

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ
УНИВЕРСИТЕТ имени академика С. П. КОРОЛЕВА» (СГАУ)
Отчет по лабораторной работе №2
по курсу «ТОАУ»
Анализ работы системы управления в пакете моделирования динамических систем Simulink.
Вариант №39.
Выполнила: студентка 643 группы
Проверила:
Самара 2007
Постановка задачи.
Целью данной работы является моделирование работы системы управления в ППП Simulink. Система была разработана в предыдущей лабораторной работе. Моделирование производится путем:
1. Разработки схемы системы управления;
2. Определения реакций системы управления на единичное возмущение по начальным условиям вектора переменных состояния y. Построения графиков;
3. Построения переходной ступенчатой характеристики системы управления;
4. Построения приближенной зависимости максимальной ошибки воспроизведения гармонического сигнала от частоты этого сигнала.
Исходные данные.
Система задана уравнением:
![]() , где
, где
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
1.Разработка схемы системы управления.
Принципиальная схема системы управления приводится на рис.1.
Рис.1 - Схема моделируемой системы управления
Регулятор представляет собой матричный блок усиления с коэффициентами, определенными в первой лабораторной работе. На вход регулятора подается двумерный вектор состояния системы y, а на выходе регулятора выдается управление u. Подсистема “Regulator” изображена на рис.2.
Рис. 2 - Расширенный (Expand) вид для подсистемы регулятора (Regulator)
Подсистема объекта управления реализует интегрирование системы дифференциальных уравнений из первой лабораторной работы. Поэтому она включает в себя следующие блоки из библиотеки Simulink: два матричных усилителя (Gain) для реализации операций B*y и m*u, интегратор (Integrator) для реализации операции интегрирования системы дифференциальных уравнений, в параметрах которого настраиваются начальные условия, для которых нам необходимо получить график на осциллографе, и сумматор (Sum) для реализации операции B*y+m*u. В векторных усилителях, в зависимости от размерности входных векторов устанавливаются матрицы коэффициентов и также порядок перемножения. Для усилителей на данной схеме выставляются матричные коэффициенты соответственно заданию для 1 лабораторной работы (матрица B, m и вектор найденных коэффициентов оптимального управления pt).
Подсистема “Object” изображена на рис.3.
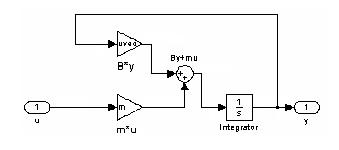
Рис. 3 - Расширенный (Expand) вид для подсистемы объекта (Object)
Далее, согласно заданию, замаскируем подсистемы, спрятав их внутренне представление и предварительно заменив выставляемые коэффициенты (B, m, pt, начальные условия y и т. д.) на переменные и вынеся эти переменные в параметры (Parameters) подсистемы. Таким образом, мы получим маскированные системы объекта управления и регулятора с настраиваемыми параметрами.
2. Реакция системы управления на единичное возмущение.
На рисунке 4 изображена реакция системы управления на единичное возмущение по начальным условиям для вектора y.
3. Построение переходной ступенчатой характеристики системы управления.
Под переходной ступенчатой характеристикой системы управления понимается реакция системы на единичное ступенчатое импульсное возмущение.
Для построения переходной ступенчатой характеристики к системе управления присоединяется блок ступенчатого сигнала (Step), а совместную схему объекта и регулятора несколько видоизменяют для того, чтобы система управления отрабатывала заданную входную функцию ![]() . Тогда измененная система имеет асимптотически устойчивое решение и цель системы управления по отработки заданной функции достигается. На рис.5 приводится схема измененной системы управления.
. Тогда измененная система имеет асимптотически устойчивое решение и цель системы управления по отработки заданной функции достигается. На рис.5 приводится схема измененной системы управления.
Рис. 5.- Схема для построения ступенчатой переходной характеристики системы
Где подсистема Object+Regulator определена, как показано на рисунке 6:
Рис. 6.- Схема подсистемы Object+Regulator
В системе появился дополнительный сигнал x3, который вычитается из исходного сигнала x. В результате чего находится асимптотически устойчивое решение x=x3.
Результаты моделирования работы системы изображены на рисунке 7.
Для построения ступенчатой характеристики, на вход системы ![]() подавалась ступенчатая функция:
подавалась ступенчатая функция:
x3(t)=0, при t<t1,
1, при t>= t1
На рисунке 8 приводится схема измененной системы управления при гармоническом заданном сигнале.
Рис. 8. - Схема для построения приближенного графика максимальной ошибки системы
Переходная характеристика при гармоническом заданном сигнале на рисунке 9.
4. Построение приближенной зависимости максимальной ошибки воспроизведения гармонического сигнала от частоты этого сигнала.
Таблица зависимости максимальной ошибки воспроизведения сигнала от его частоты:
Частота (рад/сек) | Погрешность y1 | Погрешность y2 |
0 | 0 | 0 |
0,1 | 0,0059 | 0,022 |
0,2 | 0,0118 | 0,044 |
0,5 | 0,03 | 0,108 |
1 | 0,059 | 0,213 |
2 | 0,1131 | 0,4043 |
3 | 0,183 | 0,5586 |
5 | 0,38 | 0,75 |
25 | 0,94 | 0,956 |
100 | 0,985 | 0,975 |
График зависимости максимальной ошибки воспроизведения сигнала от его частоты:
Рис. 10.
Вывод.
Моделирование работы динамической системы, полученной в лабораторной работе №1, подтвердило, что она является устойчивой (фазовые координаты стремятся к 0). Было исследовано поведение системы при подаче единичного сигнала (построена переходная ступенчатая характеристика системы управления, при помощи которой обычно определяются различные параметры системы: время регулирования, величина перерегулирования и пр.) и при подаче гармонического заданного сигнала. В последнем случае была изучена зависимость максимальной ошибки воспроизведения от частоты сигнала. В результате оказалось, что, несмотря на большое отличие ошибок по компонентам вектора, их графики оказались близки к линейным. Рисунок 10 показывает, что система приемлемо отрабатывает гармонический сигнал только очень малой частоты. С ростом частоты ошибка достигает своего максимума.
Таким образом, прослеживается четкая закономерность, что с увеличением частоты увеличивается ошибка. Это обуславливается запаздыванием (инертностью) системы. Малые же воздействия система обрабатывает практически сразу, без каких-либо существенных задержек.
