


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 5
1. Эффекты в проводнике вызываемые переменным током.
При протекании в проводнике переменного тока наблюдаются следующие эффекты: а) поверхностный эффект (скин–эффект) и б) эффект близости. Оба эффекта приводят к перераспределению плотности протекающего тока по площади сечения проводника. Эффекты проявляются в независимости от способа возникновения тока в проводнике (подвод контактами или наведенный ток).
1.1 Поверхностный эффект вызывает перераспределение плотности тока таким образом, что плотность тока вблизи поверхности проводника значительно выше чем в середине.
Появление поверхностного эффекта объясняется следующим образом. Переменная электромагнитная волна затухает по мере проникновения в глубь проводящей среды Центр проводника охвачен всеми магнитными линиями, край проводника охвачен только линиями, проходящими вне проводника. Величина реактивной э. д.с. в центре проводника больше, чем на периферии, что приводит к «выдавливанию» основного тока из центра проводника на его периферию. На рис. 1, а показан проводник в магнитном поле, на рис. 1, б представлено распределение плотности тока.
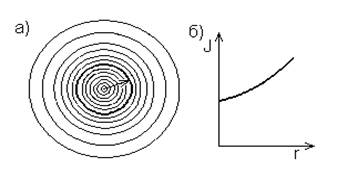
Рис. 1. Поверхностный эффект: J – Плотность тока, r –радиус проводника
Из теории и опыта известно, что величина коэффициента поверхностного эффекта существенно зависит от параметра ![]() , где f – частота переменного тока, R – омическое сопротивление проводника определенной длины, обычно 100 м.
, где f – частота переменного тока, R – омическое сопротивление проводника определенной длины, обычно 100 м.
1.2 Эффект близости наблюдается у близко расположенных проводников и проявляется в перераспределении плотности тока на внутренних и внешних краях проводников. Магнитное поле, создаваемое током одного проводника, наводит в другом проводнике реактивную э. д.с. В результате в последнем возникают токи, стремящиеся ослабить вызвавшие их магнитные потоки.
Это ведет к тому, что при одинаковом направлении токов в проводниках плотность тока будет меньше в частях проводников, обращенных друг к другу (рис. 2).
При разном направлении токов плотность тока будет больше в частях проводников обращенных друг к другу (рис. 3).
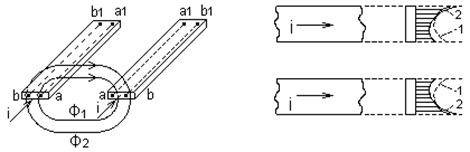
Рис. 2. Распределение плотности тока по сечению проводника при протекании токов одного направления
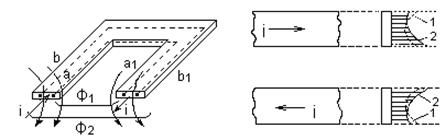
Рис. 3. Распределение плотности тока по сечению проводника при протекании токов разного направления
На рисунках 2 и 3 цифрой «1» обозначено распределение тока в уединенном проводнике, цифрой «2» – распределение тока в близко расположенных проводниках.
1.3 Влияние эффектов на удельное эквивалентное сопротивление проводника
Результатом перераспределения тока, вызванного эффектами, является увеличение эквивалентного удельного сопротивления проводника
rэкв = kп×kб×r0,
где kп – коэффициент поверхностного эффекта, kб – коэффициент эффекта близости (kп ³ 1; kб ³ 1).
Скин-эффект приводит к изменению активного сопротивления провода и его коэффициента самоиндукции
1.4 Способы уменьшения влияния эффектов
В проводах переменный ток при сильном скин–эффекте протекает главным образом по поверхностному слою; при этом сечение провода не используется полностью, сопротивление провода и потери мощности в нём при данном токе возрастают. В ферромагнитных пластинах или лентах магнитопроводов трансформаторов, электрических машин и других устройств переменный магнитный поток при сильном скин–эффекте проходит главным образом по их поверхностному слою; вследствие этого ухудшается использование сечения магнитопровода, возрастают намагничивающий ток и потери в стали. Вредное влияние скин–эффекта ослабляют уменьшением толщины пластин или ленты, а при достаточно высоких частотах — применением магнитопроводов из магнитодиэлектриков. Также для уменьшения поверхностного эффекта целесообразно применять простейшие однослойные обмотки.
Для уменьшения вредного влияния эффекта близости в горизонтальных и магистральных кабелях проводники витых пар выполняются в виде монолитного провода.
Применяется также электромагнитное экранирование.
С целью ослабления поверхностного эффекта и эффекта близости провода выбирают по возможности малого диаметра, а уменьшение площади сечения компенсируют введением параллельных проводников. При больших токах и длительности импульсов применяют провода более экономичного прямоугольного сечения или тонкие и широкие медные шины из фольги, иногда из нескольких слоев, проложенных изоляцией.
2 Переходный режим электропривода с двигателем независимого возбуждения при ослаблении магнитного потока.
 Обычно ДНВ работает при Ф = Фн если U = const или U = var. Необходимость ослабления потока возникает, когда требуется получить скорость, превышающую основную (согласно требованиям технологического процесса). Если бы поток изменялся мгновенно, то в начальный момент времени имел бы место бросок тока и момента, как показано на рисунках w = f(Ia) и w=f(M) пунктиром. В действительности Ф изменяется во времени. Поэтому ток якоря и момент двигателя будут изменяться по так называемым динамическим характеристикам (кривая 1). При небольших
Обычно ДНВ работает при Ф = Фн если U = const или U = var. Необходимость ослабления потока возникает, когда требуется получить скорость, превышающую основную (согласно требованиям технологического процесса). Если бы поток изменялся мгновенно, то в начальный момент времени имел бы место бросок тока и момента, как показано на рисунках w = f(Ia) и w=f(M) пунктиром. В действительности Ф изменяется во времени. Поэтому ток якоря и момент двигателя будут изменяться по так называемым динамическим характеристикам (кривая 1). При небольших  пределах изменения Ф можно считать, что Ф изменяется по линейному закону, как показано на графике кривой намагничивания. Линейное изменение потока имеет место в случае, если
пределах изменения Ф можно считать, что Ф изменяется по линейному закону, как показано на графике кривой намагничивания. Линейное изменение потока имеет место в случае, если ![]() , т. е. когда цепь машины не насыщена (здесь допускается некоторая погрешность). Закон изменения тока возбуждения при ненасыщенной магнитной цепи можно найти из уравнения равновесия ЭДС для цепи возбуждения
, т. е. когда цепь машины не насыщена (здесь допускается некоторая погрешность). Закон изменения тока возбуждения при ненасыщенной магнитной цепи можно найти из уравнения равновесия ЭДС для цепи возбуждения  .
.
Отсюда ![]() , где
, где ![]() .
.
При ![]() закон изменения потока будет таким же
закон изменения потока будет таким же ![]() .- это экспонента.
.- это экспонента.
 Для расчета строится кривая j = f(t) и разбивается на участки постоянной длительности. На каждом участке длительностью Dt поток j считается постоянным, равным среднему значению
Для расчета строится кривая j = f(t) и разбивается на участки постоянной длительности. На каждом участке длительностью Dt поток j считается постоянным, равным среднему значению  . Аналогично скорость двигателя в течении Dt считаем постоянной и равной среднему значению
. Аналогично скорость двигателя в течении Dt считаем постоянной и равной среднему значению ![]()
Получаем расчетную формулу:
 .
.
 Расчет кривой скорости ведется с первого участка длительностью Dt, для которого известна
Расчет кривой скорости ведется с первого участка длительностью Dt, для которого известна ![]() и среднее значение потока
и среднее значение потока ![]() . Приращение скорости на первом участке
. Приращение скорости на первом участке  .
.
Начальная скорость на втором участке длительностью Dt равна скорости в конце первого участка, т. е.  . Аналогично определяется приращение скорости на втором участке и т. д. По рассчитанным приращениям строится кривая n = f(t), которая изображена на графике.
. Аналогично определяется приращение скорости на втором участке и т. д. По рассчитанным приращениям строится кривая n = f(t), которая изображена на графике.
Для нахождения закона изменения тока IЯ в переходном режиме воспользуемся формулой:
,
![]() .
.
Конечное значение тока якоря  .
.
Поскольку значения j и n для каждого участка длительностью Dt известны, можно построить кривую IЯ = f(t). Примерный вид этой кривой при Мc = const приведен на рис.
Закон изменения момента находится аналогично согласно уравнению движения
![]()
Если бросок тока при ослаблении Ф окажется недопустимым по условиям коммутации, изменение Ф следует осуществлять в несколько ступеней.
3 Классификация СУЭП. Координаты СУЭП. Параметры СУЭП. Задачи исследования и проектирования СУЭП.
СУ ЭП можно классифицировать по ряду основных признаков:
1. По степени автоматизации функций управления:
- системы ручного управления (человек-оператор вырабатывает и реализует стратегию управления);
- системы автоматизированного управления (человеко-машинные СУ ЭП);
- системы автоматического управления СУ ЭП (без участия человека);
2. По характеру протекания процессов в СУ ЭП и, соответственно, форме математического описания:
- непрерывные (аналоговые) СУ ЭП;
- дискретные (релейные, импульсные, цифровые) СУ ЭП;
- дискретно-непрерывные, в том числе цифро-аналоговые СУ ЭП.
3. По наличию существенных нелинейностей в СУ ЭП:
- линейные (линеаризованные) СУ ЭП;
- нелинейные СУ ЭП.
4. По типу обратных связей:
- разомкнутые (без обратных связей) СУ ЭП;
- замкнутые СУ ЭП:
- по ошибке регулирования (с регулированием по отклонению выходной координаты от заданного значения);
- по вектору состояния ОУ (полному или редуцированному);
- по вектору возмущающих воздействий ОУ (с регулированием по возмущению);
- замкнутые по векторам состояния и возмущающих воздействий (с комбинированным управлением).
5.По принципу управления (характеру задач управления):
- системы стабилизации какой-либо координаты ОУ;
- системы программного управления;
- следящие системы и системы воспроизведения движений.
6.По числу и связности каналов управления:
- одномерные СУ ЭП (со скалярным управлением);
- многомерные СУ ЭП с автономными (невзаимосвязанными) каналами управления (с субвекторным управлением);
- многомерные многосвязные СУ ЭП (с векторным управлением).
Этот классификационный признак СУ ЭП определяется характером взаимодействия электродвигателей и механической системы ОУ. При этом различают 3 типа электропривода (ЭП): индивидуальный, групповой и взаимосвязанный ЭП.
7. По способу преобразования подводимой энергии:
- СУ ЭП без силового преобразователя (с непосредственной коммутацией электродвигателя к промышленной электросети);
- СУ ЭП с силовым преобразователем энергии (с электромашинным, тиристорным, транзисторным и др.).
8. По типу регулируемой локальной координаты:
- система регулирования линейной или угловой скорости механизма или соотношения скоростей механических подсистем;
- система регулирования линейного или углового перемещения рабочего органа механизма;
- система регулирования нагрузки на валу механизма;
- система регулирования натяжения нити, полотна, ленты, проволоки и т. п.;
- система регулирования температуры, давления, расхода, уровня и др. технологических координат.
9. По типу регуляторов, применяемых в устройстве управления:
- с регуляторами класса “вход-выход”;
- с регуляторами состояния.
10. По типу элементной базы устройства управления:
- на основе операционных усилителей в интегральном исполнении;
- на основе логических (комбинационных и последовательностных) интегральных микросхем малой и средней степени интеграции;
- на основе унифицированных блочных систем регуляторов типа УБСР-АИ, УБСР-ДИ и т. п.;
- на основе микропроцессорных комплектов БИС, промышленных микро-ЭВМ, микропроцессорных контроллеров, микропроцессорных комплексов технических средств управления и др.
Координатами в СУ ЭП являются контролируемые или регулируемые величины (параметры ОУ) в электрической или физической форме.
Входными координатами СУ ЭП – координатами состояния ОУ могут быть: напряжения, токи, частота силового питающего напряжения, скорость вращения вала двигателя и ИМ и др.
Выходными технологическими координатами ОУ могут быть: давление газа или жидкости в магистрали, расход газа или жидкости, натяжение нити или полотна, уровень нефти в резервуаре и др. В чисто электромеханических системах управления (ЭМСУ) выходной координатой являются скорость или положение ИМ и РО.
Координатами возмущения ОУ могут быть: отклонения напряжения и частоты питающей среды от номинальных значений, изменения климатических факторов, изменения нагрузки на валу ЭП и т. п.
Параметры СУ ЭП определяют то или иное свойство системы: регуляторов, силовых преобразователей, электродвигателей, исполнительных механизмов, регулирующих органов.
К основным задачам исследования СУ ЭП относят:
– определение адекватной объекту управления (ОУ) его математической модели (ММ);
– формулирование цели управления, т. е. критериев качества управления:
а) Быстродействие регулирования;
б) Точность;
в) Прямые оценки качества регулирования координат электропривода (время регулирования, время первого согласования, перерегулирование, временное запаздывание отработки задающего или возмущающего воздействия и т. п.).
г) Другие критерии: минимаксный, экономический, энергетический и т. д.
– синтез структуры СУ ЭП (задача структурного синтеза СУ ЭП), т. е. установление оптимальных (рациональных) элементов устройства управления и взаимосвязей между ними;
– синтез параметров СУ ЭП (задача параметрического синтеза СУ ЭП), т. е. определение оптимальных (рациональных) параметров устройства управления.
– Анализ синтезированной СУ ЭП:
а) определение ММ СУ ЭП, отражающей ее доминирующие свойства (качества);
б) оценка устойчивости и (или) показателей качества СУ ЭП при заданных аддитивных воздействиях на нее;
в) оценка чувствительности СУ ЭП к вариациям ее параметров;
г) оценка экономической, эксплуатационной эффективности СУ ЭП, показателей надежности и др.
Стадии проектирования СУЭП регламентированные ГОСТом:
- Техническое задание (ТЗ) разрабатывают на основе исходных требований заказчика, изложенных в заявке, а также на основе результатов выполненных научно-исследовательских и экспериментальных работ, научного прогнозирования, изучения патентной документации на компоненты и системы автоматизации, а на продукцию, предназначенную для экспорта, с учетом внешнего рынка.
При разработке ТЗ выделяется ряд этапов:
1. Обследование технологического объекта управления (объекта управления), изучение и определение необходимого объема научно-исследовательских работ (НИР) и плана-графика проведения этих исследований.
2. Этап выполнения предпроектных НИР. Они включают анализ объекта управления и анализ информационных потоков: на этой основе формулируются критерии управления и ограничения.
- Стадия технического предложения.
Здесь инициатором является Разработчик. Это стадия собственно разработки технического задания, которая включает в себя: формирование полного перечня функциональных задач, решаемых системой; разработку технико-экономического обоснования ее создания; составление плана-графика работ по монтажу, наладке и пуску; виды и объемы НИР на стадиях проектирования, внедрения системы и в процессе ее функционирования.
- Техническое предложение - это совокупность конструкторских документов, которые должны содержать технические и технико-экономические обоснования целесообразности разработки документации изделия на основании анализа технического задания заказчика и различных вариантов возможных решений изделия, сравнительной оценки решений с учетом конструктивных и эксплуатационных особенностей разрабатываемого изделия и патентные исследования.
- Стадия эскизной разработки.
Она содержит: предварительные разработки функциональной структуры системы, синтез основных алгоритмов контроля и управления и их экспериментальную проверку.
Эскизный проект - это совокупность конструкторских документов, которые должны содержать принципиальные конструктивные решения, дающие общее представление об устройстве и принципе работы изделия, а также данные, определяющие назначение, основные параметры и габаритные размеры разрабатываемого изделия.
- Стадия технического проектирования.
Она состоит из следующих этапов:
1. Системотехнический синтез системы.
2. Аппаратурно-технический синтез. На этом этапе разрабатываются системы локальной автоматики, состав и компоновка информационно-управляющего комплекса.
3. Разработка заданий на модернизацию технологического объекта управления и строительно-монтажные работы.
4. Составление сметы и ведомостей средств технического обеспечения. Расчет ожидаемой технико-экономической эффективности системы и ее сравнительный анализ с известными аналогами.
5. Заключительным этапом стадии технического проекта является техническое проектирование специального информационного и математического обеспечения.
- Стадия разработки рабочей конструкторской документации.
Рабочая конструкторская документация - это совокупность конструкторских документов, которые предназначены для изготовления и испытания опытного образца изделия, изготовления и испытания установочной серии.
Стадия разработки рабочей конструкторской документации осуществляется на основании материалов технического проекта и состоит из нескольких этапов:
1. Основным является этап разработки рабочей документации технического обеспечения системы.
2. Составление заказных спецификаций; подготовка инструкции по эксплуатации, технического описания и регламента работы системы с учетом действия оперативного персонала в предаварийных и аварийных режимах.
3. Разработка рабочей документации на программное и информационное обеспечение системы (этот этап может идти параллельно с предыдущими). Рабочая документация на деталь (элемент СУ ЭП) обязательно содержит чертеж детали, а также могут быть чертежи теоретический, габаритный, упаковочный, технические условия и другие документы.
БИЛЕТ № 6
1. Электромеханические реле автоматики.
1.1 Общие характеристики
К релейным элементам автоматики (реле) относятся устройства, преобразующие плавное изменение входной величины в скачкообразное изменение выходной.
При непрерывном возрастании входной величины X до значения Xср, происходит срабатывание реле и скачкообразное изменение выходного параметра Y, от Y = 0 (или Y = Ymin) до Y = Ymax, которое не изменяется при дальнейшем увеличении входного параметра X. При уменьшении входной величины X до Xотп = Xср – DX, при котором реле отпускает, происходит обратное скачкообразное изменение величины выходного параметра Y от Ymax до 0 (или Ymin), которое остается неизменным при дальнейшем уменьшении параметра X, рис.6.1.
Рис. 6.1 Релейная характеристика
Реле – слаботочные аппараты. В зависимости от характера сигнала, подаваемого на измерительный орган, и выполняемой функции реле подразделяются на следующие виды:
- токовые реле – реагируют на величину тока, протекающего по обмотке;
- максимальные токовые реле – срабатывают при поступлении тока в обмотку больше заданного (тока уставки реле);
- реле максимального напряжения – срабатывают при превышении напряжением заданного значения;
- реле минимального напряжения – срабатывают при снижении напряжения ниже заданного значения;
- реле мощности – реагирует на величину мощности, которая фиксируется его измерительным органом;
- реле времени – создают выдержку времени в широких пределах (в зависимости от конструкции);
- реле направления энергии – реагирует на изменение потока мощности;
- реле сопротивления (реактивного или полного) – способны измерять сопротивление от места установки реле до точки повреждения в сети, пропорциональное дистанции между ними;
- дифференциальное реле – реагирует на разность двух параметров, например токов;
- промежуточные (коммутационные) реле – контакты таких реле коммутируют токи, значительно превышающие токи управления реле, обычно бывают многоцепными, имеющими много пар коммутирующих контактов.
Чувствительность реле – характеризуется минимальным параметром срабатывания. Чувствительность можно характеризовать также минимальной мощностью обмотки, потребляемой при срабатывании
![]() ,
,
где Iср. min – минимальный ток срабатывания, R – сопротивление обмотки.
Мощность контактов реле, или коммутируемая мощность, характеризуется произведением максимального отключаемого тока на напряжение на разомкнутых контактах. Реле подразделяются на классы в зависимости от времени срабатывания tсраб, с:
сверхбыстродействующие реле tсраб £ 0.001 с;
быстродействующие реле tсраб £ 0.05 с;
нормальные реле tсраб » 0.15 с.
Коэффициент возврата – отношение параметра отпускания реле к параметру срабатывания, например для токового реле
KВ = Iотп / Iсраб
Коэффициент запаса – отношение намагничивающей силы обмотки при рабочем токе к намагничивающей силе при токе срабатывания электромагнита, характеризует надежность работы реле:
KЗАП = (Iw) раб / (Iw)сраб. (6.1)
Чем больше КЗАП, тем менее экономично реле.
1.2 Электромагнитные реле.
Электромагнитные реле приводятся в действие электромагнитами постоянного и переменного тока. Наиболее часто на электромагнитном принципе выполняются токовые и промежуточные реле. Обмотки промежуточных реле включаются на полное напряжение, так называемые параллельные или шунтовые обмотки, такие обмотки имеют сравнительно высокое сопротивление (до сотен и тысяч Ом). Обмотки токовых реле включаются последовательно с основным сопротивлением нагрузки, такие обмотки называются последовательными или сериесными. Они должны иметь сопротивление значительно ниже сопротивления той цепи, куда они включаются.
Дистанционные переключатели аналогичны, по принципу действия, электромагнитным реле. Они имеют два спаренных электромагнита с автономными катушками на каждом из них. При подаче напряжения на одну из них происходит переключение в одно положение, при подаче на другую – в другое. Поэтому фиксация якоря электромагнита происходит при обесточенной катушке.
В автоматике часто приходится выбирать одну цепь из нескольких возможных. Для этого служат шаговые искатели, которые последовательно переключают ряд цепей до нахождения искомой.
1.3 Магнитоуправляемые контакты (герконы).
Контакты обычных реле находятся в среде атмосферного воздуха. Они загрязняются пылью, парами металлов, покрываются окислами, возникающими при химических реакциях под воздействием электрической дуги, подвергаются воздействию различных агрессивных атмосферных газов, водяных паров.
От указанных недостатков свободны герметические магнитоуправляемые контакты – герконы, контакты которых помещены в среду инертного газа или вакуум.
Геркон представляет собой стеклянную капсулу с впаянными токоведущими, ферромагнитными, пружинящими пластинками. Магнитный поток, созданный намотанной снаружи капсулы катушкой или постоянным магнитом, замыкается через пластины и создает электромагнитную силу притяжения в воздушном зазоре между концами пластин. Таким образом, в герконах контактный зазор является и рабочим воздушным зазором, а пластинчатые пружины проводят магнитный поток и электрический ток.
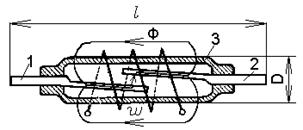
Рис. 6.3 Геркон
В стеклянную капсулу 3, заполненную инертным газом, впаяны токоведущие пружинящие ферромагнитные пластинки 1 и 2. Магнитный поток F, созданный током в катушке w, намотанной снаружи капсулы 3, проходит по пластинам 1 и 2 и создает электромагнитную силу притяжения в воздушном зазоре между концами пластин. Пластины 1 и 2 смыкаются и образуют цепь тока. При снятии тока в катушке, пластины размыкаются под действием их упругих сил.
Переключающий геркон с ферромагнитным шариком и двумя катушками изображен на рис. 6.4.
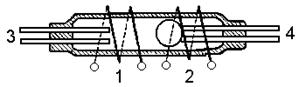
Рис. 6.4 Переключающий геркон
При подаче тока в управляющую катушку 2 шарик электромагнитной силой притягивается к контактным выводам 4 и замыкает их. Если подать ток в катушку 1, то замыкаются контакты 3.
Поляризованный геркон – с постоянным магнитом представлен на рис. 6.5.
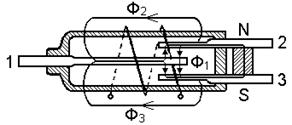
Рис. 6.5 Поляризованный геркон
Постоянный магнит NS создает поток Ф1 в контактных зазорах. Создаваемый управляющей катушкой магнитный поток, пройдя по пластине 1, разветвляется в контактном зазоре на две части: Ф2 и Ф3. В верхнем зазоре действует разность потоков (Ф1-Ф2), в нижнем – сумма (Ф1+ Ф3). Поэтому пластинка 1 притянется к пластинке 3, и замкнутся нижние контакты. Если направление тока в катушке изменить на обратное, то произойдет замыкание верхних контактов 1-2. Следовательно, геркон такой конструкции реагирует на направление тока в катушке, т. е. является поляризованным
Контактный зазор составляет десятые доли миллиметра, контакты покрываются благородными металлами (платина, золото, серебро и т. п.). Этот контактный слой из немагнитных металлов является «немагнитной прокладкой», которая предотвращает залипание контактов от остаточного магнитного потока.
Феррид – разновидность геркона, обладающая «памятью», рис. 6.6. Для срабатывания замыкающих контактов следует подать ток в управляющую катушку одной полярности. для размыкания – другой (размагничивающий импульс тока). За счет чего уменьшается энергия, потребляемая катушками управления по сравнению с обычными герконами, в которых ток протекает через катушку в течение всего периода их включенного состояния.
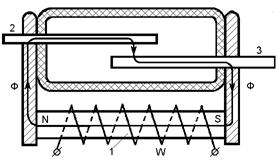
Рис. 6.6 Устройство феррида
Сердечник 1, на котором намотана катушка w, должен иметь очень высокое сопротивление, для обеспечения разрыва цепи при разомкнутых контактах 2 и 3. В то же время он должен быть ферромагнитным. Такими свойствами обладают ферриты, имеющие удельное электрическое сопротивление примерно в миллион раз выше, чем у обычных сталей. Кроме того, сердечник должен обладать свойством устойчивого остаточного намагничивания. Импульс тока в катушке w создает магнитный поток Ф, в результате чего замкнутся контакты геркона и намагнитится сердечник 1. После снятия импульса тока контакты остаются замкнутыми за счет потока от намагниченного сердечника 1. Для размыкания контактов следует подать в катушку размагничивающий импульс тока обратной полярности.
1.3 Поляризованные реле
Особенности: быстродействие, высокая чувствительность, способность реагировать на направление тока в обмотке управления. Достигается включением постоянного (поляризующего) магнита в магнитную цепь.
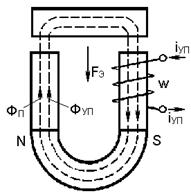
Рис. 6.7 Поляризованное реле
На рис. 6.7 представлено поляризованное реле с последовательной магнитной цепью. Магнитный поток от постоянного магнита ФП направлен согласно с потоком ФУП, создаваемым током управления iУП в катушке w.
На рис. 6.8 представлены кривые нарастания тока для обычного и поляризованного реле.
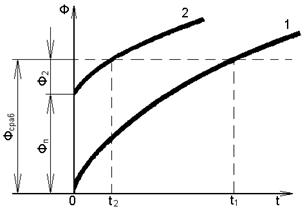
Рис. 6.8 Кривые нарастания тока
При отсутствии постоянного магнита изменение магнитного потока, после подачи напряжения на катушку, показывает кривая 1, для достижения потока срабатывания (ФСРАБ) должно пройти время t1.Ток срабатывания (при RСТ = 0) определяется из соотношения: I1×w = ФСРАБ×Rd
![]()
![]() (6.2)
(6.2)
Изменение магнитного потока при наличии постоянного магнита показывает кривая 2. Время срабатывания значительно меньше, а ток срабатывания определяется следующей формулой:
 (6.3)
(6.3)
В поляризованных реле возможны несколько вариантов настройки положения якоря (рис. 6.9), что достигается разной установкой упоров.
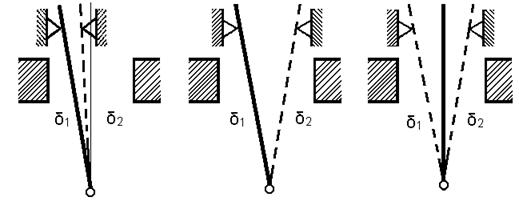
Рис. 6.9 Настройка якоря поляризованного реле
В двухпозиционном реле с преобладанием (рис. 6.9 слева) якорь находится в одном положении, если ток в обмотке управления отсутствует. Якорь перемещается в другое крайнее положение лишь при определенном направлении тока, при исчезновении которого якорь возвращается в исходное положение.
В двухпозиционном реле без преобладания (рис. 6.9 в центре) при отсутствии тока в обмотке якорь занимает одно из двух крайних положений в зависимости от направления тока в предшествующем включении. Переключение якоря достигается включением тока противоположному по направлению тому, которое было в предшествующем включении.
В трехпозиционном реле (рис. 6.9 справа) якорь, под действием силы пружины, занимает нейтральное среднее положение, когда ток в обмотке управления отсутствует. Ток одного направления вызывает перемещение якоря в одно крайнее положение, ток другого направления перемещает в другое.
2. Опыты холостого хода и короткого замыкания трансформатора. Пояснить цель их проведения.
Все рабочие свойства (нагрузочные характеристики) трансформатора могут быть определены по данным опытов холостого хода и короткого замыкания.
По данным опытов холостого хода и короткого замыкания можно определить значение к. п.д. трансформатора при любой нагрузке по приведенной формуле
![]()
Из опыта х. х. определяем P0н ← Uн – потери в стали
Pкн ← Iн – потери в обмотках
 .
.
 – коэффициент загрузки трансформатора в долях от номинального тока.
– коэффициент загрузки трансформатора в долях от номинального тока.
Задаваясь b = 0,25; 0,5; 0.75; 1.0; 1.25 при
cosj2 = const построим зависимость h = f(b)
Максимум h наступает тогда, когда потери в стали равны потерям в меди.
 , из формулы видно, что DU зависит как от величины, так и от характера нагрузки. Кроме того, видим, что для определения DU используются данные, полученные из опыта короткого замыкания.
, из формулы видно, что DU зависит как от величины, так и от характера нагрузки. Кроме того, видим, что для определения DU используются данные, полученные из опыта короткого замыкания.
 Используя это выражение, можно получить ряд характеристик при нагрузке:
Используя это выражение, можно получить ряд характеристик при нагрузке:
Изменение вторичного напряжения при любой нагрузке в процентах от его значения определяют по формуле:

Напряжение вторичной обмотки при нагрузке определяется по формуле:
![]()
![]() %
%
где U2н – вторичное напряжение при холостом ходе.
3. Статика и динамика СУЭП (требования к СУЭП в статических и динамических режимах; статические и динамические установившиеся ошибки регулирования; коэффициенты ошибок регулирования по положению, скорости и ускорению; свободные и вынужденные динамические процессы в СУЭП).
Основными требованиями к СУЭП в статике и динамике могут быть:
- малая установившаяся ошибка регулирования, т. е. высокая точность;
- малая длительность переходных процессов, т. е. высокое быстродействие;
- малая колебательность переходных процессов, т. е. высокая плавность их протекания.
Статические режимы СУ ЭП характеризуются установившимися состояниями при неизменных входных воздействиях. Уравнения статики легко получить из уравнений динамики СУ ЭП, приравняв в них нулю все производные по времени переменных (координат состояния) и внешних воздействий. В операторных уравнениях и структурных схемах линейных САУ это эквивалентно приравниванию нулю оператора p. Таким образом, статическая характеристика системы – это зависимость выходной переменной от какой-либо входной переменной в статическом (установившемся) режиме.
Статическая установившаяся ошибка регулирования в общем случае изменения задающих или возмущающих воздействий линейной СУ ЭП.
 . (5.2)
. (5.2)
 |
Рис. 5.2. Структурная схема замкнутого контура регулирования
Отсюда изображение ошибки регулирования в системе
 , (5.3)
, (5.3)
а передаточная функция по ошибке
 .
.
Ошибка регулирования будет стремиться к нулю при X = const, если ![]() , что предполагает реализацию бесконечно большого усиления в устройстве управления и может привести к неустойчивости системы. Кроме того, реальные динамические звенья обладают конечными коэффициентами усиления, что приводит к возникновению ненулевой статической ошибки регулирования.
, что предполагает реализацию бесконечно большого усиления в устройстве управления и может привести к неустойчивости системы. Кроме того, реальные динамические звенья обладают конечными коэффициентами усиления, что приводит к возникновению ненулевой статической ошибки регулирования.
Между тем, статическая ошибка регулирования в системе при неизменном входном воздействии может быть сведена к нулю, если сделать равной нулю передаточную функцию ошибки  по задающему (возмущающему) воздействию при p=0. Для этого достаточно в прямой или обратный канал регулирования системы ввести интегрирующее звено. На практике интегрирующее звено вводят в структуру устройства управления, применяя И-, ПИ-, ПИД-регуляторы. Это обеспечивает
по задающему (возмущающему) воздействию при p=0. Для этого достаточно в прямой или обратный канал регулирования системы ввести интегрирующее звено. На практике интегрирующее звено вводят в структуру устройства управления, применяя И-, ПИ-, ПИД-регуляторы. Это обеспечивает  и, тем самым, нулевую статическую ошибку регулирования. Такие системы принято называть астатическими нулевого порядка по задающему или (и) возмущаещему воздействию. Для придания системе астатизма более высокого порядка в структуру регулятора вводят соответствующее число интеграторов.
и, тем самым, нулевую статическую ошибку регулирования. Такие системы принято называть астатическими нулевого порядка по задающему или (и) возмущаещему воздействию. Для придания системе астатизма более высокого порядка в структуру регулятора вводят соответствующее число интеграторов.
Динамическая установившаяся ошибка регулирования является реакцией на гармоническое воздействие, возникает и измеряется в процессе регулирования.
Коэффициенты ошибок регулирования по положению, скорости и ускорению
Величина установившейся ошибки регулирования, наличие и порядок астатизма замкнутой САУ определяются не только ее моделью, но и видом входного сигнала.
Поскольку в качестве типовых тестовых сигналов применяют ступенчатое, линейное и квадратичное входное воздействие, то для оценки установившихся ошибок в системе выделяют 3 типа коэффициентов ошибок:
1) коэффициент ошибки по положению (i = 0)
![]() ; (5.7)
; (5.7)
2) коэффициент ошибки по скорости (i = 1)
![]() ; (5.8)
; (5.8)
3) коэффициент ошибки по ускорению (i = 2)
![]() . (5.9)
. (5.9)
Установившиеся ошибки СУ ЭП могут иметь нулевое, бесконечное или постоянное значение в зависимости от числа интеграторов в передаточной функции W1(p) и типа входного сигнала. Установившиеся ошибки для трех типов входных воздействий и трех типов передаточной функции W1(p) – с отсутствием интеграторов, с одним и с двумя интеграторами – приведены в табл. 5.1.
Табл. 5.1
Число интеграторов | Входной сигнал | ||
Ступенчатый
| Линейный
| Квадратичный
| |
0 |
|
|
|
1 |
|
|
|
2 |
|
|
|
Свободные и вынужденные переходные процессы
Динамические режимы СУ ЭП характеризуются переходными состояниями системы при изменении входных (задающих и (или) возмущающих) воздействий. При этом различают свободные и вынужденные переходные процессы.
Назовем процесс вынужденным, если промежуток времени между моментом tз (tв) приложения задающего (возмущающего) воздействия X(t) и моментом наблюдения выходной величины Y(t) равен бесконечности. В дальнейшем будем полагать моменты времени приложения воздействий равными нулю. Тогда процесс изменения выходной величины Y(t)
 , (5.10) где
, (5.10) где ![]() -импульсная переходная функция по задающему (возмущающему) воздействию.
-импульсная переходная функция по задающему (возмущающему) воздействию.
Свободный (собственный) процесс в системе определяется решением однородного дифференциального уравнения, описывающего САУ, протекает под действием ненулевых начальных условий Y(t0) и в устойчивых системах асимптотически затухает:
![]() , (5.11)
, (5.11)
где ![]() – матрица перехода системы из начального состояния Y(t0) в текущее состояние Y(t).
– матрица перехода системы из начального состояния Y(t0) в текущее состояние Y(t).
Полное решение уравнения движения линейных СУ ЭП представляет собой сумму решений уравнений свободного и вынужденного движений.
В качестве примера на рис. 5.3 приведена реакция электродвигателя постоянного тока (полное решение уравнения движения) на ступенчатое приложение номинальной нагрузки Mсн к его валу (возмущающего воздействия).
При приложении нагрузки скорость ![]() двигателя падает, причем имеет место колебательный процесс. Максимальный динамический провал скорости
двигателя падает, причем имеет место колебательный процесс. Максимальный динамический провал скорости ![]() превышает статическое падение скорости
превышает статическое падение скорости ![]() (см. рис. 5.1).
(см. рис. 5.1).
Рис. 5.3. Реакция электродвигателя постоянного тока на возмущающее воздействие в виде ступени номинальной нагрузки на валу
Вынужденное движение соответствует новому установившемуся состоянию - номинальной скорости ![]() электродвигателя. Время переходного процесса (перехода в новое установившееся состояние) составляет tрег.
электродвигателя. Время переходного процесса (перехода в новое установившееся состояние) составляет tрег.
Свободное движение системы из заданного начального состояния представляет собой “свободный выбег” электродвигателя за время, соответствующее переходу вектора состояния системы в нулевое установившееся состояние.
Если известно в момент времени t = 0 начальное состояние X(0) объекта управления и вектор управляющих воздействий U(0) (призванный оптимизировать движение системы), то уравнение движения системы во времени t (здесь и далее полагается, что возмущения F(t), действующие на систему, равны нулю) определяется выражением [2]:
 .
.
