Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
А. И. ХАЧАТРЯН
ДИНАМИКА парусников
со свободным вектором тяги
ТЕОРИЯ
Москва
2008
УДК: 531, 532, 533,
621.51.54,
629.5, 797
ББК: 0 42-011.2, 0 42-016,
0 422.7, 0 425.62
ДИНАМИКА парусников со свободным вектором тяги
ТЕОРИЯ
Книга дважды издавалась в Москве в 2008г.
Литературный редактор, корректор
ХАЧАТРЯН АРМЕН ИСРАЕЛОВИЧ
ДИНАМИКА парусников
со свободным вектором тяги
ТЕОРИЯ
В книге предлагаются конструкции, принципы работы и методики расчёта парусных судов, способных двигаться за счёт энергии ветра в любом направлении, в том числе строго против ветра. Этого удалось достигнуть, заменив существующую статическую схему работы элементов движителей парусных судов на динамическую. Доказывается, что судно с подвижными относительно корпуса парусами и килями имеет лучшие скоростные показатели, чем традиционное, с неподвижной схемой работы этих элементов.
СОДЕРЖАНИЕ
Глава 1. Суть проблемы и пути её решения………………………………….5
Глава 2. Принципы обозначения параметров и формирования углов...…9
Глава 3. Исходные и искомые динамические параметры,
некоторые допущения…………………….……..…………………….…….….11
Глава 4. Динамика судна с традиционной расчётной схемой……………28
§ 4.1. Методика расчёта……...…………………….….…………….….…28
§ 4.2. Геометрия векторов………..………………………..…..……….…32
Глава 5. Движитель с воздушным винтом………………………….………..38
§ 5.1. Методика расчёта……………………………..……......……..……38
§ 5.2. Геометрия векторов…………………..……………………...…..…46
Глава 6. Подвижные тандемы………………………………………….………52
§ 6.1. Замкнутая траектория……………………….……………..………52
§ 6.2. Возвратно-поступательное движение………………...…………54
§ 6.3. Методика расчёта………………………………………...…………55
§ 6.4. Геометрия векторов…………………………….………......………74
Глава 7. Маятники………………………………………………………..………85
§ 7.1. Вертикальный маятник…………….………………….….…...……85
§ 7.2. Горизонтальный маятник………………….………….……………94
§ 7.3. Принцип одновременности событий...…….…………..…….…111
§ 7.4. Геометрия векторов………………………….…………....………135
Глава 8. Принцип буксиров……………………………………….…..………146
§ 8.1. Два буксира…….…………….……………………………..………146
§ 8.2. Один буксир………………………………………………...………150
Глава 9. Принцип байдарки………………………………………….…….....169
Глава 10. Вертикальный винт…………………………………..…….………202
Глава 11. Горизонтальный винт…………………….…………….….………220
§ 11.1. Обычный винт..……………………………………….…..………220
§ 11.2. Переменный объём подвижных килей……..……….….…….245
§ 11.3. Подъёмная сила………………………………………….………280
§ 11.4. Некоторые особенности расчёта и конструирования………284
Глава 12. Паруса и кили. Настройка углов атаки…...………………….…307
§ 12.1. Горизонтальный винт……………………………………….……313
§ 12.2. Принцип байдарки…………………………….…….……………322
§ 12.3. Подвижные координаты...………………….………….………..358
§ 12.4. Выводы……………………………………….………….…………358
Глава 13. Обобщение результатов...…………………………………..……366
§ 13.1. Неучтённые факторы.…………………….……………………..366
§ 13.2. Сравнительный анализ…..……………………….………..……367
Глава 14. Заключение…………………………………………………….……375
Приложение. Системы координат, конструктивные элементы и
основные буквенные обозначения параметров………………….…….….378
Литература………......…………………………………………………….….…386
Глава 1
Суть проблемы и пути её решения
Использование энергии движущихся потоков окружающей нас природы всегда привлекало человечество. С древних времён человек успешно приспосабливал для своих нужд энергию ветра и рек: для работы мельниц, транспортёров, сплава грузов, мореплавания и т. д. Позже стали появляться станции, использующие силу морских и океанических волн, а затем и системы, генерирующие солнечную энергию. По расчётам специалистов, запасов земных горючих – невозобновляемых источников энергии – нашей цивилизации хватит всего лишь на ближайшие 40–50 лет. Думается, что главенство двигателей с топливом на углеводородах может завершиться ещё раньше. Поэтому поиски способов более эффективного использования энергии естественных природных потоков являются одним из актуальных направлений деятельности человека.
Когда-то основные перемещения человека по воде выполнялись главным образом за счёт энергии ветра. Дальние страны без силы ветра были недостижимы. Парусные суда с древних времён хорошо зарекомендовали себя как средство передвижения по воде. И сегодня не пропал интерес человека к этому виду транспорта. В бизнесе традиционно парусные суда были и остаются надёжным направлением вложения средств.
Эволюция парусных судов длится уже несколько тысячелетий. За это время существенно усовершенствовались материалы, используемые при изготовлении судов, а также их формы и дизайн. Они развиваются параллельно с достижениями в области аэро-, гидродинамики и космических технологий. При этом механика движения парусников практически не изменилась. Её можно рассматривать как редкое исключение из правила, описанного в басне «Лебедь, рак и щука». Здесь все герои – лебедь (ветер), рак (парус) и щука (киль) – тащат воз (корпус лодки) в разные стороны, а в результате он идёт как надо, вперёд.
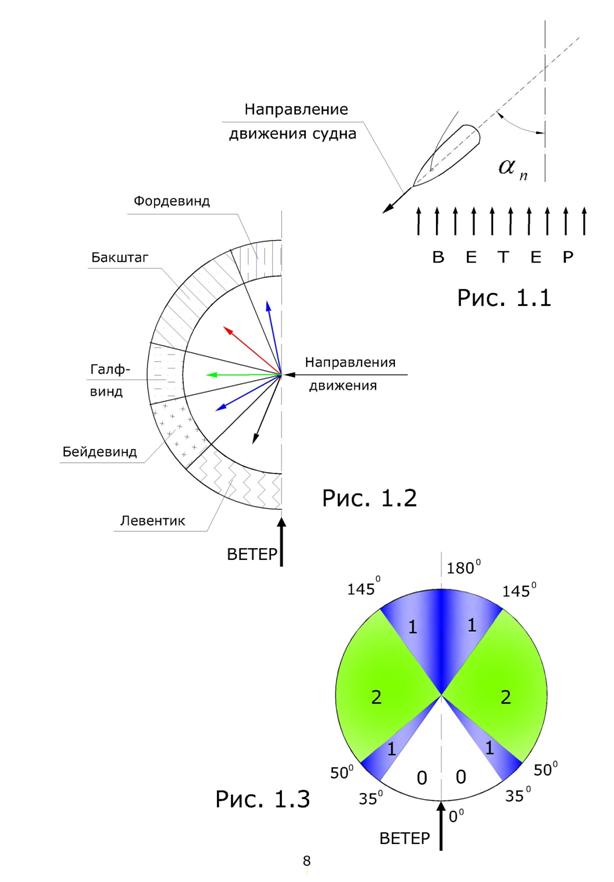
Конструкции парусников обеспечивают движение судна по направлению ветра, а также под углом к нему ![]() (рис. 1.1). За прошедшие тысячелетия удавалось постепенно уменьшать величину этого угла, то есть плыть круче против ветра. В настоящее время считается вполне достижимым курс парусной лодки при угле
(рис. 1.1). За прошедшие тысячелетия удавалось постепенно уменьшать величину этого угла, то есть плыть круче против ветра. В настоящее время считается вполне достижимым курс парусной лодки при угле ![]() , равном 40°.
, равном 40°.
Векторную сумму ветров, от собственного движения и истинного, принято называть вымпельным ветром. Находясь на палубе судна, мы ощущаем вымпельный ветер, а на берегу – истинный.
В зависимости от направления движения судна по отношению к истинному ветру различают пять основных курсов: левентик, бейдевинд, галфвинд, бакштаг и фордевинд (рис. 1.2).
Известные конструкции парусных судов имеют определённые ограничения в плане направления движения [1,2,3,4]. Это изображено на рисунке 1.3, где предполагаемые направления движения судна в пределах круга разделены цветной заливкой на сектора 3-х категорий. К нулевой категории отнесён сектор в интервале от 0° до 35°, в пределах которого плыть без лавирования невозможно.
Движение под углом 35°–50° (категория 1) против ветра считается возможным, но малоэффективным. Чем быстрее движется судно, тем острее к нему вымпельный ветер, что отрицательно сказывается на эффективности движущей силы. Если конечный пункт расположен так, что для его достижения надо плыть против ветра под более острым углом, чем 50°, то зачастую оказывается результативнее плыть к нему зигзагами с углом более 50°, то есть галсами. При этом увеличивается путь, а на поворотах приходится снижать скорость, чтобы не перевернуться. Существует немало случаев, когда траектория движения галсами невозможна или крайне нежелательна. Например, при движении по руслу неширокой реки или при наличии на галсовом пути островков, отмелей и рифов. Направления в интервале от 145° до 180° (категория 1) также относятся к малоэффективным курсам, так как при скорости судна порядка 55% от скорости истинного ветра скорость вымпельного ветра падает настолько, что ресурсы дальнейшего увеличения скорости сводятся к нулю.
Наиболее благоприятными курсы считаются, когда углы имеют интервал 50°–145°. Эти курсы расположены в секторах, обозначенных категорией 2. Они соответствуют направлениям «галфвинд», а также прилегающих к нему участков – «бейдевинд» и «бакштаг». Здесь потолок скорости существенно зависит от остойчивости судна в плане опрокидывания в поперечном направлении. Поэтому по сравнению с килевыми судами более скоростными являются катамараны и тримараны. При одинаковом весе и парусном вооружении их остойчивость выше, а значит, выше и потолок скорости.
На большом судне, плывущем галсами, а также при частых изменениях направления и силы истинного ветра требуются значительные затраты физического труда команды матросов по переустановке парусов. Обслуживающий персонал должен быть всегда в хорошей физической форме. Возможно, это обстоятельство оказалось одной из основных причин, которые побудили экономику отказаться от использования парусных судов при перевозке грузов в пользу судов с тепловыми двигателями. Действительно, куда проще возить в трюмах десяток-другой тонн топлива для двигателя, чем большую команду матросов.
Известные парусники обладают ограниченным вектором тяги. Под вектором тяги подразумеваются сила, движущая парусник, и её направление. При углах менее 35° вектор тяги практически равен нулю. Механизм, который создаёт вектор тяги, принято называть движителем. В обычных парусных судах он состоит из паруса с фиксирующими элементами, корпуса судна и киля. Энергоносителем является ветер, а движение достигается путём скольжения судна по воде за счёт вектора тяги. Многие авторы тандем киля и паруса сравнивают с крыльями самолёта. Отличие заключается в том, что у самолёта оба крыла находятся в одной среде – в воздухе. Поэтому они имеют одинаковую, симметричную конфигурацию. А у судов «одно крыло» (парус) находится в воздухе, а «другое» (киль) – в воде. Плотности воздуха и воды очень разные, потому и столь разными получаются формы этих «крыльев».
В данной работе на суд читателя представлены конструкции парусных судов, которые могут плыть под любым углом к ветру, в том числе –строго против него, то есть без галсов. Предлагаются парусники со свободным вектором тяги, направление которого не зависит от направления истинного ветра. Направление вектора тяги диктуется курсом и задаётся капитаном корабля. Одновременно с конструкциями движителей предлагаются методики расчётов основных динамических параметров.
Поставленная цель была достигнута путём совершенствования известной схемы ветер – парус – корпус судна – киль – вода. Это привело к определённым усложнениям конструкций ветряных движителей, что не воспринималось в качестве преграды. Я исходил из следующего принципа: важно достигнуть нового результата, и если вдруг он окажется востребованным, то в мире современных технологий сложность конструкции движителя не станет проблемой. Зачастую проблема для одних оборачивается успехом для других. Наукоёмкость и технологическая сложность производимого товара становятся барьером между крупными и мелкими фирмами-конкурентами. Например, производством современного автомобиля не может заниматься фирма «средней руки».
Предлагаемые ветряные движители предусматривают автоматическую настройку парусов. Иначе они работать не могут. Наряду с усложнением конструкции, это обстоятельство позволяет отказаться от услуг команды матросов, обслуживающей паруса. Думается, что тем самым может повыситься конкурентоспособность парусных судов такого типа при рассмотрении вопросов морских грузоперевозок.
Представленные в работе конструкции парусников являются в каждом отдельном случае одним из возможных вариантов реализации данной идеи. В случае дальнейшего развития, безусловно, любое из приведённых конструктивных решений может быть усовершенствовано. В предлагаемых конструкциях упор делается главным образом на механизм движителей. Конфигурация, материалы парусов, килей и корпусов судов, практически не рассматриваются. Для многих из предложенных движителей более предпочтительными могут оказаться корпуса катамаранов и тримаранов.