
УДК 631.3
, ,
БУКСОВАЯ НАПРАВЛЯЮЩАЯ С ЭЛЕМЕНТАМИ КАЧЕНИЯ
Исследована возможность использования опор возвратно-поступательного движения с элементами качения в буксовых направляющих подвижного состава железных дорог.
Ключевые слова: опора, возвратно-поступательные движения, буксовая направляющая, элементы качения.
Опоры с высшими кинематическими парами повышенной износостойкости при определенных значениях геометрических параметров (высота стойки L и радиусы вогнутых и выпуклых поверхностей R и r) могут быть использованы как направляющие с односторонним или двухсторонним ограничением [1].
Основы теоретических исследований. Рассмотрим теоретические положения [1] к разработке буксовых направляющих для локомотивов и вагонов с элементами качения, принципиально отличных по конструкции и принципу работы от используемых до сих пор. Из известных конструкций буксовых направляющих широкое распространение получили челюстные, цилиндрические и подковные с резинометаллическими шарнирами. Каждая конструкция имеет положительные качества и недостатки. К недостаткам челюстных направляющих относится абразивное изнашивание, цилиндрических направляющих – сложность конструкции, резинометаллических шарниров – существенное увеличение жесткости рессорного подвешивания и некоторые менее существенные недостатки.
Рис. 1. Расчетная схема буксового узла для грузового вагона
На рис. 1 изображен буксовый узел, в котором букса смещена вверх на величину ![]() от номинального положения. Букса 1 установлена на ось колесной пары. Вертикальные силы передаются от рамы тележки 2 на буксу пружинами 3, расположенными над буксой. В горизонтальном направлении вдоль боковины букса связана с рамой тележки двумя поводками 4. Каждый поводок состоит из штанги 5 с выпуклыми цилиндрическими поверхностями радиуса r на торцах, опирающимися на вогнутые поверхности радиуса R, сухаря 6, установленного на буксе, и упора 7, укрепленного на кронштейне рамы тележки.
от номинального положения. Букса 1 установлена на ось колесной пары. Вертикальные силы передаются от рамы тележки 2 на буксу пружинами 3, расположенными над буксой. В горизонтальном направлении вдоль боковины букса связана с рамой тележки двумя поводками 4. Каждый поводок состоит из штанги 5 с выпуклыми цилиндрическими поверхностями радиуса r на торцах, опирающимися на вогнутые поверхности радиуса R, сухаря 6, установленного на буксе, и упора 7, укрепленного на кронштейне рамы тележки.
Длина штанги по оси симметрии равна L. Для удержания штанги от падения и исключения проскальзывания поверхностей радиусов R и r (если угол сцепления превысит угол трения) предусмотрены цилиндрические поверхности на штангах радиуса ρ с центрами в точках пересечения поверхностей радиуса r с осью симметрии [2]. Эти поверхности поворачиваются внутри пазов деталей 6 и 7. Рамные силы передаются через контактирование боковых поверхностей штанги с сухарем на буксе и упором на раме тележки.
Работает буксовая направляющая следующим образом. При вертикальных колебаниях рамы тележки выпуклые поверхности штанги 5 перекатываются по вогнутым поверхностям сухаря 6 и упора 7.
Боковые колебания рамы тележки относительно продольной горизонтальной оси (боковая качка) обеспечиваются возможностью поворота сухаря 6 относительно буксы (показано на правом поводке на рис. 1).
Рассмотрим левый поводок. При этом примем, что рама тележки неподвижна, а букса совершает вертикальные колебания. Для описания траекторий точек ![]() ,
,![]() и
и ![]() при колебаниях верхней плиты опоры одинаковыми формулами [1] применена нетрадиционная система координат: горизонтальная ось обозначена буквой у, вертикальная – х (рис. 1).
при колебаниях верхней плиты опоры одинаковыми формулами [1] применена нетрадиционная система координат: горизонтальная ось обозначена буквой у, вертикальная – х (рис. 1).
Запишем известные формулы [1].
![]() ; (1)
; (1)
![]() ; (2)
; (2)
![]() ; (3)
; (3)
![]() ; (4)
; (4)
![]() . (5)
. (5)
Упростим формулу (4):
![]() .
.
Следует обратить внимание на то, что длина штанги L равна двум приведенным эквивалентным радиусам ![]() , от величины которых зависит контактная прочность соединения. Очевидно, что начинать проектирование необходимо с расчета соединения на контактную прочность, по результатам которого вычисляется длина штанги L. По этому параметру затем определяются остальные размеры. Следовательно, длина штаги L является важным геометрическим параметром, особенно при проектировании транспортных машин.
, от величины которых зависит контактная прочность соединения. Очевидно, что начинать проектирование необходимо с расчета соединения на контактную прочность, по результатам которого вычисляется длина штанги L. По этому параметру затем определяются остальные размеры. Следовательно, длина штаги L является важным геометрическим параметром, особенно при проектировании транспортных машин.
Далее рассматриваем только буксовую направляющую. Обозначим отношение ![]() буквой п. Тогда радиус выпуклой поверхности можно выразить через длину штанги L следующим образом:
буквой п. Тогда радиус выпуклой поверхности можно выразить через длину штанги L следующим образом:
![]() .
.
Запишем формулы (1), (2), (3) и (5) в следующем виде:
![]() ; (6)
; (6)
![]() ; (7)
; (7)
![]() ; (8)
; (8)
![]() . (9)
. (9)
Рассмотрим частные случаи.
Случай 1. ![]() ,
, ![]() .
.
Формулы (6-9) упростятся и запишутся в следующем виде:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Так как ![]() (постоянная величина), то точка S будет совершать колебания по вертикальной прямой. Аналогично такая же точка на втором поводке будет совершать колебания по вертикальной прямой. Следовательно, центр буксы будет совершать вертикальные колебания. Поскольку
(постоянная величина), то точка S будет совершать колебания по вертикальной прямой. Аналогично такая же точка на втором поводке будет совершать колебания по вертикальной прямой. Следовательно, центр буксы будет совершать вертикальные колебания. Поскольку ![]() при
при ![]() , то линия, соединяющая точки контакта
, то линия, соединяющая точки контакта ![]() и
и ![]() , будет всегда горизонтальной. Силы, передающиеся от буксы на раму тележки по линии
, будет всегда горизонтальной. Силы, передающиеся от буксы на раму тележки по линии ![]()
![]() , не будут оказывать влияния на вертикальные колебания.
, не будут оказывать влияния на вертикальные колебания.
Случай 2. ![]() ,
, ![]() .
.
Формулы (6-9) преобразуются и запишутся следующим образом:
![]() ;
;
![]() ; (10)
; (10)
![]() ;
;
![]() .
.
Случай 3. ![]() ,
, ![]() .
.
Формулы (6-9) запишем в измененном виде:
![]() ;
;
![]() ; (11)
; (11)
![]() ;
;
![]() .
.
Как видно из формул (10) и (11), траектории движения точек S во втором и третьем частных случаях отклоняются от вертикальной прямой. Величину отклонения ![]() можно определить по выражению
можно определить по выражению
![]() .
.
Для трех рассмотренных частных случаев рассчитаны: вертикальная координата перемещения буксы относительно рамы тележки ![]() , величина зазоров
, величина зазоров ![]() , тангенс угла
, тангенс угла ![]() . Для всех случаев L = 100 мм,
. Для всех случаев L = 100 мм,  . Для частного случая 1 в общем виде установлено, что координата
. Для частного случая 1 в общем виде установлено, что координата ![]() и
и ![]() равны нулю. Следовательно,
равны нулю. Следовательно, ![]() . Кроме того, предварительными расчетами доказано, что в частном случае 2
. Кроме того, предварительными расчетами доказано, что в частном случае 2 ![]() возрастает от нуля до
возрастает от нуля до ![]() . На работу направляющей такие значения не влияют, поэтому ими можно пренебречь. По результатам расчетов составлена таблица, в которую значения
. На работу направляющей такие значения не влияют, поэтому ими можно пренебречь. По результатам расчетов составлена таблица, в которую значения ![]() для первого случая и
для первого случая и ![]() для всех трех случаев не введены.
для всех трех случаев не введены.
Таблица
Координата xS (мм), отклонение точки S от вертикали Dy (мм) и ![]()
в зависимости от угла ![]()
|
|
|
| |||||
|
|
|
|
|
|
|
| |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
5 | 8,7 | 0,09 | 9 | 0 | 0,04 | 12 | 0 | 0,18 |
10 | 17 | 0,18 | 17 | 0 | 0,09 | 17 | 0,01 | 0,36 |
15 | 26 | 0,27 | 26 | 0 | 0,13 | 26 | 0,03 | 0,58 |
20 | 34 | 0,36 | 35 | 0,015 | 0,17 | 34 | 0,12 | 0,82 |
25 | 42 | 0,47 | 43 | 0,038 | 0,22 | 40 | 0,29 | 1,16 |
30 | 50 | 0,58 | 51 | 0,08 | 0,26 | 48 | 0,59 | 1,67 |
Анализ формул в общем виде и частных случаях, а также результатов расчетов (таблица) позволяет сделать следующие теоретические выводы:
1. Координаты точки S (xS и yS) зависят от двух параметров: длины штанги ![]() и угла ее поворота
и угла ее поворота ![]() . На величину углов
. На величину углов ![]() и
и ![]() длина штанги не влияет. Уменьшить угол
длина штанги не влияет. Уменьшить угол ![]() можно увеличением длины штанги
можно увеличением длины штанги ![]() .
.
2. Перемещения буксы ![]() при одинаковых
при одинаковых ![]() и
и ![]() для всех трех случаев отличаются несущественно.
для всех трех случаев отличаются несущественно.
3. Отклонения координаты ![]() от вертикали (
от вертикали (![]() ) и угла
) и угла ![]() допустимы для практического применения.
допустимы для практического применения.
4. С учетом изменения угла сцепления ![]() можно рекомендовать для практического использования первый и второй частные случаи, а также промежуточные значения параметров. Третий частный случай для буксовых направляющих недопустим.
можно рекомендовать для практического использования первый и второй частные случаи, а также промежуточные значения параметров. Третий частный случай для буксовых направляющих недопустим.
Расчет и проектирование буксового узла. Результаты теоретических исследований использованы для расчета основных параметров буксовых направляющих двухосной тележки скоростного грузового вагона с двухступенчатым рессорным подвешиванием. В первой ступени подвешивания предусмотрена повышенная жесткость, чтобы при всех скоростях движения (вплоть до максимальной) частота колебаний тележки не достигала резонансной. Первая ступень подвешивания расположена над буксами.
В предлагаемой буксовой направляющей принято: длина штанги  мм, радиус вогнутых поверхностей
мм, радиус вогнутых поверхностей ![]() мм, выпуклых –
мм, выпуклых – ![]() мм. Так как
мм. Так как ![]() , точка S перемещается по вертикали без отклонения, перекатывание в парах качения происходит без скольжения.
, точка S перемещается по вертикали без отклонения, перекатывание в парах качения происходит без скольжения.
В первой ступени подвешивания средняя амплитуда колебаний находится в пределах 15…20 мм. Положение рамы тележки по вертикали относительно буксы при статическом равновесии изменяется при переходе с груженого режима в порожний и обратно. С учетом этого суммарную амплитуду принимаем равной 35мм, среднюю – 25 мм.
Рис. 2. График зависимости tg g от перемещения буксы xS |
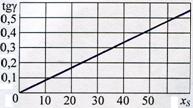
На рис. 2 построен график зависимости изменения ![]() от перемещения буксы
от перемещения буксы ![]() для предлагаемой направляющей. Согласно этому графику, при амплитуде 25 мм
для предлагаемой направляющей. Согласно этому графику, при амплитуде 25 мм ![]() (меньше коэффициента трения). Случайные скачки амплитуды более 25 мм и кратковременные увеличения
(меньше коэффициента трения). Случайные скачки амплитуды более 25 мм и кратковременные увеличения ![]() , превышающие коэффициент трения в зоне качения, будут удерживаться замыкателями касательных сил.
, превышающие коэффициент трения в зоне качения, будут удерживаться замыкателями касательных сил.
Наряду с описанным вариантом буксовой направляющей разработана направляющая для локомотивов и пассажирских вагонов с увеличенным статическим прогибом рессорного подвешивания в первой ступени и буксой с нижним расположением крыльев под пружины. Пружины в этом случае проходят через отверстия в штангах поводков, в связи с чем длина штанги L увеличена до 300 мм. Увеличена также ширина штанги.
Так как амплитуда колебаний существенно не изменилась, увеличение длины штанги привело к уменьшению угла ее поворота ![]() , а следовательно, и угла
, а следовательно, и угла ![]() .
.
Таким образом, проведенные теоретические исследования и предварительные конструкторские проработки доказали возможность создания буксовых направляющих с элементами качения повышенной износостойкости.
Список литературы
1. Аксютенков, возвратно-поступательного движения с высшими кинематическими парами / , , //Вестн. БГТУ. – 2009. - №2. – С. 49-52.
2. Аксютенков, диапазона характеристик в опорах с высшими кинематическими парами / , , //Вестн. БГТУ. – 2010. - №1. – С. 31-35.
Материал поступил в редколлегию 11.10.10.
