


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ВИРТУАЛЬНЫЙ УДАЛЕННЫЙ ЛАБОРАТОРНЫЙ ПРАКТИКУМ
ПО РОБОТОТЕХНИКЕ
, ,
Московский государственный технический университет имени , г. Москва
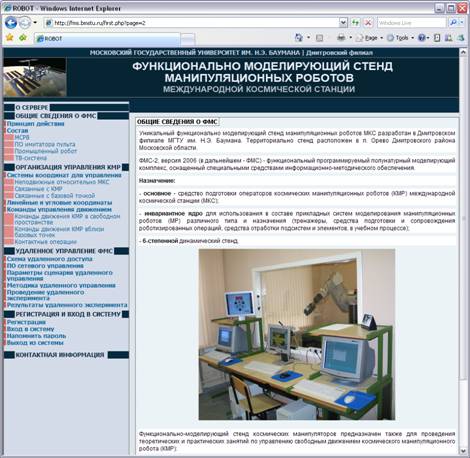
С целью подготовки специалистов на современном уровне в МГТУ им. уделяется большое внимание методам удаленного управления сложными робототехническими системами. Для удаленного использования имеющегося в Дмитровском филиале МГТУ уникального стенда для отработки систем управления роботами Международной космической станции (МКС) в 2006 г. создан сервер «Функционально моделирующий стенд манипуляционных роботов международной космической станции» (ФМС манипуляционных роботов МКС), сайт которого в глобальной сети имеет адрес http://fms. *****. Территориально сервер расположен в Дмитровском филиале МГТУ им. .
ФМС - полунатурный комплекс, позволяющий моделировать виртуально (по компьютерным моделям) и на физическом уровне кинематику, динамику и процессы управления космическими манипуляционными роботами (КМР). ФМС включает в себя несколько объединенных в сеть персональных компьютеров, промышленный робот, телевизионные системы и системы очувствления.
Программное обеспечение ФМС включает: систему моделирования кинематики и динамики манипуляторов КМР в реальном масштабе времени; систему моделирования алгоритмов управления движением манипуляторов КМР; систему подготовки и моделирования программ действий (миссии, автосеквенции) КМР; систему регистрации процессов управления и оценки управляющей деятельности операторов; программное обеспечение (ПО) моделирования работы систем безопасности КМР; имитатор пульта человеко-машинного интерфейса КМР; ПО связи переменные виртуальных моделей и сигналов управления физическими устройствами ФМС (драйверы внешних устройств ФМС).
ПО ФМС имеет развитый интерфейс для ввода в модель параметров манипуляторов (исполнительные механизмы, приводы), выбора алгоритмов и режимов управления КМР (ручные и автоматические, управление движением и действиями, по положению и по скорости), программирования и моделирования миссий, установления связи виртуальных и физических переменных.
Система регистрации позволяет выбрать из всего перечня переменных модели те, что подлежат передаче физическим устройствам ФМС или приему от них, или подлежат запоминанию (регистрации), вычислить некоторые оценки зарегистрированных переменных (осредненные значения самих переменных или функций от них и др.), сохранить их в числовой или графической форме.
Промышленный робот воспроизводит в режиме on-line механические перемещения выбранной точки на любом из звеньев исполнительного механизма манипулятора (телекамера, установленная на схвате или локте КМР, точка крепления инструмента и т. д.).
Оцифрованные сигналы силомоментного датчика обрабатываются драйверами внешних устройств ФМС и с помощью системы регистрации передаются в модель. Наличие развитых интерфейсов, гибкая организация вычислений в ФМС позволяет использовать его в качестве многофункционального модедирующего ядра в составе прикладных моделирующих систем различного типа и назначения.
Один из примеров использования ФМС – в качестве средства начальной подготовки операторов к управлению КМР МКС. В этом случае в модель ФМС вводятся геометрические и массогабаритные параметры звеньев исполнительного механизма, задаются структура и вводятся параметры приводов, выбираются команды управления и программируются миссии, соответствующие одному из КМР МКС. Другой пример - использование в качестве средства для проведения лабораторных практикумов при подготовке специалистов в области робототехники.
Разработанный лабораторный практикум включает три цикла: по основам расчета исполнительных систем и систем управления движением КМР, по теоретическим основам организации управления КМР, а также практикум управления движением и действиями КМР.
В первом цикле из всего состава ПО ФМС задействовано только ПО моделирования КМР, причем таким образом, что доступными для регистрации являются не только переменные модели, но и ее параметры. Это позволяет обучающимся для введенных ими параметров КМР рассчитать элементы матриц Якоби, инерционные коэффициенты, силы и моменты, приведенные к осям приводов внешние силы и моменты, силы и моменты, действующие на звенья и развиваемые приводами КМР при движении по заданному закону, построить нагрузочные диаграммы и частотные характеристики приводов, выполнить решение прямых и обратных задач кинематики и другие расчеты, выполняемые при проектировании манипуляционных роботов. Во втором цикле также используется ПО моделирования КМР, но не только движения, а еще и миссий. Обучающиеся изучают движение КМР при реализации различных режимов ручного и автоматического управления, при использовании различных средств человеко-машинного интерфейса, при управлении в различных координатных системах и др. режимы и алгоритмы, принятые для КМР. Рассматривается работа систем безопасности. ПО ФМС позволяет запрограммировать автосеквенции КМР с использование специализированного языка высокого уровня (типа ARPS промышленного робота ПУМА). Эти автосеквенции затем вводятся и исполняются в ФМС. Третий цикл позволяет обучаемому самому решить одну из практических манипуляционных задач, например, перенос груза из одной точки пространства в другую, задачу ориентации схвата в заданной точке, установку груза. Обучаемый выбирает способ отображения информации (виртуальный дисплей, изображение, транслируемое телекамерами), режим управления (виртуальные и физические ручные контроллеры), командную систему координат (внешняя, внутренняя). Все процессы управления регистрируются и доступны для последующей обработки и оценки.
Выполнение работ во втором и третьем циклах происходит как без использования, так и с использованием промышленного робота (при работе систем силомоментного датчика и технического зрения,). Включение робота осуществляется только после того, как обучающиеся приобрели необходимые навыки управления КМР по виртуальным моделям и только при включенной системе безопасности.
Развитый пользовательский интерфейс и гибкая организация вычислений дают возможность моделировать и имитировать с помощью ФМС функционирование манипуляционных роботов широкого класса в штатных и нештатных режимах, как реальных, так и перспективных. Это позволяет использовать ФМС в широком круге задач подготовки специалистов как в области разработки так и использования робототехнических систем, в том числе, на различных уровнях обучения. Сайт ФМС содержит информацию об его устройстве, принципе действия, составе, каждой составляющей стенда. Приведены фотографии компонентов, схемы их функционирования, основные характеристики, дающие общее представление об используемом оборудовании и его возможностях.
Отдельный раздел сайта посвящен организации управления космическим манипуляционным роботом в ФМС.
Программный комплекс для поддержки режима удаленного управления роботом МКС включает в себя: приложение RemoteRobot. exe, содержащее пользовательский интерфейс удаленного управления и запускаемое на компьютере удаленного пользователя; приложение ReSrv. exe (Remote Server), которое устанавливается либо непосредственно на компьютере удаленного пользователя, либо на любом другом в пределах его рабочей группы, организует прием команд удаленного управления и отправку данных по технологии mailslot, поддерживая работу программы RemoteRobot, а также связывается через сеть Интернет с сервером робота; программу Srv. exe (Server), функционирующую на Web-сервере робота, обеспечивая прием команд и отправку данных через сеть Интернет к удаленному серверу ReSrv, а также транслирует их Lab-серверу робота с помощью mailslot; приложение Model. exe, запущенное на Lab-сервере робота, которое обеспечивает прием команд и отправку данных c помощью mailslot и в непрерывном режиме ведет расчет текущего местоположения всех звеньев робота.
Программный комплекс предусматривает возможность подключения к ФМС не только одного удаленного рабочего места, а целого компьютерного класса. При этом все компьютеры класса находятся в локальной сети в пределах одной рабочей группы и на одном из них запущен Remote Server. В установленной преподавателем очередности обучающиеся получают доступ к управлению удаленным роботом и проводят эксперименты, ход которых отображается на всех удаленных рабочих местах одновременно.
Многокомпонентный программный комплекс рассчитан на подключение Lab-серверу не только модельного, но и реального физического манипуляционного робота и позволяет проводить и реальные физические практикумы через сеть Интернет.
Интерфейс удаленного управления движением робота
Интерфейс, реализованный в программе Remote Robot, поддерживает следующие 6 режимов удаленного управления движением робота. Free Move – перемещение в заданную точку, координаты которой нужно ввести в соответствующие поля интерфейса; Step – перемещение по одной из координат схвата на заданную величину; Jog – перемещение схвата по одной из шести декартовых координат с заданной скоростью; Single Joint Jog – движение с заданной скоростью в одном (выбранном на форме) шарнире; Single Joint Move – перемещение одного из шарниров в заданное угловое положение; тестовый режим – подача ступенчатых управляющих воздействий поочередно в приводы каждой из степеней подвижности.
Визуализация данных осуществляется выводом на экран графиков «Углы шарниров» и «Координаты схвата».
Программа обеспечивает проверку введенных пользователем параметров на осуществимость, а также индикацию режима управления.
