

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
СИСТЕМА МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ВСПОМОГАТЕЛЬНЫХ МАШИН ЭЛЕКТРОВОЗОВ
(г. Иркутск, ИрГТУ)
Разработана программа расчета динамических характеристик мотор-вентиляторов (МВ) электровозов нового поколения ЭП-1 и “Ермак”, для моделирования влияния на них различных динамических и кинематических возмущений, возникающих в процессе их эксплуатации.
В настоящее время железнодорожный транспорт России оснащается электровозами нового поколения, в частности пассажирскими электровозами ЭП-1 и электровозами для грузоперевозок «Ермак». Однако, опыт эксплуатации показал, что межремонтный ресурс вспомогательных машин (мотор-вентиляторов, мотор-компрессоров) этих электровозов в 1,5 – 2 раза меньше расчетного. Например, 50% электродвигателей вспомогательных машин выходят из строя при пробеге 150-300 тыс. км., а еще 23% при пробеге 300 – 450 тыс. км вместо расчетных 600 тыс. км.[5]
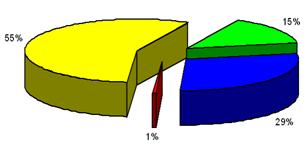
По данным статистики [6], отказы вспомогательных машин составляют до 15% от общего числа отказов электровозов (рис.1). Причинами повреждений мотор-вентиляторов (МВ) являются: неисправность подшипников; пробой изоляции и межвитковое замыкание (МВЗ) статора; выплавление ротора; отгар выводящих проводов (рис.2)
Рис. 1. Анализ отказов оборудования электровозов |
Рис.2. Причины повреждений мотор-вентиляторов: 55 % - неисправность подшипников; 29 % - пробой изоляции и МВЗ статора; 1 % - выплавление ротора; 15 % - отгар выводящих проводов |

В то же время, проведенные исследования и опыт эксплуатации показывает, что вспомогательное машинное оборудование этих электровозов работает в условиях высокой виброактивности. В среднем, уровень вибрации мотор-вентиляторов электровозов, в 1,5 – 2 раза превышает допустимые уровни, что коррелируется с пропорциональным уменьшением их межремонтного ресурса [4,6]. В целом, высокая вибрация негативно влияет не только на работу механического, но и на надежность электрического оборудования, а также на работоспособность и здоровье машинистов.
Математическая модель мотор-вентиялятора. Будем рассматривать мотор-вентилятор, как твердое тело, прикрепленное через упругую подвеску к основанию и имеющее 6 степеней свободы (обобщенных координат ![]() ,
, ![]() ): 3 поступательных (
): 3 поступательных ( ![]() ,
, ![]() , ) и 3 вращательных (
, ) и 3 вращательных (![]() ;
; ![]() ;
;  ). Система координат
). Система координат ![]() – связана с основанием, а система координат
– связана с основанием, а система координат ![]() связана с центром масс мотор-вентилятора. Мотор-вентилятор ориентирован продольной осью
связана с центром масс мотор-вентилятора. Мотор-вентилятор ориентирован продольной осью ![]() параллельно оси ротора электродвигателя. Совместим оси
параллельно оси ротора электродвигателя. Совместим оси ![]() ;
; ![]() ;
; ![]() с главными центральными осями инерции МВ (рис.3).
с главными центральными осями инерции МВ (рис.3).

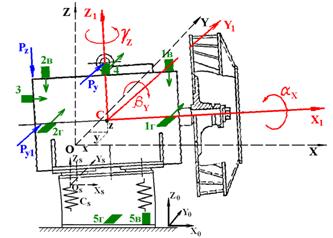
Рис.3. Система координат мотор-вентилятора
Система координат ![]() , совпадает с системой координат мотор-вентилятора -
, совпадает с системой координат мотор-вентилятора -  в положении равновесия при отсутствии линейных и вибрационных ускорений, т. е. в положении покоя электровоза. Вес МВ, линейные и вибрационные нагрузки передаются и воспринимаются через подвеску МВ, в рассматриваемом случае опору коробчатого сечения. Так как опора имеет конечную и распределенную жесткость по всем обобщенным координатам, то в первом приближении заменим ее 4 приведенными упругими элементами, расположенными по углам опоры, имеющими жесткость в трех направлениях осей координат каждого упругого элемента, и в сумме формирующими аналогичную жесткость по обобщенным координатам, что и реальная коробчатая опора (рис.3).
в положении равновесия при отсутствии линейных и вибрационных ускорений, т. е. в положении покоя электровоза. Вес МВ, линейные и вибрационные нагрузки передаются и воспринимаются через подвеску МВ, в рассматриваемом случае опору коробчатого сечения. Так как опора имеет конечную и распределенную жесткость по всем обобщенным координатам, то в первом приближении заменим ее 4 приведенными упругими элементами, расположенными по углам опоры, имеющими жесткость в трех направлениях осей координат каждого упругого элемента, и в сумме формирующими аналогичную жесткость по обобщенным координатам, что и реальная коробчатая опора (рис.3).
Считая линейные и угловые колебания МВ малыми, запишем матричное дифференциальное уравнение колебаний МВ как твердого тела при гармоническом силовом возмущении [4]:
 (1)
(1)
где: ![]() - диагональная матрица инерции твердого тела
- диагональная матрица инерции твердого тела ![]() ;
; ![]() - матрица коэффициентов демпфирования
- матрица коэффициентов демпфирования ![]() ; C – матрица коэффициентов жесткости подвеса
; C – матрица коэффициентов жесткости подвеса ![]() ; Q – вектор комплексных амплитуд обобщенных возмущающих сил;
; Q – вектор комплексных амплитуд обобщенных возмущающих сил; ![]() - частота возбуждения.
- частота возбуждения.
Кинематическое возмущение учитывается в разрабатываемой модели МВ в виде вибросмещения и виброскорости основания в соответствии с уравнением:
 ; (2)
; (2)
Здесь ![]() - вектор вибросмещения основания,
- вектор вибросмещения основания,  - вектор виброскорости основания.
- вектор виброскорости основания.
Диагональная матрица инерции ![]() в уравнениях (1,2) включает элементы:
в уравнениях (1,2) включает элементы: ![]() , где
, где ![]() - масса мотор-вентилятора;
- масса мотор-вентилятора;  ;
; ![]() ;
; ![]() , где
, где ![]() - моменты инерции мотор-вентилятора относительно осей
- моменты инерции мотор-вентилятора относительно осей ![]() ,
,![]() и
и ![]() .
.
Главные оси жесткости образуют систему координатных осей ![]() каждого
каждого ![]() -го приведенного упругого элемента (в рассматриваемом случае
-го приведенного упругого элемента (в рассматриваемом случае ![]() ). Обозначим координаты точек крепления и коэффициенты жесткости
). Обозначим координаты точек крепления и коэффициенты жесткости ![]() -го упругого элемента через
-го упругого элемента через ![]() ,
,![]() ,
,![]() и
и ![]() , ориентацию осей
, ориентацию осей ![]() - ой системы зададим направляющими косинусами углов между главными осями жесткости амортизаторов и осями МВ. Элементы матрицы жесткости С выражаются через коэффициенты жесткости всех упругих элементов, образующих упругий подвес по уравнениям приведенным в работе [2].
- ой системы зададим направляющими косинусами углов между главными осями жесткости амортизаторов и осями МВ. Элементы матрицы жесткости С выражаются через коэффициенты жесткости всех упругих элементов, образующих упругий подвес по уравнениям приведенным в работе [2].
Матрица коэффициентов демпфирования В имеют структуру подобную матрице коэффициентов жесткости, а элементы матрицы определяются используя матрицы А и С по приближенной формуле [1]:
 (3)
(3)
Коэффициенты ![]() и
и ![]() в (3) вычисляются из системы 2-х линейных уравнений:
в (3) вычисляются из системы 2-х линейных уравнений:
где пара коэффициентов демпфирования ![]() находится для каждой пары значений
находится для каждой пары значений ![]() и
и ![]() из уравнения:
из уравнения: ![]()
где ![]() - коэффициент демпфирования в реальных системах подвески.
- коэффициент демпфирования в реальных системах подвески.
Уравнения движения МВ и условия рационального монтажа упругого подвеса. Для принятой схемы приведения подвески МВ координаты точек крепления и направляющие косинусы 4-х упругих элементов (УЭ), представлены на рис.4.
Таблица 1 Координаты упругих элементов
№ упругого элемента на схеме (рис.4) |
|
|
|
№1 |
|
|
|
№2 |
|
|
|
№3 |
|
|
|
№4 |
|
|
|
Обозначим продольную жесткость упругих элементов ![]() , тогда поперечная жесткость упругих элементов будет
, тогда поперечная жесткость упругих элементов будет ![]() , где
, где ![]() - коэффициент отношения поперечной и продольной жесткости. Подставляя значения координат точек крепления, направляющие косинусы и значение жесткости упругих элементов в уравнения коэффициентов жесткости всех УЭ, образующих упругий подвес [2] и учитывая, что мотор-вентилятор симметричен относительно оси Х, т. е.
- коэффициент отношения поперечной и продольной жесткости. Подставляя значения координат точек крепления, направляющие косинусы и значение жесткости упругих элементов в уравнения коэффициентов жесткости всех УЭ, образующих упругий подвес [2] и учитывая, что мотор-вентилятор симметричен относительно оси Х, т. е. ![]() , получим:
, получим:
|
|
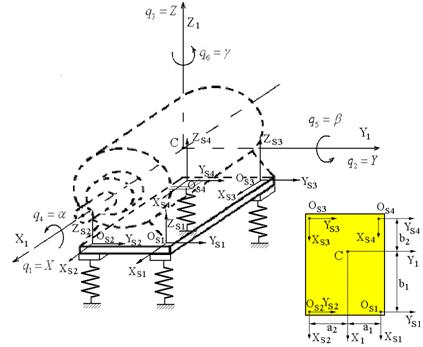
Рис.4 Опорная система подвеса мотор-вентилятора, положение и направления осей упругих элементов.
Система уравнений движения реальной системы упругого подвеса МВ (без учета демпфирования) будет:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
При конструировании системы амортизации должны быть выполнены условия, при которых общая грузоподъемность всех амортизаторов будет равна весу амортизированного объекта защиты (ОЗ), а координаты центра жесткости были близки к координатам центра тяжести ОЗ (центр жесткости это точка приведения всех упругих сил подвеса МВ). В случае совпадения координат центра тяжести 03 и координат центра жесткости системы амортизации монтаж системы подвески будет рациональным [2].
Выражение  определяет элипсоид жесткостей упругого подвеса [2,3]. Так как
определяет элипсоид жесткостей упругого подвеса [2,3]. Так как ![]() , то система осей
, то система осей ![]() параллельна главным осям жесткости подвеса (см. рис. 4). При этом коэффициенты
параллельна главным осям жесткости подвеса (см. рис. 4). При этом коэффициенты ![]() .
.
Условием пересечения осей жесткости ![]() в одной точке
в одной точке ![]() (называемой главным центром жесткости упругого подвеса) будет:
(называемой главным центром жесткости упругого подвеса) будет: ![]()
![]() . В нашем случае
. В нашем случае ![]() ;
; ![]() . Следовательно, условием пересечения осей жесткости подвеса в одной точке будет:
. Следовательно, условием пересечения осей жесткости подвеса в одной точке будет: ![]() ;
; ![]() , т. е.
, т. е. ![]() .
.
При выполнении условия ![]() оси жесткости пересекутся в главном центре жесткости и уравнения движения МВ примут более простой вид:
оси жесткости пересекутся в главном центре жесткости и уравнения движения МВ примут более простой вид:
![]() ;
;
![]() ;
;
![]() ; (4)
; (4)
![]() ;
;
![]() ;
;
![]() .
.
Уравнения (4) позволят в первом приближении по экспериментальным данным определить характеристики жесткости упругого подвеса (коробчатой формы) и приведенной жесткости упругих элементов модели.
Уравнения преобразования измеренных с помощью датчиков значений колебаний МВ в колебания по обобщенным координатам. Запишем формулы определения колебаний в i-ой точке по обобщенным координатам:
 (5)
(5)
где ![]() - значения колебаний в точке;
- значения колебаний в точке;  – значения колебаний по обобщенным координатам;
– значения колебаний по обобщенным координатам; ![]() - координаты крепления датчиков относительно центра масс МВ.
- координаты крепления датчиков относительно центра масс МВ.
Таблица 2 Координаты установки датчиков относительно центра масс МВ
Датчик |
|
|
|
1В | 183 | 0 | 237 |
2В | -307 | 0 | 237 |
1Г | 183 | -230 | 0 |
2Г | -307 | -230 | 0 |
3 | -407 | 0 | 200 |
4 | -62 | 0 | 237 |
Для экспериментального определения по данным вибродатчиков 6 собственных частот колебаний МВ по обобщенным координатам с использованием уравнений (5) и данных табл. 2 получим:
|
|
где; ![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() - значения колебаний (смещения, виброскорости или ускорения) в направлении измерений датчиков;
- значения колебаний (смещения, виброскорости или ускорения) в направлении измерений датчиков; ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() - координаты датчиков 1г; 2г; 1в; 2в, 3, 4 в системе координат
- координаты датчиков 1г; 2г; 1в; 2в, 3, 4 в системе координат  связанной с центром масс МВ.
связанной с центром масс МВ.
На основе проведенных экспериментальных исследований определены частоты свободных колебаний подвески мотор-вентилятора №3:
Таблица 3. Частоты свободных колебаний МВ-3 электровоза ЭП1
Обобщенная координата |
|
|
|
|
|
|
Собственная частота, Гц | 35,2 | 10,9 | 11,7 | 42,2 | 47,6 | 10,2 |
Частоты свободных колебаний позволили определить параметры жесткости и расположения сосредоточенных упругих элементов, моделирующих упругие свойства реальной коробчатой опоры МВ: ![]() =
= ![]() Н/м ;
Н/м ; ![]() ;
; ![]() =1,23 м ;
=1,23 м ; ![]() =0,36 м.
=0,36 м.
Анализ частот свободных колебаний показывает также, что ряд из них (по координатам ![]() и
и ![]() ) находится в опасной близости от оборотной частоты мотор-компрессора (12,5 Гц), что может привести к значительному увеличению резонансных колебаний.
) находится в опасной близости от оборотной частоты мотор-компрессора (12,5 Гц), что может привести к значительному увеличению резонансных колебаний.
Уравнения и исходные данные для моделирования силового и кинематического возмущения. На мотор-вентилятор в условиях эксплуатации воздействуют как силовые, так и кинематические возмущения. Силовое возмущение формируется за счет гироскопических и центробежных сил вращающегося ротора, инерциальных сил передаваемых на МВ от движущегося основания (линейные, ударные и вибрационные ускорения), электромагнитных сил электропривода. Центробежные силы возникают из-за статического, моментного или динамического дисбаланса вращающихся масс ротора. Силовое возмущение является также следствием большинства развивающихся дефектов механической, электрической или аэродинамической природы, что приводит к увеличению вибрации МВ в различных областях спектрального диапазона. Кинематическое возмущение передается на МВ через основание от рядом стоящего вибрирующего оборудования.
а) Уравнения и исходные данные для моделирования кинематического возмущения. Кинематическое возмущение учитывается уравнением (2), в котором  ,
, ![]() - векторы вибросмещения и виброскорости основания. Кинематическое возмущение на МВ от работающего мотор-компрессора экспериментально определено датчиками 5 на схеме измерения вибрации МВ-3 (рис.3) и задается, в основном, по координатам линейного перемещения в виде гармонического ряда:
- векторы вибросмещения и виброскорости основания. Кинематическое возмущение на МВ от работающего мотор-компрессора экспериментально определено датчиками 5 на схеме измерения вибрации МВ-3 (рис.3) и задается, в основном, по координатам линейного перемещения в виде гармонического ряда:
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
![]() =7 мкм;
=7 мкм; ![]() =1,6 мкм;
=1,6 мкм; ![]() = 7 мкм;
= 7 мкм; ![]() =1 мкм;
=1 мкм; ![]() ;
; ![]() Гц.
Гц.
Уравнения для моделирования силового возмущения. б) Действие гироскопического момента вращающегося ротора МВ. При угловых колебаниях вращающегося ротора с кинетическим моментом ![]() вокруг осей
вокруг осей ![]() и
и ![]() с угловыми скоростями
с угловыми скоростями ![]() и
и ![]() на твердое тело передается гироскопический момент (рис.5):
на твердое тело передается гироскопический момент (рис.5):
![]() ;
; ![]() ;
;
где: ![]() - момент инерции ротора вокруг продольной оси;
- момент инерции ротора вокруг продольной оси; ![]() - угловая скорость вращения ротора;
- угловая скорость вращения ротора;  - скорость вращения ротора МВ с учетом скольжения;
- скорость вращения ротора МВ с учетом скольжения; ![]() ,
, ![]() - угловые скорости вращения МВ вокруг осей
- угловые скорости вращения МВ вокруг осей ![]() и
и ![]() соответственно.
соответственно.
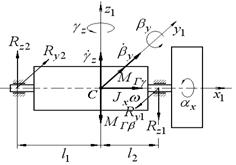
Рис.5. Направление действия проекций гироскопического момента от вращающегося ротора
в) Действие дефектов: статический, моментный или динамический дисбаланс. Действие дисбаланса моделируется двумя силами ![]() и
и ![]() , лежащими в плоскостях, перпендикулярных к оси ротора, приложенными к торцам якоря электродвигателя на расстоянии
, лежащими в плоскостях, перпендикулярных к оси ротора, приложенными к торцам якоря электродвигателя на расстоянии ![]() =0,054 м и
=0,054 м и ![]() =0,23 м (см. рис.6). Эти силы создают главный вектор и главный момент центробежных сил инерции:
=0,23 м (см. рис.6). Эти силы создают главный вектор и главный момент центробежных сил инерции:
![]() ;
; ![]() .
.
С помощью этой схемы расположения сил можно моделировать любой из трех разновидностей дисбалансов:
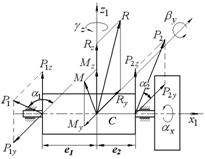
Рис.6. Схема действия сил, создающих дисбаланс ротора
а) статический дисбаланс при  ;
;
( ;
; ![]() ;
; ![]() ).
).
б) моментный дисбаланс при  ;
;
( ).
).
в) динамический дисбаланс – во всех остальных случаях.
Здесь: ![]() ;
; ![]() ;
; ![]() .
.
Структура программы расчета динамических характеристик мотор-вентиляторов “Din_ТТ”
Рис 7. Блок-схема алгоритма программы расчета динамических характеристик МВ “Din_TT”
Программа расчета динамических характеристик мотор-вентиляторов разработана в системе MATLAB 7.01 и позволяет моделировать воздействие на мотор-вентилятор кинематического и силового возмущения с вычислением СКЗ виброускорения в 2-х точках МВ. Полученные в результате моделирования значения виброскорости записываются в формате Excel, для последующей обработки другими программными средствами.
Программа реализована с помощью 8 функций:
- Функция “KOEF” для расчета коэффициентов ![]() и
и ![]() для нахождения матрицы демпфирования упругого подвеса
для нахождения матрицы демпфирования упругого подвеса ![]() .
.
- Функция “INERST” для вычисления матрицы инерционных коэффициентов A.
- Стандартная библиотечная функция MATLAB “ode45” для решения обыкновенного дифференциального уравнения движения твердого тела на упругом подвесе методом Рунге-Кутты 4-го и 5-го порядка.
- Функция “FCT” вычисления правой части дифференциального уравнения движения твердого тела на упругом подвесе с введением возмущающих сил.
- Функция “KGMT” для вычисления матрицы жесткости упругого подвеса С.
- Функция “DEMP” для расчета матрицы демпфирования упругого подвеса B.
- Функция “SKZ” для определения СКЗ виброускорения в 2-х точках МВ и его суммы.
- Стандартная библиотечная функция MATLAB “xlswrite” для записи полученных при моделировании значениях виброскорости в файл в формате “Excel”, для последующей обработки другими программными средствами.
Блок-схема алгоритма программы расчета динамических характеристик мотор-вентиляторов “Din_TT” представлена на рисунке 7.
Результаты моделирования. Моделирование свободных колебаний. Полученные собственные частоты мотор-вентилятора по обобщенным координатам в результате моделирования прставлены в табл. 4.
Таблица 4. Собственные частоты по обобщенным координатам
Обобщенная координата |
|
|
|
|
|
|
Собственная частота, Гц | 35,4 | 11 | 11 | 42,7 | 47,6 | 11,3 |
По данным табл.4, можно сделать вывод, что собственные частоты, по обобщенным координатам полученные при экспериментальных исследованиях и моделировании очень близки, и из этого следует, что используемая математическая модель мотор-вентилятора корректна.
Моделирования вынужденных колебаний при кинематическом возмущении. Результаты моделирования вынужденных колебаний при приведенных выше параметрах кинематического возмущения довольно близко совпадают с экспериментальными данными, как по частотам, так и по амплитудам. На рис.8 приведен спектр выбросмещения по обобщенной координате ![]() при кинематическом возмущении модели (а) и полученный экспериментально при исследовании вынужденных колебаний в случае работы только мотор-компрессора (б). Учитывая, что мотор-компрессор в электровозе работает периодически, резонансные колебаний МВ в направлении координаты
при кинематическом возмущении модели (а) и полученный экспериментально при исследовании вынужденных колебаний в случае работы только мотор-компрессора (б). Учитывая, что мотор-компрессор в электровозе работает периодически, резонансные колебаний МВ в направлении координаты ![]() достигают высоких значений, превышающих амплитуду колебаний при дисбалансе.
достигают высоких значений, превышающих амплитуду колебаний при дисбалансе.
Моделирование вынужденных колебаний при силовом возмущении. При моделировании вынужденных колебаний, рассматривались случаи возникновения в МВ дисбаланса различной природы (статического, моментного, динамического). Результаты моделирования хорошо совпадают с экспериментальными данными и позволяют изучать амплитудные и фазовые характеристики МВ при возникновении наиболее распространенного дефекта МВ – дисбаланса.
а). |
б). |
Рис.8 Спектры выбросмещения по координате при кинематическом возмущении: (а) – модель, (б) – эксперимент |
Большой интерес представляют исследования совместного воздействия кинематического и силового (дисбаланс) возмущения. Дело в том, что вторая гармоника оборотной частоты мотор-компрессора (25 Гц) очень близка к оборотной частоте мотор-вентилятора (24,6 Гц) что может привести к увеличению результирующих колебаний. В случае близости частоты свободных колебаний одного из четырех МВ секции электровоза к этим частотам, могут возникнуть значительные резонансные колебаний по одной из обобщенных координат.
Заключение. В целях уменьшения количества отказов мотор-вентиляторов электровозов нового поколения ЭП-1 и “Ермак” по причине повышенной вибрации, на основе данных проведенных экспериментальных исследований были разработаны математическая модель и программа расчета динамических характеристик подвески мотор-вентиляторов для моделированием воздействия на них силовых и кинематических возмущений возникающих в процессе их эксплуатации. Программное обеспечение позволяет моделировать одиночное или комплексное воздействие различных дефектов на вибрационные характеристики МВ.
Дальнейшее совершенствование математической модели, учет нелинейного характера упругой реакции реальной опоры, действия других дефектов механической и электрической природы, передачи инерционных сил от движущегося основания позволит оптимизировать упруго-диссипативные характеристики подвески МВ, что в конечном итоге приведет к повышению их надежности и снижению виброактивности.
Литература.
1. Численные методы анализа и метод конечных элементов / Пер. с англ. и др.; Под ред. – М.: Стройиздат, 1982.–448 с.
2. Вибрации в технике: Справочник. В 6-ти т./Ред. совет: предс. - М.: Машиностроение, 1978.- т.1. Колебания линейных систем/Под. ред. . 197с.
3. , Ганиев твердых тел.- М. Наука, 1976. – 420 с.
4. Романовский вспомогательных машин электровозов ВЛ-80, ВЛ-65 и рекомендации по ее снижению// Современные технологии. Системный анализ. Моделирование – Иркутск, ИрГУПС.- 2006, №4 (12). С. 51 – 63.
5. Романовский повышенной вибрации вспомогательных машин электровозов// Материалы 2-ой международной научно-технической конференции «Современные методы и приборы контроля качества и диагностики состояния объектов», Белорусско-Российский университет. – Могилев, 19-20 октября 2006 – с.274-277.
6. Сергиенко низкой надежности подшипников двигателей НВА-55// Вестник Всероссийского научно-исследовательского и проектно-конструкторского института электровозостроения (ВЭЛНИИ) – № 2(г. –г. Новочеркасск, стр.
