


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Государственное образовательное учреждение высшего профессионального образования
«Белгородский Государственный Технологический Университет им. »
(БГТУ им. )
ИИТУС
Кафедра Технической Кибернетики
Курсовая работа
по дисциплине: «Теория автоматического управления»:
Синтез дискретных систем автоматического управления
Выполнил:
студент группы АП-41
Принял:
Белгород 2008
 |
Содержание
 Задание
Задание
Исследовать следящую систему с сельсинным измерительным устройством (рис. 1); в состав САУ входят сельсинное измерительное устройство СД и СТ (трансформаторный режим включения), фазовый детектор ФД, электромашинный усилитель мощности с поперечным полем ЭМУ, двигатель постоянного тока с независимым возбуждением ДПТ, редуктор РЕД и рабочая машина РМ.

Рис.1. Следящая система с сельсинным измерительным устройством
Вариант | Параметры | ||||||||||||||
σmax, %; tр, с | Тм, с | Тэ, с | Тк, с | Ттп, с | Кред | Кд, ред/Вс | Кдр, ред/Вс | Кфд | Кэму | Ктп | Кэу | Кпот, В/рад | Кθ, В/рад | Ктг, Вс/рад | |
27 | 30; 1,5 | 14,3·10-3 | 6.66·10-3 | 5·10-3 | – | 1/300 | 2.7 | – | 33 | 15 | – | – | – | 68 | – |
 Введение
Введение
Большое внимание к теории и практике дискретных систем объясняется повсеместным распространением, а в последние годы – полным доминированием цифровых систем управления, которые используют в замкнутом контуре управления цифровые вычислительные машины (ЦВМ), микроконтроллеры, микроЭВМ. Обобщенная схема цифровой системы управления содержит цифровую вычислительную машину ЦВМ, которая выполняет роль задающего, сравнивающего и управляющего устройства. Формируемый ЦВМ дискретный сигнал управления при помощи преобразователя дискретного сигнала в непрерывный (ЦАП) передается к непрерывной части системы, объединяющей в своем составе аналоговые усилительно-преобразующие, исполнительные и измерительные элементы, объект управления. Переменные состояния объекта управления при помощи преобразователя непрерывного сигнала в дискретный (АЦП) передаются от объекта управления к ЦВМ.
Системы с ЦВМ обладают существенными преимуществами по сравнению с аналогичными непрерывными системами, поскольку допускают реконфигурацию и перенастройку САУ без изменения в аппаратном обеспечении, только за счет перепрограммирования ЦВМ, многоканальное управление, а также предоставляют легко доступные информационные потоки, позволяющие кроме прямого управления осуществлять функции: контроля, оптимизации, координации и организации всех процессов в рамках современных АСУТП.
 1. Анализ принципа действия САУ. Разработка функциональной схемы САУ
1. Анализ принципа действия САУ. Разработка функциональной схемы САУ
Исследуемая система является замкнутой электромеханической системой автоматического управления, работа которой основана на использовании принципа регулирования по отклонению.
В следящей системе с сельсинным измерительным устройством можно выделить следующие элементы:
1) сельсинное измерительное устройство (сельсин-датчик СД и сельсин трансформатор СТ);
2) фазовый детектор ФД;
3) электромашинный усилитель ЭМУ;
4) исполнительный двигатель ДПТ;
5) редуктор РЕД;
6) рабочий механизм РМ.
Функциональная схема данной САУ представлена на рис. 2.
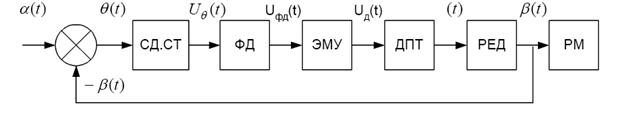
Рис.2. Функциональная схема следящей системы с сельсинным измерительным устройством
Разность углов поворота сельсина-датчика СД и сельсина-трансформатора СТ θ(t)=α(t)–β(t) порождает напряжение на первичной обмотке фазового детектора Uθ(t), которое, усиливаясь, возникает на вторичных обмотках в виде Uфд (t), электромашинный усилитель преобразовывает его в Uд(t), которое подаётся на якорные обмотки ДПТ и порождает вращение двигателя с угловой скоростью w(t), редуктор РД преобразовывает её в изменение угла поворота рабочего механизма β(t).
 2. Передаточные функции элементов, образующие САУ
2. Передаточные функции элементов, образующие САУ
Сельсинное измерительное устройство.
Сельсины в данной системе работают в трансформаторном режиме. Поэтому рассогласование валов рабочих механизмов на угол θ = α – β приводит к возникновению выходного напряжения на обмотке статора сельсина-приёмника, равного ![]() , где
, где ![]() – максимальное эффективное значение э. д. с., индуцируемое на обмотке статора.
– максимальное эффективное значение э. д. с., индуцируемое на обмотке статора.
В данном случае, роторы сельсинов изначально рассогласованы на 90°, поэтому
![]() , на интервале углов – 45° <
, на интервале углов – 45° < ![]() < 45° данную нелинейную зависимость с хорошей точностью можно аппроксимировать линейной функцией
< 45° данную нелинейную зависимость с хорошей точностью можно аппроксимировать линейной функцией
![]() ,
,
![]()
Фазовый детектор.
Осуществляет усиление подаваемого на его вход напряжения
![]() ,
,
![]()
Электромашинный усилитель.
Электромашинный усилитель является в данном случае генератором постоянного тока. Предположим, что генератор находится в режиме холостого хода и в нем отсутствуют потери на гистерезис и вихревые токи, а магнитная характеристика – не насыщена, то есть характеристика намагничивания может быть описана линейной зависимостью магнитного потока и тока возбуждения
![]() , где
, где ![]() - ток обмотки возбуждения,
- ток обмотки возбуждения, ![]() – коэффициент пропорциональности
– коэффициент пропорциональности
Закон Кирхгофа для обмотки возбуждения
![]() .
.
 Уравнение ЭДС якоря с учётом принятых выше допущений примет вид
Уравнение ЭДС якоря с учётом принятых выше допущений примет вид
![]() ,
,
откуда ![]() и
и ![]() .
.
Подставляем,
![]() ,
,
![]() .
.
Так как напряжение на зажимах генератора UД = ea, а напряжение возбуждения соответствует uВ = UФД, и КЭМУ=KU, TК=TВ, передаточная функция будет иметь вид
![]() .
.
Двигатель постоянного тока.
Для якорной цепи на основании закона Кирхгофа справедливо следующее уравнение: ![]() , где eД – э. д.с., наводимая в обмотке якоря магнитным потоком обмотки возбуждения ФВ, равная
, где eД – э. д.с., наводимая в обмотке якоря магнитным потоком обмотки возбуждения ФВ, равная ![]() , се – электрическая постоянная двигателя.
, се – электрическая постоянная двигателя.
Уравнение механического равновесия двигателя записывается на основании закона сохранения моментов: MД=Mc+MH, где MH – динамический момент якоря двигателя, равный произведению момента инерции якоря на его угловое ускорение.
![]() .
.
Моментом сопротивления, равным моменту трения в осях, можно пренебречь.
![]() ,
,
![]() ,
,
![]() .
.
![]() ,
,
 Введем обозначения
Введем обозначения  ,
,  ,
,  .
.
Отсюда передаточная функция имеет вид

Редуктор.
 ,
,
 3. Разработка структурной схемы САУ
3. Разработка структурной схемы САУ
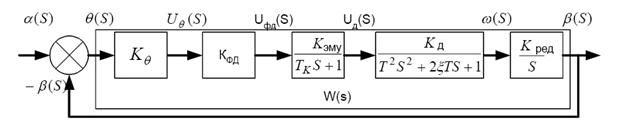
Рис.3. Структурная схема следящей системы с сельсинным измерительным устройством
Передаточная функция разомкнутой системы

Передаточная функция замкнутой системы

![]() .
.
 4. Анализ устойчивости исходной САУ
4. Анализ устойчивости исходной САУ
Характеристическое уравнение имеет вид:
![]() ,
,
Подставив численные значения получим:
![]() .
.
Корни характеристического полинома:
p1= -204,078 + 97,637i,
p2= -204,,637i,
p3= 29,047 + 107,638i,
p4= 29,047 + 107,638i.
Два комплексно-сопряжённых корня находятся в правой полуплоскости, следовательно, система неустойчива.
Переходная характеристика системы показана на рисунке 4.
|
Рис.4. Переходная характеристика системы
 4.1 Критерий Гурвица
4.1 Критерий Гурвица
Матрица Гурвица имеет вид:
Определители для данной матрицы равны:
Δ4 = =-1,735·10-3,
=-1,735·10-3,
Δ3 = =-5,727·10-6,
=-5,727·10-6,
Δ2 = =2,691·10-6,
=2,691·10-6,
Δ1 =![]() .
.
Чтобы замкнутая система была устойчивой необходимо, чтобы её угловые миноры и главный определитель были больше нуля. Это условие не выполняется. Следовательно, замкнутая система неустойчива.
 4.2 Критерий Михайлова
4.2 Критерий Михайлова
|
Согласно критерию Михайлолва, замкнутая система будет устойчива, если годограф Михайлова, начинаясь на вещественной оси, отсекает отрезок, равный свободному коэффициенту характеристического уравнения замкнутой системы, проходит последовательно n квадрантов в положительном направлении против часовой стрелки, нигде не обращаясь в ноль, где n порядок системы.
Годограф Михайлова имеет вид:

Заменим s→jω и выделим действительную U(ω) и мнимую V(ω) части:

Годограф Михайлова приведен на рисунке 5:
|
Рис.5. Годограф Михайлова
Годограф начинается на вещественной оси и отсекает отрезок, равный свободному коэффициенту характеристического уравнения, но не пересекает последовательно требуемое число квадрантов против часовой стрелки. Следовательно, система неустойчива.
 4.3 Критерий Найквиста
4.3 Критерий Найквиста
|
Корни характеристического уравнения разомкнутой системы:
p1= 0,
p2= -205.746,
p3= -72.159 + 70.709i,
p4= -72.159 – 70.709i.
Система находится на грани апериодической устойчивости. Следовательно, критерий устойчивости Найквиста будет выражаться так: чтобы система являлась устойчивой в замкнутом состоянии необходимо и достаточно, чтобы КЧХ разомкнутой системы, дополненная дугой окружности бесконечно большого радиуса, при изменении частоты от нуля до бесконечности не охватывала точку (-1;j0).
КЧХ системы приведена на рисунке 6.
Рис.6. КЧХ разомкнутой системы.
Как видно, КЧХ разомкнутой системы, дополненная дугой окружности бесконечно большого радиуса, охватывает точку (-1;j0). Следовательно, замкнутая система неустойчива.
 4.3 Логарифмический критерий устойчивости
4.3 Логарифмический критерий устойчивости
Для определения устойчивости по критерию Найквиста можно строить не КЧХ, а ЛАЧХ и ЛФЧХ. Тогда критерий устойчивости можно сформулировать следующим образом: для устойчивости системы необходимо и достаточно чтобы частота среза была меньше частоты, при которой ЛФЧХ пересекает линию -π.
ЛАЧХ и ЛФЧХ системы приведены на рисунках 7 и 8 соответственно.
|
Рис.7. ЛАЧХ разомкнутой системы
|
Рис.8. ЛФЧХ разомкнутой системы
Частота среза больше частоты, при которой ЛФЧХ пересекает линию -π. Следовательно, система неустойчива.
5. Расчет корректирующего звена методом ЛАЧХ.
Задача синтеза корректирующего устройства заключается в расчете такой передаточной функции Wку(s) , чтобы заданная система W(s), соединённая последовательно с корректирующим устройством и охваченная обратной связью, обладала требуемым качеством.

Располагаемая ЛАЧХ.
Частоты сопряжения:
![]() с-1,
с-1,
![]() с-1.
с-1.
Желаемая ЛАЧХ.
По заданным показателям качества Tp = 1.5c σ = 30% определим, что
![]() , откуда:
, откуда:
![]() с-1.
с-1.
1) Проводятся линии L(ω)= +11Дб и L(ω)= -11дБ.
2) Через точку (![]() ,0) проводится прямая с наклоном –20дБ/дек до ее пересечения с линиями, построенными в пункте 1.
,0) проводится прямая с наклоном –20дБ/дек до ее пересечения с линиями, построенными в пункте 1.
3) В области высоких частот желаемая ЛАЧХ строятся параллельно располагаемой ЛАЧХ.
4) Находится требуемый коэффициент усиления  .
.
5) Через точку (1 с-1, 20lg(Kc)) проводится прямая с наклоном -20Дб/дек.
6) От точки, ограничивающей область средних частот слева, проводится прямая с наклоном -40дБ/дек до пересечения с низкочастотной частью желаемой ЛАЧХ.
 Запретная область:
Запретная область:
1) Отмечаем точку с ![]()
 .
.
2) Влево от точки проводится прямая -20дБ/дек, а вправо -40дБ/дек.
 Желаемая ЛАЧХ не попадает в запретную область. Это означает, что при данном коэффициенте Кс обеспечивается заданная точность слежения.
Желаемая ЛАЧХ не попадает в запретную область. Это означает, что при данном коэффициенте Кс обеспечивается заданная точность слежения.
Передаточная функция корректирующего устройства имеет вид:
Передаточная функция скорректированной системы будет иметь вид:

 6. Анализ скорректированной системы.
6. Анализ скорректированной системы.
Переходный процесс скорректированной системы приведен на рисунке 9.
|
Рис.9. Переходный процесс скорректированной системы
Перерегулирование скорректированной системы:
![]()
Время регулирования (ошибка равна 3%): 1.428 с.
Запас устойчивости определяется по ЛАЧХ и ЛФЧХ, которые приведены на рисунке 10.
Запас устойчивости по амплитуде составляет: 28 дБ/дек
Запас устойчивости по фазе составляет: 71o
 10. ЛАЧХ и ЛФЧХ скорректированной системы
10. ЛАЧХ и ЛФЧХ скорректированной системы
 7. Дискретизация последовательного корректирующего звена методом аппроксимации операции интегрирования, получение передаточной функции цифровой САУ и анализ устойчивости системы.
7. Дискретизация последовательного корректирующего звена методом аппроксимации операции интегрирования, получение передаточной функции цифровой САУ и анализ устойчивости системы.
Структурная схема САУ с цифровым устройством управления будет иметь вид, представленный на рисунке 11.

Рис.11. Структурная схема САУ с цифровым устройством управления
Передаточная функция корректирующего устройства имеет вид:
![]()
Для получения дискретной передаточной функции делается замена:

Дискретная передаточная функция корректирующего устройства будет иметь вид:

Период дискретизации: ![]() .
.
Тогда:
Передаточная функция цифровой САУ имеет вид
![]() .
.
Если ЦАП представляет собой фиксатор нулевого порядка, то передаточная функция системы может быть получена в виде:
 ,
,
 где
где 
Найденная при помощи MathCAD 14 передаточная функция имеет вид:
|

Передаточная функция замкнутой системы:
|

