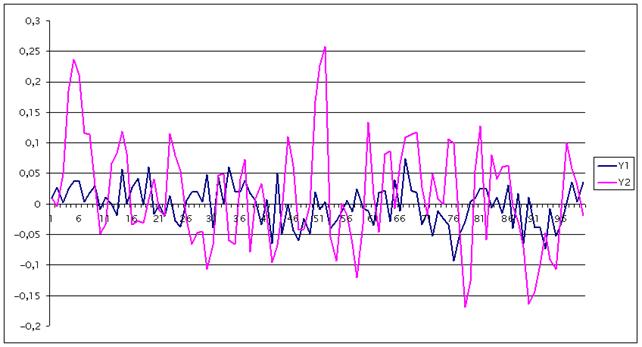
Рис. 2. Графики временных рядов Y1 и Y2.
Суммарный ряд представлен на рис.3. Модель АРСС для данного ряда, построенная по методике Бокса-Дженкинса, имеет следующие параметры: φ1= 0.3, φ2=0.3, θ1=0.35, θ2=0.6.
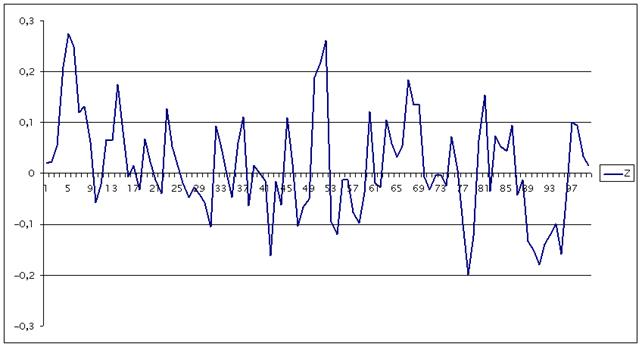
Рис. 3. График суммарного ряда.
Таким образом, предлагается следующая методика построения моделей АРСС для временных рядов Yi по имеющимся результатам zi, связанными с Yi соотношением (5).
1. По имеющимся результатам наблюдений zi(t) (i=1, n=1), представленными временными рядами, строятся модели АРСС по методике Бокса-Дженкинса.
2. Поскольку временные ряды, соответствующие опорному элементу y1(t), входят в каждый из рядов zi, то порядок авторегрессии в модели АРСС для опорного элемента не может превосходить минимального значения Pmin, среди всех моделей, построенных для рядов zi. То же самое следует для порядка скользящего среднего. Иными словами, рассмотрев все модели АРСС, построенные для рядов наблюдений zi, мы выбираем минимальные значения pk и ql и считаем, что они соответствуют модели АРСС для опорного элемента.
3. Порядки АР и СС для всех остальных элементов вектора Y берутся равными pk и ql, если порядки p и q модели, построенные для ряда наблюдений zi, имеют те же самые значения. В противном случае порядки авторегрессии и скользящего среднего для i-ой составляющей вектора Y совпадают с соответствующими порядками для временного ряда zi(t).
4. Полученные данные могут служить первым приближением при решении задачи определения структуры моделей для системы, описываемой уравнениями (3) и (4). Оценки параметров модели и оценка вектора состояния ![]() , для t = 1, …, Т, могут быть найдены при минимизации критерия (6), т. е. с помощью алгоритма, работоспособность которого проверена.
, для t = 1, …, Т, могут быть найдены при минимизации критерия (6), т. е. с помощью алгоритма, работоспособность которого проверена.
Экспериментальная проверка показала работоспособность предложенной методики.
Литература
1. Ли Р. Оптимальные оценки, определение характеристик и управление. – М.: Наука, 1966.
2. Кашьяп динамических стохастических моделей по экспериментальным данным./ , . М.: Наука, 19с.
3. Хрусталёв обработки измерительной информации, получаемой в процессе хранения единиц времени и частоты. В сб. Техника средств связи. Серия «Радиотехнические измерения»./ , . М.: 1986. – 72с.
4. Хрусталёв моделей многомерных временных рядов по результатам наблюдений в динамических системах. В сб. Методы исследования и моделирования технических, социальных и природных систем./ , , . Новосибирск: Наука, 2003. – 307с.
5. Овечкина моделей временных рядов по результатам косвенных измерений. В сб. «Винеровские чтения», изд-во ИрГТУ./ , . Иркутск: 2007.
