Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство образования Российской Федерации
Самарский Государственный Аэрокосмический Университет имени академика
Лабораторная работа №1
Расчет параметров регулятора для
линейной динамической системы
Вариант 94
Выполнил:
Группа: 645
Проверил:
Самара 2007
Постановка задачи
Линейная динамическая система, описывающая поведение объекта управления, записывается в виде
![]() , (1)
, (1)
где ![]() - вектор переменных состояния системы,
- вектор переменных состояния системы, ![]() - скалярное управление, матрица
- скалярное управление, матрица ![]() и вектор
и вектор ![]() характеризуют объект управления и считаются заданными. В данной лабораторной работе размерность вектора состояния
характеризуют объект управления и считаются заданными. В данной лабораторной работе размерность вектора состояния ![]() .
.
При рассмотрении задачи управления линейной динамической системой обычно в качестве критерия оптимальности применяется функционал с квадратичной подинтегральной функцией
 . (2)
. (2)
Здесь ![]() ,
, ![]() - симметричная квадратичная форма вектора
- симметричная квадратичная форма вектора ![]()
![]() , (3)
, (3)
где ![]() - транспонированный вектор
- транспонированный вектор ![]() ,
, ![]() - квадратная симметричная матрица.
- квадратная симметричная матрица.
Предполагается, что функция ![]() есть положительно определенная квадратичная форма
есть положительно определенная квадратичная форма  , причем
, причем  только при
только при ![]() . Проводя перемножения в соотношении (3) в скалярном виде можно записать
. Проводя перемножения в соотношении (3) в скалярном виде можно записать
 , (4)
, (4)
Для системы второго порядка ![]() функция
функция ![]() принимает вид
принимает вид
![]() . (5)
. (5)
Задача оптимального управления линейной динамической системой формулируется так: среди допустимых управлений ![]() системой (1) найти такое управление, которая доставляет минимум функционалу (2) и переводит систему из начального положения
системой (1) найти такое управление, которая доставляет минимум функционалу (2) и переводит систему из начального положения ![]() в начало координат
в начало координат ![]() , где
, где ![]() - время перехода.
- время перехода.
Для нашего случая:
![]() , где
, где ![]()
![]()
![]()
![]()
Расчет оптимального регулятора линейной динамической системы (ЛДС)
1 Определение управляемости ЛДС
Рассмотрим динамическую систему:
 ,
,
где  ,
,  ,
,  , u=u(y1, y2).
, u=u(y1, y2).
Найдем матрицу преобразования V. Для этого найдем собственные числа и вектора матрицы В.
 ,
, 
где V(1), V(2) – собственные вектора матрицы В.
В главных координатах: y=Vy*, тогда система примет вид: ![]() ,
,
Где  ,
,
(λ1,2 – собственные значения матрицы В)
 .
.
Критерий Гильберта: Динамическая система (1) является управляемой, если она может быть переведена из любого начального состояния ![]() в любое другое желаемое состояние
в любое другое желаемое состояние ![]() за некоторый промежуток времени
за некоторый промежуток времени ![]() путем приложения допустимого управления
путем приложения допустимого управления ![]() .
.
Для определения управляемости линейная система (1), должна быть приведена к главным координатам
 ,
,  , (6)
, (6)
где ![]() собственные значения матрицы
собственные значения матрицы ![]() ,
,  - преобразованный вектор
- преобразованный вектор ![]() .
.
Система (1) приводится к виду (6), если среди собственных значений матрицы ![]() нет кратных
нет кратных  .
.
Тогда, согласно критерию Гильберта : система (1) управляема, если ни один из компонентов вектора ![]() не является нулевым, где
не является нулевым, где ![]() - матрица собственных векторов для матрицы
- матрица собственных векторов для матрицы ![]() .
.
В нашем случае получаем:
![]() , матрица не содержит нулевых элементов, т. е. система управляема по Гильберту.
, матрица не содержит нулевых элементов, т. е. система управляема по Гильберту.
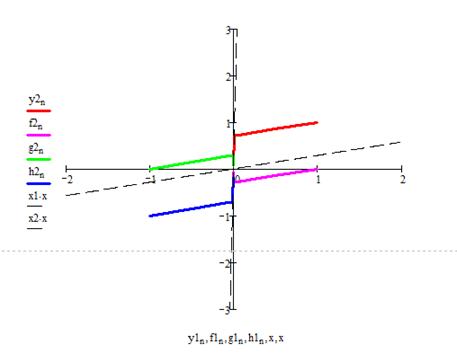
2 Исследование ЛДС без управления (u=0). Фазовый портрет системы
Пусть u=0, тогда система примет вид:
 , собственные значения матрицы В равны λ1= 0.03, λ2= 0.0002. Т. е. Получаем особую точку типа «неустойчивый узел».
, собственные значения матрицы В равны λ1= 0.03, λ2= 0.0002. Т. е. Получаем особую точку типа «неустойчивый узел».
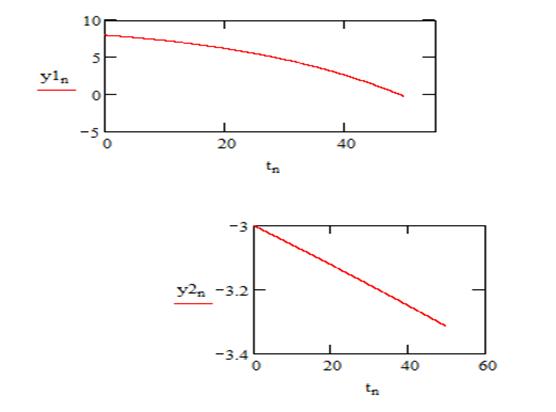
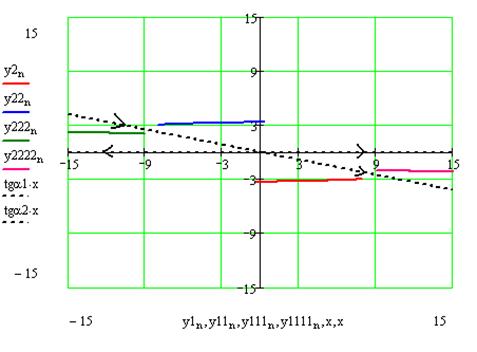
Рис. 1 - Фазовый портрет системы без управления.
3 Решение задачи оптимального управления системы u.
Принцип оптимальности Беллмана для ЛДС.
– линейная динамическая система
y – отклонение от начала координат или от заданного направления.
 – квадратичный критерий оптимальности,
– квадратичный критерий оптимальности,
где c>0,
а – положительно определенная матрица;
![]()
 ,
, ![]() .
.
Применим принцип Беллмана для нахождения оптимального управления:
 ,
,
где u – управление, скалярная величина.
 ,
,
 – необходимое условие экстремума,
– необходимое условие экстремума,
 ;
;
Составим систему относительно А11, А22 и А12 и решим ее в общем виде:
![]()
![]()
![]()
![]()
![]()

В результате решения получаем следующее решение:
Коэффициенты оптимального регулятора рассчитываются по формуле:
![]()
Проверим выполнение условий Сильвестра:
В нашем случае мы получили:
![]()
Таким образом оптимальное управление
![]()
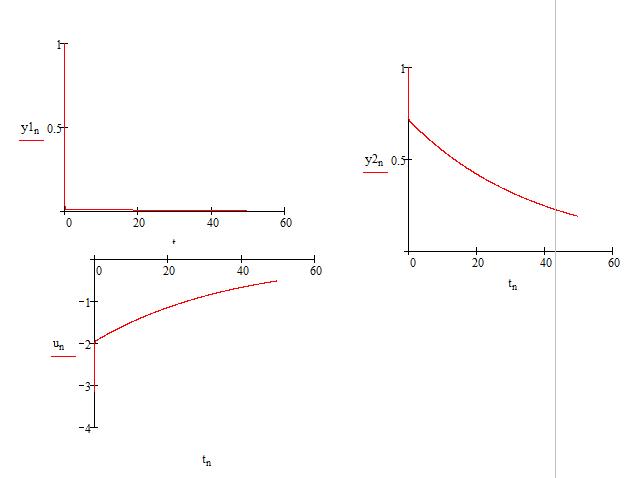
4 Исследование динамической системы с управлением.
Учитывая управление получаем новую матрицу В.
![]()
Собственные значения новой матрицы
 Получили особую точку типа «устойчивый узел»
Получили особую точку типа «устойчивый узел»
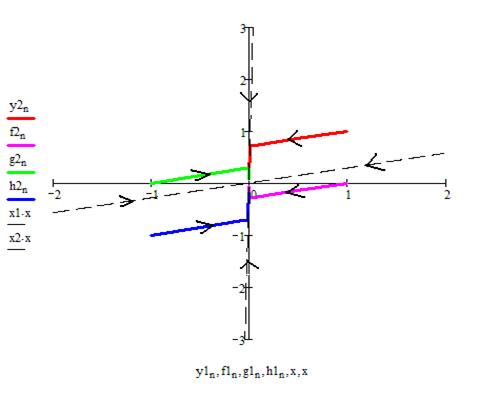
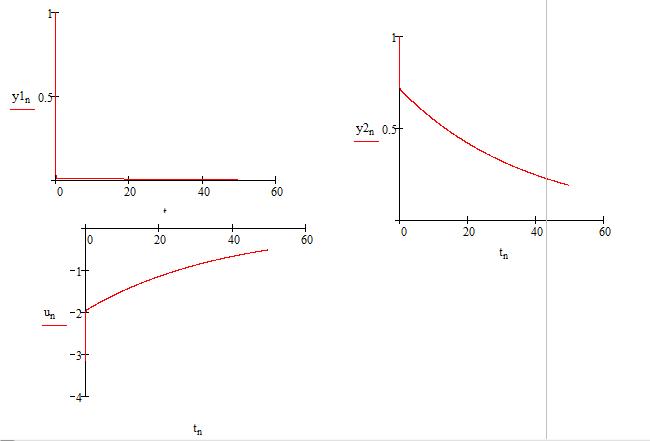
Рис. 2 - Фазовый портрет системы с управлением.
5 Вывод.
Проверив управляемость линейной динамической системы, убедились в том, что она управляема по критериям Гильберта (следует заметить, что система хорошо управляема) и Калмана. Построив фазовый портрет системы без управления, получили особую точку типа «седло». Решив задачу оптимального управления системы, построили фазовый портрет системы с управлением и получили особую точку типа «устойчивый узел».
6.Листинг программы Mathcad
1.Начальные условия |
|
|
|
|
|
|
2.Определение управляемости системы |
a)Критерий Гильберта |
|
|
|
|
|
|
|

|
|
|
|
|
Определим коэффициент управляемости |
|
|
|
|
Проверка |
|
|
????? |
b)Критерий Кальмана |
|
|
|
система управляема по критерию Кальмана |
3. Построение фазового портрета |
Задание правых частей дифференциальных уравнений |
|
Зададим начальное и конечное время |
|
|
Зададим количество точек на отрезке [t0,tk] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|

|
|
|
|
|
|
4. Определение управления |
Найдем коэффициенты А11, А22, А12: |
|
|
|
|
|
|
|
|
|
|
|
Проверим выполнение условия Сильвестра: |
|
|
|
|
|
Коэффициенты оптимального регулятора: |
|
|
|
Полученное уравнение: |
|
Измененная матрица динамической системы: |
|
|
|
5. Исследование полученной замкнутой системы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
Тангенсы углов наклона: |


|

|

|
|
|
|
|
|
|