


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ, МОЛОДЕЖИ И СПОРТА УКРАИНЫ
ВОСТОЧНОУКРАИНСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ
ИМ. В. ДАЛЯ
Кафедра "Системная инженерия"
«Теория систем»
Лабораторная работа №7
Тема: «Моделирование систем управление в пакете SIMULINK»
Выполнил: студент:
группа: КТ-792
Проверил:
Луганск 2013
Цель занятия: освоить методы моделирования линейных систем в пакете Simulink, научиться строить переходные процессы, изучить метод компенсации постоянных возмущений с помощью ПИД-регулятора.
1. Исследуется система управления рукой робота, структурная схема которой показана на рисунке.
Рис. 1.1. Система управления рукой робота
Движение руки робота описывается линейной математической моделью в виде передаточной функции
 , где
, где ![]() рад/с,
рад/с,  с
с
Привод моделируется как интегрирующее звено, охваченное единичной отрицательной обратной связью, так что его передаточная функция равна
 ,
, ![]() с
с
Измерительное устройство моделируется как апериодическое звено с передаточной функцией
 ,
, ![]() с
с

Рис. 1.2. Модель системы управления рукой робота
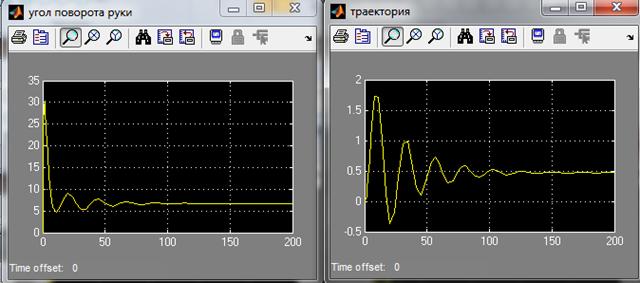
Рис. 1.3. Результаты моделирования
Рис. 1.5. График изменения траектории и угла поворота
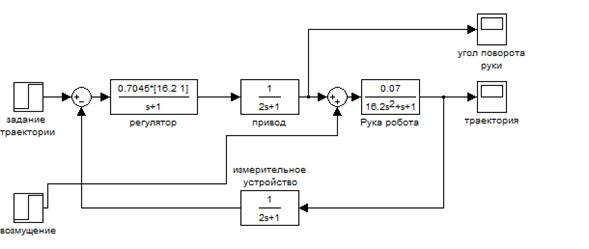
Рис. 1.6. Ориентировочный вид модели Simulink
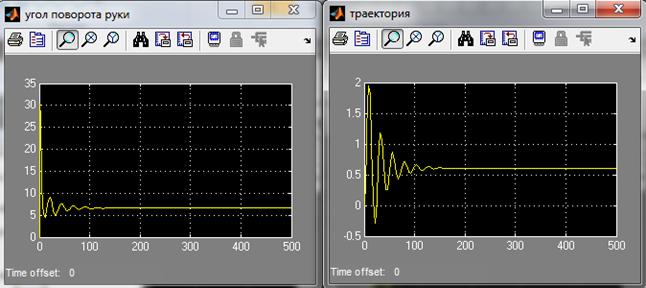
Рис. 1.7. Результаты моделирования
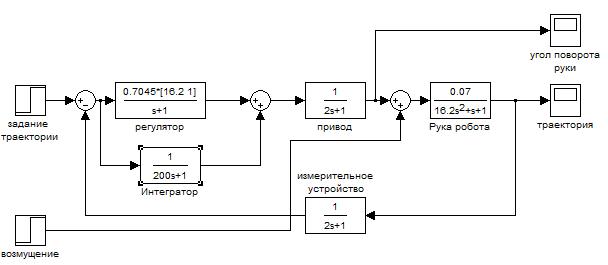
Рис. 1.8. Ориентировочный вид модели Simulink
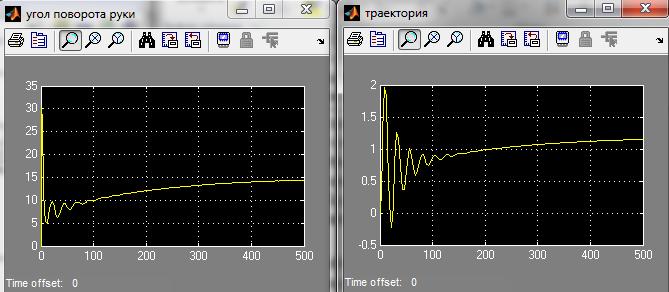
Рис. 1.9. Результаты моделирования
subplot(2, 1, 1);
plot(phi0(:,1), phi0(:,2),...
phi (:,1), phi(:,2));
title('Заданная траектория');
xlabel('Время, сек');
ylabel('\phi, градусы');
legend('ПД-регулятор', ...
'ПИД-регулятор');
subplot(2, 1, 2);
plot(delta0(:,1), delta0(:,2),...
delta (:,1), delta(:,2));
title('Угол поворота руки');
xlabel('Время, сек');
ylabel('\phi, градусы');
legend('ПД-регулятор', ...
'ПИД-регулятор');
Рис. 1.9. График изменения траектории и угла поворота руки
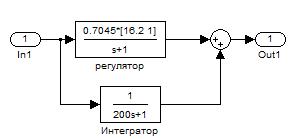

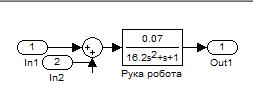
Рис. 1.10. Подсистемы «Регулятор», «Привод» и «Рука робота»
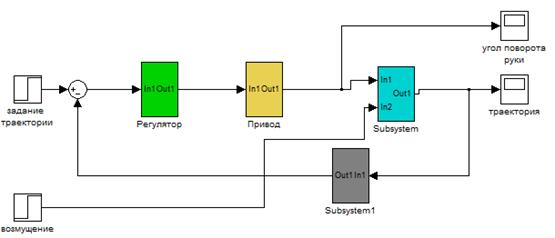
Рис. 1.11. Модель Simulink с подсистемами
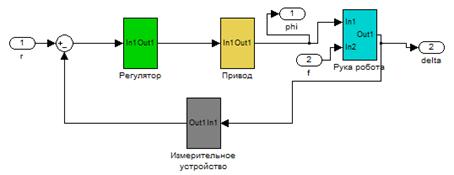
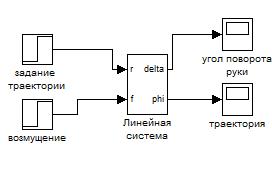
Рис. 1.12. Модель Simulink с подсистемами
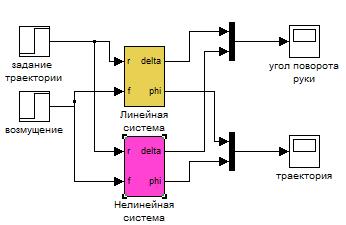
Рис. 1.13. Модель Simulink с подсистемами
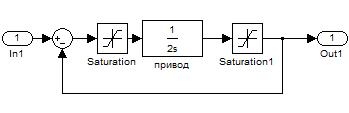
Рис. 1.14. Модель Simulink с блоками Saturation (насыщение)
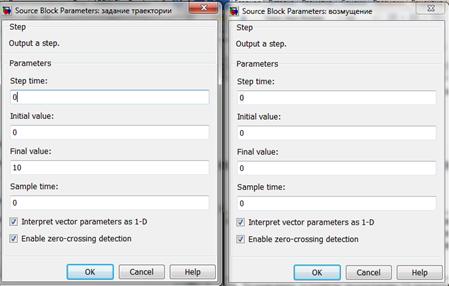
Рис. 1.15. Параметры
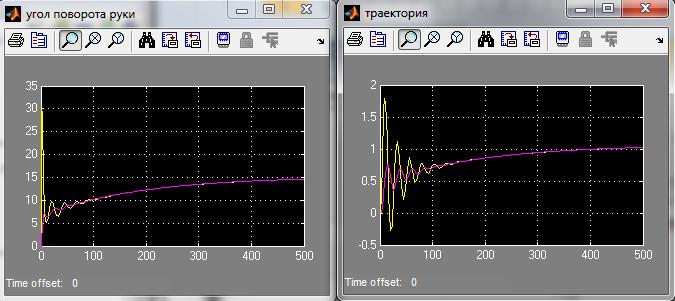
Рис. 1.16. Жёлтый график показывает изменение первого входа осциллографов – (линейная система), фиолетовый – второго (нелинейная система).
Вывод: В ходе выполнения данной лабораторной работы мы освоили методы моделирования линейных систем в пакете Simulink, научились строить переходные процессы, изучили метод компенсации постоянных возмущений с помощью ПИД-регулятора.
