
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство образования Российской Федерации
Томский политехнический университет
УТВЕРЖДАЮ
Директор ИДО
____________
«___»_____________2006 г.
ИДЕНТИФИКАЦИЯ И ДИАГНОСТИКА СИСТЕМ
Программа, методические указания и контрольное задание по курсу «Идентификация и диагностика систем» для студентов специальности 220201 «Управление и информатика в технических системах» института дистанционного образования
Семестр 8
Лекции, часов 10
Лабораторные занятия, часов 8
Контрольная работа 1
Самостоятельная работа, часов 72
Форма контроля экзамен
Томск 2006
УДК 62.50
Идентификация и диагностика систем
Раб. программа, методические указания и контрольное задание по курсу «Идентификация и диагностика систем» для студентов специальности 220201 «Управление и информатика в технических системах» ИДО / Составитель – Томск: Изд. ТПУ, 2006. – 20 с.
Рабочая программа, методические указания и контрольные задания рассмотрены и рекомендованы к изданию методическим семинаром кафедры автоматики и компьютерных систем “____”___________ 2006г.
Зав. кафедрой, профессор, докт. техн. наук ___________
Аннотация
Программа по курсу “Идентификация и диагностика систем” предназначена для студентов специальности 220201 “Управление и информатика в технических системах” и содержит следующие основные разделы: оценивание параметров статических моделей, основы планирования эксперимента, идентификация линейных динамических систем, адаптивные алгоритмы идентификации, основы технической диагностики. Разработчик – доцент кафедры АиКС , е-mail: vk@ aics.ru.
1. ЦЕЛИ И ЗАДАЧИ ИЗУЧЕНИЯ ДИСЦИПЛИНЫ
1.1. Цели преподавания дисциплины
Целью преподавания дисциплины является:
- приобретение студентами знаний в области теории идентификации, диагностики и моделирования объектов управления;
- приобретение студентами навыков использования методов идентификации и моделирования при построении математических моделей действующих технических систем.
1.2. Задачи изучения дисциплины
В результате изучения дисциплины студенты должны:
- понимать цели построения математических моделей объектов управления при создании АСУТП и САУ;
- знать основные методы идентификации в статике и динамике;
- знать основные подходы к решению задачи диагностики технических систем;
- уметь построить математическую модель заданного класса по данным активного и пассивного эксперимента;
- знать направления развития современной теории идентификации, использовать идеи, методы, алгоритмы при решении прикладных научных задач.
1.2. Рекомендации по изучению дисциплины
Курс «Идентификация и диагностика систем» является обязательным курсом, предусмотренным Государственным образовательным стандартом по специальности 220201. Теория моделирования и идентификации являются частью современной теории управления. Подобный курс изучается во всех высших учебных заведениях, готовящих специалистов по управлению в технических системах. Об этом говорит список авторов приведенной учебной литературы: Д. Гроп – профессор университета штата Колорадо, США; К. Спиди – профессор университета Нового Южного Уэльса, Австралия; Дж. Мелса – зав. кафедрой электротехники, США; Л. Льюнг – профессор Массачусетского технологического института (США) и университета г. Линчепинга (Швеция). Достаточно много литературы отечественных авторов, однако вузовского учебника нет. Возможно это объясняется тем, что программа курса весьма обширна и включает в себя многообразные методы и направления. Как правило, каждый автор подробно излагает те вопросы, которые ему ближе, не касаясь многих других.
Основные сведения по данному курсу изложены в учебном пособии [2], специально подготовленному для студентов ИДО.
Занятия по курсу «Идентификация и диагностика систем» у студентов-заочников включает в себя лекции и лабораторные занятия. Последние выполняются на ПЭВМ в дисплейных классах кафедры и заключаются в изучении и исследовании различных методов идентификации и практическом применении методов математической статистики.
2. СОДЕРЖАНИЕ ТЕОРЕТИЧЕСКОГО РАЗДЕЛА ДИСЦИПЛИНЫ
Тема 1. Модели объектов управления
Основные понятия о моделях и методах их построения. Назначение моделей, классификация методов идентификации. Технологические процессы как объекты управления. Особенности непрерывных технологических процессов. Неизбежность упрощения модели по сравнению с реальным объектом. Выделение управляющих, возмущающих и выходных переменных. Анализ типовых промышленных агрегатов как объектов управления. Способы упрощения моделей: линеаризация, понижение порядка системы, агрегирование и декомпозиция сложных моделей.
Модели объектов управления в статике. Модели динамических систем. Параметрические модели: передаточные функции, дифференциальные уравнения, модели в пространстве состояний. Непараметрические модели: переходная и импульсная переходная функции. Связь различных видов описания между собой.
Применение уравнений материального и энергетического балансов в статике и динамике для получения математических моделей. Модель объекта управления в САР уровня.
Методические указания.
В этой теме несколько разделов. Во-первых, вводный раздел. Необходимо ознакомиться с терминологией, классификацией методов построения моделей. Этот материал есть в начале каждой книги по идентификации и моделированию. Во-вторых, представление промышленных технологических объектов как объектов управления. Нужно уметь выделить цель управления, параметры, которые характеризуют степень достижения этой цели (выходные параметры), управляющие переменные и возмущения, которые влияют на выходные параметры. В качестве простейшего объекта управления, на примере которого рассматриваются все эти вопросы в [9,15] взят теплообменник – широко распространенный в промышленности агрегат. При изучении этого раздела студенты могут в качестве примеров использовать те процессы, с которыми им приходится иметь дело по работе. В [20], например, проводится всесторонний анализ такого объекта управления, как котлоагрегат.
Следующий раздел знаком студентам по дисциплине ТАУ. Поскольку при идентификации используются модели динамических систем в различной форме, необходимо повторить, какие формы записи динамических моделей существуют, как они связаны друг с другом. Например, как по дифференциальному уравнению получить передаточную функцию, или, как зная передаточную функцию, найти переходную характеристику и т. д. Кратко эти вопросы изложены в [2], стр. 10-15. Последний раздел темы связан с аналитическим выводом уравнений объекта управления. Этот материал подробно изложен в [17,19] и кратко – в [2]. В качестве простейшей модели получим аналитически модель объекта управления в САР уровня.
Пусть стоит задача автоматического регулирования уровня в емкости путем изменения выходного потока. Возмущающее воздействие – входной поток. Требуется определить модель объекта управления. Из уравнения материального баланса в динамике имеем:
К![]() = Fвх - Fвых ,
= Fвх - Fвых ,
где К![]() - мгновенное изменение объема в емкости;
- мгновенное изменение объема в емкости;
Fвх, Fвых – входной и выходной объемные потоки;
h – выходной параметр для данной САР, т. е. уровень.
Рис.1
Т. к. Fвх, Fвых имеют размерность м3/с, то К – должен иметь размерность м2 (это площадь зеркала жидкости в емкости). Поскольку регулирование уровня ведется по выходному потоку, то уравнение, связывающее выходной и управляющий параметр, имеет вид: К
![]() = - Fвых(t).
= - Fвых(t).
Переходя от этого дифференциального уравнения к передаточной функции, получим:
W(S) = - ![]() , где
, где  .
.
Этот небольшой пример показывает, как можно получить модель объекта управления аналитическим путем, не прибегая к эксперименту. Отметим, что если бы стояла задача регулирования уровня путем изменения входного потока, то модель объекта управления могла быть принципиально другой. Так, если бы выходной поток свободно выливался из емкости, то тогда, по законам физики, он зависим от уровня, причем нелинейно. В этом случае модель объекта управления могла быть записана в виде нелинейного дифференциального уравнения первого порядка. Линеаризация в окрестности рабочей точки приведет к модели для отклонений в виде апериодического звена первого порядка. Но если выходной поток не зависит от уровня, например, жидкость выкачивается из емкости насосом, то приведенное выше уравнение материального баланса справедливо и модель объекта управления может быть представлена передаточной функцией идеального интегрирующего звена со знаком «плюс».
Вопросы, связанные с различными формами моделей и их взаимосвязью, изложены в учебниках по ТАУ и в [2, 1, 5]. Аналитический подход к построению моделей промышленных объектов управления приведен в [2, 17, 19].
Вопросы для самопроверки.
1. Что такое идентификация?
2. Перечислите особенности непрерывных технологических процессов как объектов управления.
3. Как получить уравнение статики, если известна модель объекта в виде передаточной функции?
4. Задана модель в пространстве состояний:
 u ,
u ,
у=
где х, u, у – переменные состояния, управления, наблюдения соответственно.
Получить модель в виде передаточной функции W(S).
5. Задана модель в форме дифференциального управления:

Найти модель в форме передаточной функции W(S), импульсной реакции g(t), переходной функции h(t).
6. Сформулируйте условия материального и энергетического балансов в динамике.
Тема 2. Идентификация объектов управления в статике.
Обработка статистических данных. Сглаживание результатов наблюдений, отбрасывание аномальных значений. Расчет математического ожидания, дисперсии, среднеквадратической ошибки, автокорреляционной и взаимнокорреляционных функций по экспериментальным данным. Расчет коэффициентов взаимной корреляции. Нормированный коэффициент взаимной корреляции. Применение корреляционного анализа для оценки степени влияния возмущающих и управляющих переменных на выходную переменную.
Оценка коэффициентов модели методов наименьших квадратов (МНК). Предпосылки применения МНК. Алгоритм МНК в матричной форме. Взвешенный МНК, рекуррентный и текущий МНК. Метод максимального правдоподобия.
Регрессионный анализ. Уравнение множественной регрессии. Предпосылки использования метода. Оценка коэффициентов регрессии. Статистический анализ уравнений регрессии. Вычисление остаточной дисперсии, дисперсии и ковариации коэффициентов регрессии. Исследование остатков. Проверка значимости коэффициентов регрессионной модели. Коэффициент множественной корреляции.
Методические указания
Перед изучением темы необходимо повторить основы математической статистики: как по результатам измерений параметров вычислить математическое ожидание, дисперсию, коэффициент взаимной корреляции. МНК – основной инструмент при получении оценок параметров, как статических, так и динамических моделей. МНК и его разновидности изложены в [1,2,3,4,5,7,10, 11, 12].
По регрессионному анализу существует своя достаточно обширная литература. Книга Дрейпера и Смита [13] – одна из лучших, для тех, кто хочет самостоятельно изучить этот вопрос поглубже. Основы регрессионного анализа даны в [2, 3, 11]. В регрессионном анализе можно выделить задачу получения коэффициентов модели, которая решается МНК. Собственно анализ начинается после получения модели. Проводится исследование значимости коэффициентов модели ( а не равны ли из них некоторые нулю?), исследование остатков (ошибки моделирования), степени соответствия выходных сигналов модели и объекта. Исследование всех этих вопросов базируется на методах математической статистики.
Вопросы для самопроверки
1. Нарисуйте 2 случайных процесса, таких, чтобы дисперсия первого была больше дисперсии второго.
2. При оценке степени влияния параметров x1 и х2 на параметр у были подсчитаны нормированные коэффициенты взаимной корреляции Rx1y = 0,45 и Rx3y = - 0,65. Какой из параметров, х1 или х2 , сильнее влияет на у? Что означает отрицательный коэффициент корреляции?
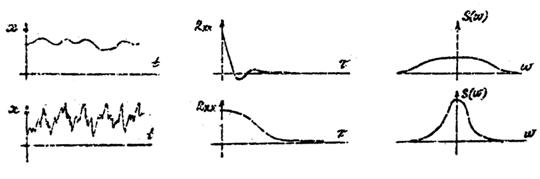 |
3. На рисунках изображены два случайных процесса (а), две автокорреляционные функции (б) и две спектральные плотности (в). Какому случайному процессу какие автокорреляционные функции и спектральные плотности соответствуют?
4. Перечислите по порядку основные операции, выполняемые в регрессионном анализе.
5. При каких условиях оценки коэффициентов модели, полученные по методу наименьших квадратов, совпадают с оценками, полученными по методу максимального правдоподобия?
Тема 3. Планирование эксперимента
Основные положения теории планирования эксперименты. Полный факторный эксперимент на двух уровнях. Требования к организации эксперимента. Кодированные значения факторов. Свойства матрицы планирования. Вычисление оценок коэффициентов модели. Статистический анализ результатов.
Методические указания.
Планированием эксперимента называется процедура выбора числа и условий проведения опытов, необходимых и достаточных для нахождения модели требуемой точности. К основным особенностям планирования эксперимента относятся: стремление к минимизации числа опытов, одновременное варьирование всеми параметрами, выбор четкой стратегии, позволяющей принимать обоснованные решения после каждой серии экспериментов. Теория планирования эксперимента, так же как и регрессионный анализ, базируется на математической статистике, поэтому статистический анализ результатов построения модели в регрессионном анализе и планировании эксперимента практически одинаков. Теория планирования эксперимента разработана для получения статических моделей. При этом предполагается, что исследователь может устанавливать значения входных воздействий на изучаемый объект по своему желанию. Основы планирования эксперимента хорошо изложены в книгах Ю. Адлера [21], В. Налимова. Кратко вопросы планирования эксперимента изложены в [2].
Вопросы для самопроверки.
1. Что такое рандомизация?
2. Сколько опытов нужно провести при полном факторном эксперименте (ПФЭ) для 3-х факторов и 2-х уровней? Составьте матрицу планирования для этого случая.
3. Зачем переходят к кодированным переменным? Каким образом?
4. Проведен ПФЭ типа 22. Можно ли по данным эксперимента оценить коэффициенты модели y=a0+a1x1+a21x1x2+a2x2 ?
модели y=a0+a1x1+a2x2 ? y=a0+a1x1+a11x12+a2x2 ?
5. Почему в регрессионном анализе при отбрасывании незначимых коэффициентов модели все оставшиеся коэффициенты пересчитываются заново, а в ПФЭ – нет?
Тема 4. Определение моделей динамических систем по данным активного эксперимента.
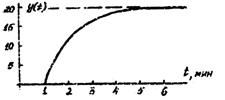
Простейшие тестирующие сигналы: импульс, единичный скачок, гармонический сигнал. Определение постоянной времени и коэффициента усиления апериодического звена 1-го порядка по его переходной и импульсной переходной функции. Определение передаточной функции по переходной характеристике интегрирующего звена. Учет чистого запаздывания. Определение передаточных функций по переходным характеристикам для колебательных звеньев и апериодических звеньев высоких порядков. Частотный метод идентификации.
Методические указания.
Материалы по этой теме можно найти не только в книгах по идентификации и моделированию, но и литературе по теоретическим и практическим вопросам автоматического регулирования. При построении локальных систем автоматического регулирования зачастую приходится определять переходную характеристику (кривую разгона) путем подачи ступенчатого воздействия. Как правило, переходная характеристика в качестве самостоятельной модели не используется, но по виду ее можно оценить порядок передаточной функции, восстановить значения параметров W(S). Промышленные объекты управления, с точки зрения ТАУ, часто являются апериодическими звеньями высокого порядка. Такие объекты обычно аппроксимируют апериодическими звеньями первого или второго порядка с запаздыванием. Материал по теме изложен в [1-3,5,8,16].
Вопросы для самопроверки.
1. Как выглядит переходная функция апериодического звена первого порядка? более высоких порядков? интегрирующего звена? колебательного?
2. Какими моделями наиболее часто аппроксимируют промышленные объекты управления? Запишите эти модели в виде передаточных функций и дифференциальных уравнений.
3. Известен график импульсной переходной функции (но не ее аналитическое описание). Как построить переходную функцию?
4. Какие параметры переходной функции колебательного звена необходимо знать, чтобы получить коэффициенты дифференциального уравнения?
5. На вход апериодического звена первого порядка подается гармонический сигнал заданной частоты и амплитуды. Какие параметры выходного сигнала надо знать, чтобы решить задачу идентификации?
Тема 5. Идентификация линейных динамических систем по данным пассивного эксперимента.
Оценка параметров дифференциального уравнения. Проблема оценки коэффициентов дифференциальных уравнений высоких порядков. Разностные уравнения. Переход от дифференциального уравнения к разностному. Оценка коэффициентов разностных уравнений методом наименьших квадратов.
Уравнение Винера-Хопфа. Методы решения интегрального уравнения Винера-Хопфа. Понятие о некорректно поставленных задачах. Регуляризация решения основного уравнения идентификации. Уравнение Винера-Хопфа в частотной области. Получение модели в виде передаточной функции с учетом физической реализации. Метод типовой идентификации .
Методические указания.
В этой теме можно выделить два раздела: параметрическая идентификация объектов управления по данным эксперимента и вопросы, связанные с решением уравнения Винера –Хопфа. В первом разделе необходимо уметь перейти от дифференциального уравнения к разностному и определить коэффициенты последнего МНК. Переход от непрерывной модели к дискретной связан с тем, что, во-первых, непрерывные задачи можно аппроксимировать дискретными с любой степенью точности. Во-вторых, развитие цифровой техники для управления привело к необходимости использования дискретных моделей. И, в-третьих, математическое исследование дискретных объектов в ряде случаев проще, чем непрерывных.
Уравнение Винера-Хопфа связывает между собой корреляционные функции и импульсную реакцию объекта. Поэтому, решив уравнение, можно получить описание объекта, но в непараметрической форме (график импульсной реакции). Но на практике сразу встанет вопрос о дальнейшем изучении объекта управления, т. е. определение параметров W(S) (см. тему 4). Однако при численном решении уравнения Винера-Хопфа обычно получается решение, абсолютно далекое от истины. Это связано с тем, что эта задача относится к классу некорректно поставленных задач (есть такая математическая формулировка). В частности, небольшие ошибки в исходных данных могут приводить к огромным отклонениям в решении задачи. Для решения подобных задач академиком в 70-е годы был предложен так называемый метод регуляризации. При этом численное решение уравнения Винера-Хопфа становится устойчивым.
Если применить к уравнению Винера-Хопфа двухстороннее преобразование Фурье, то получим алгебраическое уравнение, связывающее спектральную плотность входного сигнала, взаимную спектральную плотность и передаточную функцию. Однако, если находить из этого уравнения передаточную функцию, то можно получить неверный ответ – передаточную функцию физически нереализуемой системы. Поэтому, решая задачу идентификации в частотной области, необходимо учитывать дополнительные условия по физической реализации модели. Вопросы по теме 5 изложены в [1-5,7,12,18].
Вопросы для самопроверки.
1. Дано дифференциальное уравнение ![]() .
.
Перейти к разностному уравнению при  .
.
2. Какие условия должны быть связаны интервал дискретизации ![]() и постоянной времени Т при переходе от непрерывной модели к дискретной?
и постоянной времени Т при переходе от непрерывной модели к дискретной?
3. Почему для идентификации применяется уравнение Винера-Хопфа и не используется уравнение свертки, хотя по структуре они схожи?
4. Как на практике проявляется некорректность задачи решения уравнения Винера-Хопфа?
Тема 6. Адаптивные алгоритмы идентификации.
Общая схема текущей идентификации. Алгоритм стохастической аппроксимации и его модификации. Условия сходимости алгоритма стохастической аппроксимации. Методы увеличения скорости настройки параметров модели. Рекуррентное вычисление математического ожидания и дисперсии. Алгоритм Качмажа. Многошаговые алгоритмы.
Методические указания.
В этой теме изучаются алгоритмы подстройки параметров модели при появлении новых измерений входных и выходных сигналов объекта. К классу адаптивных алгоритмов можно отнести рекуррентный и текущий метод наименьших квадратов, которые изучались в теме 2. Алгоритмы стохастической аппроксимации намного проще рекуррентного МНК, хотя и уступают ему в точности. Существуют много разновидностей одношаговых алгоритмов идентификации. Основной сравнительной характеристикой для них является скорость сходимости параметров модели. Материал по теме изложен в [3,4,7,9,11,15,22]; причем наиболее ясно – в [4, 11].
Вопросы для самопроверки.
1. Запишите выражение для пересчета коэффициентов модели a, b по методу стохастической аппроксимации. Модель задана следующим выражением: Y = a + b X, Y, X – выходной и входной сигналы соответственно.![]()
![]()
2. В чем отличие одношаговых и многошаговых алгоритмов идентификации?
3. По каким критериям можно сравнить между собой адаптивные алгоритмы идентификации?
Тема 7. Основы технической диагностики
Задачи технической диагностики. Виды неисправностей технических систем. Отказы: постепенные, внезапные, скачкообразные, постоянные. Причины дефектов.
Диагностические модели. Связь параметров технического состояния и диагностических признаков. Структура типовой системы диагностики.
Требования к первичной диагностической информации. Выделение информационных признаков. Спектральные методы диагностики технических систем. Классификация состояний технических систем. Основы теории распознавания образов и ее применение в диагностике.
Применение нечетких множеств в задачах технической диагностики. Основные понятия теории нечетких множеств. Построение системы диагностики на основе нечетких множеств.
Методические указания
Основными задачами технической диагностики являются распознавание состояния системы, определение причин нарушения ее работоспособности, установление вида и места дефекта, а также прогнозирование его изменения. Решение многих этих задач базируется на использовании диагностических моделей, полученных с применением методов идентификации. Одним из главных моментов в диагностике является выявление характера связей между фактическим состоянием диагностируемой системы и некоторыми измеряемыми параметрами. Так же как и в идентификации, в диагностике используется большое число методов из различных научных дисциплин. Для решения задач диагностики, связанных с вибрацией, широко используются методы, основанные на частотном анализе диагностических сигналов. Для классификации состояний объектов диагностики применяется теория распознавания образов. Для диагностики состояния управляемых технологических процессов в последние годы нашла применение теория нечетких множеств [26]. При этом для описания состояния диагностируемой системы используются слова и обороты естественного языка. Например, при контроле уровня в емкости могут использоваться такие понятия (они носят название термов) как «очень низкий», «низкий», «допустимый» и т. п. Далее строится описание зависимости между термами и операциями по управлению вида «если уровень достаточно низкий, открыть клапан на 30%». В небольшом курсе невозможно ознакомиться со всеми методами и задачами технической диагностики. В данном случае стоит задача получить начальные знания по этой проблеме. Хорошим пособием является книга [6], изданная в ЛЭТИ. Основы технической диагностики см. также в [23-25].
Вопросы для самопроверки
1. Какова структура типовой системы диагностики?
2. Назовите информативные параметры сигнала, представляющего собой гармонические колебания и дискретного сигнала состоящего из последовательности прямоугольных импульсов.
3. Запишите выражение прямого преобразования Фурье. Какие проблемы могут возникнуть при практическом использовании этого преобразования?
4. Приведите примеры численных характеристик процессов во временной и в частотной областях, которые можно было бы использовать для задач диагностики.
3. СОДЕРЖАНИЕ ПРАКТИЧЕСКОГО РАЗДЕЛА ДИСЦИПЛИНЫ
3.1. Перечень лабораторных работ
1. Построение линейной регрессионной модели с помощью полного факторного эксперимента.
2. Исследование адаптивных алгоритмов идентификации.
3. Элементы математической статистики (проверка гипотез).
4. КОНТРОЛЬНАЯ РАБОТА
4.1. Общие методические указания
Контрольная работа состоит из трех заданий. Первое задание по теме 4 предполагает определение передаточной функции динамического объекта по известной его реакции на ступенчатое (но не единичное) возмущение. В таблице 1 приведены необходимые данные. Во втором задании необходимо ответить на некоторые из вопросов, которые приведены в конце каждой темы. Третье задание по теме 5 связано с определением модели в виде разностного уравнения по экспериментальным данным с помощью МНК. Номера вариантов в заданиях №№1, 3 соответствуют последней цифре шифра студента. Номер варианта в задании №2 определяется сложением 2-х цифр шифра. Если при этом получилось двузначное число, вариант определяется младшей цифрой этого числа.
Методика выполнения первого задания изложена в [1,2,3]. Не забудьте учесть, что входное ступенчатое воздействие – не единичная функция 1(t).
Коэффициенты модели в задании №3 рассчитываются методом наименьших квадратов, подробности см. в [1,2,3]. При Оформлении задания необходимо привести все промежуточные выводы, построения, графики.
4.2. Варианты контрольных заданий
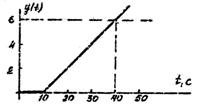
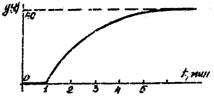
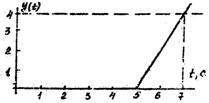
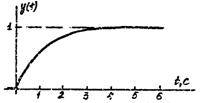
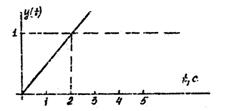
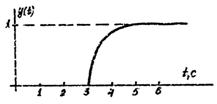
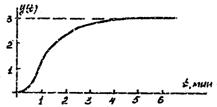
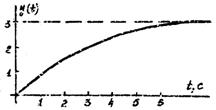
1. Определить передаточную функцию объекта управления, реакция которого на ступенчатое возмущение приведена в таблице 1. Номер варианта соответствует номеру вашего шифра.
Таблица 1
Номер варианта | Входной сигнал | Реакция объекта |
1 | 2 | 3 |
0 | 10 |
|
1 | 2 |
|
2 | 4 |
|
3 | 2 |
|
1 | 0,5 |
|
5 | 10 |
|
6 | 0,.2 |
|
7 | 100 |
|
8 | 2 |
|
9 | 0,5 |
|
2. Ответьте на вопросы, перечисленные в конце каждого раздела рабочей программы. Номера вопросов для каждого варианта приведены в таблице 2.
Таблица 2
Номер варианта | Номер раздела | Номер вопроса |
1 | 2 | 3 |
0 | 1 2 3 | 5 1 2 |
1 | 1 2 3 | 3 2 3 |
2 | 1 2 3 | 4 3 4 |
3 | 2 4 5 | 4 1 1 |
4 | 4 5 6 | 2 2 1 |
5 | 4 5 6 | 4 3 2 |
6 | 4 7 6 | 5 2 3 |
7 | 4 2 1 | 3 1 5 |
8 | 1 2 3 | 6 3 4 |
9 | 2 4 5 | 2 1 1 |
3. Идентифицируйте дискретную систему первого порядка y[n+1]=ay[n]+bu[n] на основании данных о входе и выходе, приведенных в таблице 3. Пример взят из [3] и используется при обучении студентов университета штата Колорадо, США.
Постройте график изменения выхода y[n], график выхода модели yм[n+1]=ay[n]+bu[n] и график выхода модели yм[n+1]=ayм[n]+bu[n]. Cделайте выводы о пригодности модели для описания объекта управления.
Студенты, имеющие шифр 0, используют первые 11 точек из таблицы 3, шифр 1 – вторые 11 точек и т. д. до шифра 8 включительно. Студенты, имеющие шифр 9, используют последние 11 точек из таблицы 3.
Таблица 3
n | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
u[n] | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 1 |
y[n] | -5 | -4 | -4 | -2 | -2 | -2 | 0 | 1 | 1 | 0 | 2 |
n | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 |
u[n] | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 0 |
y[n] | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 2 | 1 | 1 | 2 |
n | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 |
u[n] | 1 | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 0 |
y[n] | 1 | 2 | 2 | 1 | 1 | 2 | 2 | 2 | 2 | 1 | 0 |
n | 33 | 34 | 35 | 36 | 37 | 38 | 39 | 40 | 41 | 42 | 43 |
u[n] | 1 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
y[n] | 2 | 1 | 0 | 1 | 3 | 3 | 3 | 3 | 1 | 0 | 0 |
n | 44 | 45 | 46 | 47 | 48 | 49 | 50 | 51 | 52 | 53 | 54 |
u[n] | 0 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 |
y[n] | -1 | -1 | -1 | -3 | -3 | -3 | -3 | -3 | -4 | -4 | -5 |
n | 55 | 56 | 57 | 58 | 59 | 60 | 61 | 62 | 63 | 64 | 65 |
u[n] | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 |
y[n] | -6 | -7 | -6 | -4 | -4 | -5 | -5 | -5 | -5 | -4 | -4 |
n | 66 | 67 | 68 | 69 | 70 | 71 | 72 | 73 | 74 | 75 | 76 |
u[n] | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 0 |
y[n] | -2 | -2 | -1 | 0 | 0 | 0 | 2 | 2 | 2 | 1 | 2 |
n | 77 | 78 | 79 | 80 | 81 | 82 | 83 | 84 | 85 | 86 | 87 |
u[n] | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 0 |
y[n] | 2 | 2 | 3 | 2 | 3 | 3 | 2 | 2 | 1 | 2 | 2 |
n | 88 | 89 | 90 | 91 | 92 | 93 | 94 | 95 | 96 | 97 | 98 |
u[n] | 1 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1 |
y[n] | 2 | 0 | 0 | 2 | 2 | 2 | 3 | 3 | 3 | 4 | 4 |
n | 99 | 100 | 101 | 102 | 103 | 104 | 105 | 106 |
u[n] | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 1 |
y[n] | 4 | 2 | 2 | 1 | 1 | 1 | 0 | 1 |
5. УЧЕБНО-МЕТОДИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ДИСЦИПЛИНЫ
5.1. Литература обязательная
1. Юсупов теории идентификации технических объектов. – Л.: Изд-во мин. Обороны, 1974. – 202 с.
2. И Идентификация и диагностика систем. – Томск: Изд-во ТПУ, 2006. – 152 с.; Изд-во ТПУ, 2010. – 156 с.
3. Методы идентификации систем: Пер. с англ. – М.: Мир, 1979. – 304с.
4., Чадеев моделей процессов производства. – М.: Энергия, 1975 – 376 с.
5. , , Яковлев управления: Учеб./СПб.:Изд-во СПбГЭТУ ЛЭТИ, 199с./ Глава «Идентификация объектов управления», 316-410 с.
6. , Солодовников в технических системах управления. Уч. пособие для ВТУЗов/ под ред. .- СПб, 199с.
5.2. Литература дополнительная
7. Идентификация систем: пер. с англ. /Под ред. . - М.: Наука, 19с.
8., , Цирлин определение динамических характеристик промышленных объектов управления. – М.: Энергия, 1967. – 230 с.
9., , Кузин системы автоматического управления сложными технологическими процессами. – М,: - Энергия, 1с.

10. Гудвин Дж. Теория управления. Идентификация и оптимальное управление: пер. с англ. – М.: Мир, 1973 – 248 с.
11. Автоматизированные системы управления технологическими процессами и оптимальное управление /Под. ред. – Харьков: Вища школа,. 1976 – 180 с.
12. Мелса Дж. Идентификация систем управления: пер. с англ. – М.: Наука, 1974 – 248 с.
13. Прикладной регрессионный анализ. : пер. с англ. – М.: Статистика. – 392 с.
14. Валеев моделирование при обработке наблюдений. – М.: Наука, 1991. – 272 с.
15.Автоматизированные системы управления непрерывными технологическими процессами: Учебное пособие / , , / под. Ред. . – Томск: Ротапринт ТПИ, 1987, - 95 с.
16.Дейч идентификации динамических объектов. – М.: Энергия, 1997 – 240 с.
17.Ордынцев описание объектов автоматизации. – М.: Машиностроение, 1965. – 360 с.
18.Солодовников динамика линейных систем автоматического управления. – М.: Физматгиз,. 1960. – 655 с.
19. Регулирование производственных процессов: пер с англ. – М.: Энергия, 1967 – 480 с.
20. , Товарков систем автоматического регулирования котлоагрегатов. – М.: Энергия, 1970. – 280с.
21. Адлер в планирование эксперемента. – М.: Металлургия, 1969. – 159 с.
22. Райбман такое идентификация. – М.: Наука, 1970 – 119 с.
23. , Скрипкин распознавания. – М., 1984. – 208 с.
24. Евланов динамических систем. – М., 1979. –432 с.
25. , , Карасев , обработка и анализ быстропеременных процессов в машинах. – М., 1987. –208 с.
26. Прикладные нечеткие системы: перевод с япон./ К. Асаи, Д. Ватада, С. Иваи и др. М.: Мир, 1993. – 368 с.
ИДЕНТИФИКАЦИЯ И ДИАГНОСТИКА СИСТЕМ
Рабочая программа, методические указания, контрольное задание
Составитель:
Виктор Иванович Коновалов
Рецензент:
, к. т.н., доцент каф. АИКС АВТФ
Подписано к печати
Формат 60х84/ 16. Бумага ксероксная.
Плоская печать. Усл. печ. л. . Уч.-изд. л.
Тираж экз. Заказ. Цена свободная
ИПФ ТПУ. Лицензия ЛТ №1 от 18.07.94.
Типография ТПУ. г. Томск, пр. Ленина, 30.
