
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.867
ОПРЕДЕЛЕНИЕ РАЦИОНАЛЬНОГО ВАРИАНТА СИСТЕМЫ ПРИВОДОВ
ЛЕНТОЧНОГО КОНВЕЙЕРА ЛСТ-1600
Определен рациональный вариант системы приводов ленточного конвейера ЛСТ-1600. Показано применение метода анализа иерархий при определении рационального варианта системы приводов ленточных конвейеров.
Ключевые слова: система приводов, ленточный конвейер, ЛСТ-1600, рациональный вариант, метод анализа иерархий.
Целью исследования является определение рационального варианта системы приводов (СП) ленточного конвейера (ЛК) ЛСТ-1600 производства (г. Сызрань), обеспечивающего наилучшие показатели качества для заданных требований технического задания.
Схема трассы конвейера представлена на рис. 1.
Рис.1. Схема трассы конвейера ЛСТ-1600 (размеры указаны в метрах)
Задача выбора рационального варианта СП ЛК является многокритериальной. Основную сложность представлял собой выбор метода решения данной задачи. В результате анализа различных методов поиска и принятия решений был выбран метод анализа иерархий [1], как наиболее сбалансированный для решения задач подобного типа.
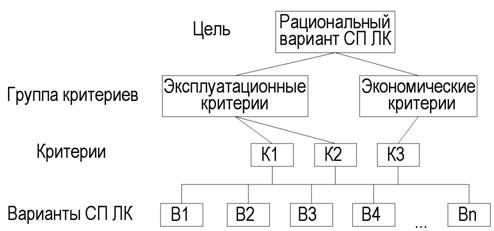 Применительно к объекту исследования была разработана структура иерархии, включающая четыре уровня (рис. 2): варианты СП ЛК, критерии сравнения, группы критериев и цель.
Применительно к объекту исследования была разработана структура иерархии, включающая четыре уровня (рис. 2): варианты СП ЛК, критерии сравнения, группы критериев и цель.
Рис. 2. Структура иерархии при выборе рационального варианта СП ЛК
Поиск рационального варианта СП ЛК проводился с учетом трех критериев:
1) трудоемкость обслуживания СП и тяговой ленты за год (К1);
2) площадь, занимаемая СП (К2);
3) стоимость СП и конвейерной ленты (К3).
Вес каждого варианта СП ЛК определялся зависимостью
![]() , (1)
, (1)
где Qi - степень важности n-го варианта СП ЛК по i-му критерию с учетом важности i-го критерия и группы критериев, к которой он принадлежит; m - количество критериев.
В свою очередь,
![]() , (2)
, (2)
где Qn - степень важности n-го варианта СП ЛК, полученная парным сравнением вариантов СП ЛК по i-му критерию; λкi - степень важности i-го критерия, полученная парным сравнением критериев; λгкт - степень важности m-й группы критериев, полученная парным сравнением групп критериев.
При парном сравнении вариантов СП ЛК по i-му критерию приоритет Пnk варианта n перед вариантом k определялся отношением
 , (3)
, (3)
где Gik - значение i-го критерия для k-го варианта СП ЛК; Gin - значение i-го критерия для n-го варианта СП ЛК.
Зависимость (3) справедлива, так как в предложенном комплексе критериев наилучшими являются минимальные значения критериев для каждого варианта СП ЛК.
Вес n-го варианта СП ЛК Pn при парном сравнении определялся как среднее геометрическое значение приоритетов выбранного варианта по отношению к остальным:
![]() . (4)
. (4)
Степень важности n-го варианта СП ЛК Qn при парном сравнении определялась зависимостью
 . (5)
. (5)
При парном сравнении критериев приоритет i-го критерия перед j-м критерием
 , (6)
, (6)
где Ni - оценка значимости i-го критерия; Nj - оценка значимости j-го критерия.
Вес i-го критерия Pi определялся аналогично Pn зависимостью
![]() . (7)
. (7)
Степень важности i-го критерия
 . (8)
. (8)
Степень важности m-й группы критериев λгкт при парном сравнении групп критериев определялась аналогично λкi с использованием зависимостей (6 – 8).
Возможные варианты СП ЛК были сформированы согласно рекомендациям [2; 3]. Были рассмотрены семь схем СП ЛК (рис. 3), которым соответствовали восемнадцать вариантов структур приводов.

а) б)
 |  |
в) г)
 |
 |
д) е)
 |
ж)
Рис. 3. Схемы СП для конвейера ЛСТ-1600
Структуры приводов подбирались с учетом равномерного распределения нагрузки между всеми приводами системы. Для схем на рис. 3б, д была рассмотрена возможность установки различных по мощности приводных блоков. Для схемы на рис. 3б подобное решение обусловлено созданием возможности перехода на более дешевый типоразмер грузонесущей ленты по сравнению со схемой на рис. 3а. Для схемы на рис. 3д данное решение принято из условия возможной вариации нагрузки с целью снижения энергетических затрат.
При определении структур приводов в соответствии с техническим заданием было принято использовать электродвигатели с фазным ротором. Передаточный механизм представлял собой сочетание планетарного редуктора и зубчатых муфт специального изготовления для всех вариантов структур. Установка тормозов не требовалась, так как величина тормозного момента отрицательная. Все приводы оборудовались храповыми остановами.
Структуры приводов, соответствующие рассмотренным схемам, представлены в табл. 1 (муфты, храповые остановы и рамы приводов условно не показаны).
Таблица 1
Структуры приводов
№ структуры | Схема СП | Структура приводов |
1 | Рис.3а | (ЭД 3150 кВт)→(Р 5П-400Мэ)→(ПБ) |
2 | Рис.3а | (ЭД 1600 кВт)→(Р 5П-315Мэ)→(ПБ)←(Р 5П-315Мэ)←(ЭД 1600 кВт) |
3 | Рис.3б | (ЭД 1600 кВт)→(Р 5П-315Мэ)→(ПБ) |
4 | Рис.3б | (ЭД 800 кВт)→(Р 5П-250Мэ)→(ПБ)←(Р 5П-250Мэ)←(ЭД 800 кВт) |
5 | Рис.3б | Барабанный привод (ЭД 2000 кВт)→(Р 5П-355Мэ)→(ПБ) Промежуточный привод (ЭД 1000 кВт)→(Р 5П-250Мэ)→(ПБ) |
6 | Рис.3б | Барабанный привод (ЭД 1000 кВт)→(Р 5П-250Мэ)→(ПБ)←(Р 5П-250Мэ)←(ЭД 1000 кВт) Промежуточный привод (ЭД 1000 кВт)→(Р 5П-250Мэ)→(ПБ) |
Окончание табл. 1
№ структуры | Схема СП | Структура приводов |
7 | Рис.3в | (ЭД 1000 кВт)→(Р 5П-250Мэ)→(ПБ) |
8 | Рис.3в | (ЭД 500 кВт)→(Р 5П-224Мэ)→(ПБ)←(Р 5П-224Мэ)←(ЭД 500 кВт) |
9 | Рис.3г | (ЭД 800 кВт)→(Р 5П-250Мэ)→(ПБ) |
10 | Рис.3г | (ЭД 400 кВт)→(Р 5П-200Мэ)→(ПБ)←(Р 5П-200Мэ)←(ЭД 400 кВт) |
11 | Рис.3д | (ЭД 1600 кВт)→(Р 5П-315Мэ)→(ПБ) |
12 | Рис.3д | (ЭД 800 кВт)→(Р 5П-250Мэ)→(ПБ)←(Р 5П-250Мэ)←(ЭД 800 кВт) |
13 | Рис.3д | Барабанный привод (ЭД 2000 кВт)→(Р 5П-355Мэ)→(ПБ) Промежуточный привод (ЭД 1000 кВт)→(Р 5П-250Мэ)→(ПБ) |
14 | Рис.3д | Барабанный привод (ЭД 1000 кВт)→(Р 5П-250Мэ)→(ПБ)←(Р 5П-250Мэ)←(ЭД 1000 кВт) Промежуточный привод (ЭД 1000 кВт)→(Р 5П-250Мэ)→(ПБ) |
15 | Рис.3е | (ЭД 1000 кВт)→(Р 5П-250Мэ)→(ПБ) |
16 | Рис.3е | (ЭД 500 кВт)→(Р 5П-224Мэ)→(ПБ)←(Р 5П-224Мэ)←(ЭД 500 кВт) |
17 | Рис.3ж | (ЭД 800 кВт)→(Р 5П-250Мэ)→(ПБ) |
18 | Рис.3ж | (ЭД 400 кВт)→(Р 5П-200Мэ)→(ПБ)←(Р 5П-200Мэ)←(ЭД 400 кВт) |
Примечание. ЭД – электродвигатель; Р – редуктор; ПБ – приводной барабан.
Типоразмеры используемых электродвигателей: 3150 кВт - АКСЗУ2, 2000 кВт - АКНМУХЛ4, 1600 кВт - АКНМУХЛ4, 1000 кВт - АКНМУХЛ4, 800 кВт - АКНМУХЛ4, 500 кВт - АКНМУХЛ4, 400 кВт – АКНМУХЛ4.
Для каждого варианта структуры и соответствующей ей схемы СП (табл. 1) были построены математические модели совместной работы приводов и проведен подробный тяговый расчет [4-6]. Значения критерия К1 для каждого варианта вычислялись по рекомендациям [7], значения критерия К3 – по рекомендациям [8]. Значения критерия К2 для вариантов СП вычислялись согласно габаритным размерам устройств, указанным в соответствующих каталогах.
Значения критериев для вариантов СП представлены в табл. 2.
Таблица 2
Значения критериев для вариантов СП
№ структуры | К1, чел.·ч | К2, м2 | К3, млн р. |
1 | 2476,8 | 21,05 | 50,89 |
2 | 2622,8 | 24,44 | 52,16 |
3 | 5469,38 | 24,44 | 35,42 |
4 | 5973,38 | 34,96 | 36,32 |
5 | 4433,7 | 21,31 | 40,72 |
6 | 4590,3 | 27,27 | 41,47 |
7 | 4841,1 | 27,27 | 34,94 |
8 | 5628,9 | 46,53 | 35,87 |
9 | 5177,1 | 34,96 | 37,03 |
10 | 6015,5 | 37,36 | 38,51 |
11 | 2706,4 | 24,44 | 46,42 |
12 | 3210,4 | 34,96 | 47,32 |
13 | 2579,2 | 21,31 | 45,89 |
14 | 2735,8 | 27,27 | 46,65 |
15 | 4673,9 | 27,27 | 41,67 |
16 | 5461,7 | 46,53 | 42,6 |
Окончание табл. 2
№ структуры | К1, чел.·ч | К2, м2 | К3, млн р. |
17 | 5009,9 | 34,96 | 36,72 |
18 | 5848,29 | 37,36 | 38,2 |
Оценки значимости критериев в предложенном комплексе представлены в табл. 3.
Таблица 3
Оценки значимости критериев
Обозначение | Критерий | Оценка значимости |
К1 | Трудоемкость обслуживания СП и тяговой ленты за год | 9 |
К2 | Площадь, занимаемая СП | 3 |
К3 | Стоимость СП и конвейерной ленты | 9 |
Оценка значимости группы эксплуатационных критериев – 7, группы экономических критериев – 9.
Степени важности критериев и групп критериев, определенные согласно зависимостям (6 – 8), представлены в табл. 4.
Таблица 4
Степени важности критериев и групп критериев
Группа критериев | Степень важности группы критериев | Критерий | Степень важности критерия |
Эксплуатационные | 0,4375 | К1 | 0,428 |
К2 | 0,144 | ||
Экономические | 0,5625 | К3 | 0,428 |
Итоговые значения веса вариантов СП ЛК, вычисленные с использованием зависимостей (1 – 8): 1 – 0,021; 2 – 0,019; 3 – 0,022; 4 – 0,02; 5 – 0,021; 6 – 0,019; 7 – 0,023; 8 – 0,019; 9 – 0,02; 10 – 0,019; 11 – 0,021; 12 – 0,019; 13 – 0,022; 14 – 0,02; 15 – 0,019; 16 – 0,017; 17 – 0,02; 18 – 0,019.
Таким образом, рациональным вариантом СП в рассмотренной проектной ситуации является структура приводов №7 (табл. 1) для схемы СП на рис.3в.
По результатам исследования можно сделать вывод, что в ряде случаев усложнение конструкции СП (установка промежуточных ленточных приводов) может привести в целом к улучшению показателей ленточных конвейеров по наиболее значимым для предприятия-изготовителя критериям.
СПИСОК ЛИТЕРАТУРЫ
1. Саати, решений. Метод анализа иерархий: [пер. с англ.] / . – М.: Радио и связь, 19с.
2. Реутов, проектирования системы приводов ленточного конвейера / , // Материалы, оборудование и ресурсосберегающие технологии: материалы Междунар. науч.-техн. конф. (г. Могилев, 21-22 апр. 2011г.) / под ред. . - Могилев: Белорус.-Рос. ун-т, 2011.– Ч. 2. – С. 25-26.
3. Гончаров, принципов построения схем систем приводов ленточных конвейеров / //Материалы научной конференции Совета МНТО / под ред. . – Брянск: БГТУ, 2011. – 81 с.
4. Реутов, стационарных режимов работы приводов ленточных конвейеров / // Тяжелое машиностроение. – 2007. - № 2. - С.34-36.
5. Реутов, совместной работы концевого и промежуточного приводов ленточного конвейера / , // Вестн. БГТУ№2. - С. 42-45.
6. Спиваковский, машины / , . – М.: Машиностроение, 19с.
7. Единая система планово-предупредительного ремонта и рациональной эксплуатации технологического оборудования машиностроительных предприятий/ под ред. – 6-е изд., перераб. и доп. - М.: Машиностроение, 19с.
8. Кац, -экономический анализ и оптимизация конструкций машин / , . – М.: Машиностроение, 1981. – 214 с.
Материал поступил в редколлегию 28.10.11.
