
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() .
.
![]() А/м - напряженность магнитного поля в зубцах статора т. к. Bz=2,1Тл (при высоте оси вращения h ≤ 250 мм применяется сталь 2013)
А/м - напряженность магнитного поля в зубцах статора т. к. Bz=2,1Тл (при высоте оси вращения h ≤ 250 мм применяется сталь 2013)
6.4 Магнитное напряжение зубцового слоя ротора (А)
![]() ,
,
![]() .
.
![]() А/м, - напряженность магнитного поля в зубцах ротора определяется по приложению А для индукции Bz=1.7 Тл.
А/м, - напряженность магнитного поля в зубцах ротора определяется по приложению А для индукции Bz=1.7 Тл.
6.5 Магнитное напряжение ярма статора:
![]() ,
,
![]() .
.
![]() =542 А/м определяется по приложению Б для индукции Bа1=1,5Тл.
=542 А/м определяется по приложению Б для индукции Bа1=1,5Тл.
6.6 Магнитное напряжение ярма ротора (А)
![]() ,
,
![]() .
.
![]() А/м определяется по приложению Б для индукции Bа2=1,5Тл
А/м определяется по приложению Б для индукции Bа2=1,5Тл
6.7 Суммарное магнитное напряжение магнитной цепи
![]() .
.
6.8 Коэффициент насыщения магнитной цепи двигателя
![]() , (
, (![]() ).
).
6.9 Намагничивающий ток (А)
![]() ,
,
а в процентах от номинального тока статора
![]() .
.
7 Активные и индуктивные сопротивления обмоток статора и ротора
А. Сопротивление обмотки статора
7.1 Среднее значение зубцового деления статора (м)
![]() .
.
7.2 Средняя ширина катушки (секции) статора (м)
![]() ,
,
где ![]() =
= ![]() = 9 - среднее значение шага обмотки статора.
= 9 - среднее значение шага обмотки статора.
7.3 Средняя длина лобовой части статора (м) для обмотки с мягкими катушками
![]() .
.
7.4 Средняя длина витка обмотки статора (м)
![]() м.
м.
7.5 Длина вылета лобовой части обмотки статора для обмотки с мягкими катушками (м)
![]()
7.6 Активное сопротивление обмотки статора, приведенное к рабочей температуре 1150 С (для класса изоляции F), в Ом
![]() ,
,
где ![]()
7.7 Активное сопротивление обмотки статора в относительных единицах (о. е.)
![]() о. е.
о. е.
7.8 Индуктивное сопротивление рассеяния обмотки статора состоит из трех частей: пазового рассеяния, дифференциального рассеяния и рассеяния лобовых частей.
Коэффициент магнитной проводимости пазового рассеяния статора при трапециадальном пазе
![]() и
и ![]() ,
,
![]() ,
,
![]() ;
;

![]() .
.
7.9 Коэффициент проводимости дифференциального рассеяния статора
![]() ,
,
где ![]() определяется из графика,
определяется из графика,![]()
7.10 Коэффициент проводимости рассеяния лобовых частей обмотки статора
![]()
7.11 Коэффициент магнитной проводимости рассеяния обмотки статора
![]()
7.12 Индуктивное сопротивление рассеяния фазы обмотки статора (Ом)
![]()
7.13 Индуктивное сопротивление в относительных единицах
![]() о. е.
о. е.
В. Сопротивление обмотки ротора
7.14 Среднее значение зубцового деления ротора (м)
![]()
7.15 Средняя ширина катушки обмотки ротора (м)
![]() м,
м,
где![]()
7.16 Средняя длина лобовой части катушки (м)
![]() ,
,
где ![]() мм.
мм.
 .
.
7.17 Средняя длина витка обмотки ротора (м)
![]() .
.
7.18 Вылет лобовой части обмотки ротора (м)
![]() .
.
7.19 Активное сопротивление обмотки фазы ротора (Ом)
![]() .
.
7.20 Коэффициент приведения сопротивления обмотки ротора к обмотке статора
 .
.
7.21 Активное сопротивление обмотки ротора, приведенное к статору (Ом)
![]() .
.
то же в относительных единицах
![]() о. е.
о. е.
7.22 Коэффициент магнитной проводимости пазового рассеяния ротора при прямоугольном пазе
![]() ,
,
![]() ,
,

![]() ,
,
где ![]() и
и ![]() .
.
7.23 Коэффициент проводимости дифференциального рассеяния ротора
![]() ,
,
где ![]() определяется из графика,
определяется из графика,![]() .
.
7.24 Коэффициент проводимости рассеяния лобовых частей обмотки ротора
![]() .
.
7.25 Коэффициент проводимости рассеяния обмоток
![]() .
.
7.26 Индуктивное сопротивление обмотки фазы ротора (Ом)
![]() .
.
7.27 Индуктивное приведенное сопротивление обмотки фазы ротора (Ом)
![]() .
.
7.28 Индуктивное приведенное сопротивление обмотки фазы ротора (о. е.)
![]() о. е.
о. е.
8 Потери в стали, механические и добавочные потери
Потери в стали (магнитные потери) и механические не зависят от нагрузки, поэтому они называются постоянными потерями и могут быть определены до расчета рабочих характеристик.
8.1 Расчетная масса стали зубцов статора при трапециадальных пазах (кг)
![]() .
.
8.2 Магнитные потери в зубцах статора для стали 2013 (Вт)
![]() ,
,
для трапециадальных пазов -  .
.
8.3 Масса стали ярма статора
![]()
8.4 Магнитные потери в ярме статора для стали 2013 (Вт)
![]() .
.
8.5 Суммарные магнитные потери в сердечнике статора, включающие добавочные потери в стали (Вт)
![]()
8.6 Механические потери (Вт) при степени защиты IP44

8.7 Дополнительные потери (Вт) при номинальной нагрузке
![]()
9 Рабочие характеристики асинхронного двигателя
Рабочими характеристиками асинхронного двигателя называются зависимости
![]() .
.
9.1 Сопротивление взаимной индукции обмоток статора и ротора (Ом)
![]() .
.
9.2 Коэффициент приведения параметров Т – образной схемы замещения к Г – образной
![]() .
.
9.3 Активная составляющая тока холостого хода при S=0
 .
.
9.4 Реактивная составляющая тока холостого хода при S=0
 .
.
9.5 Дальнейшие формулы для расчета рабочих характеристик сведены в табл. 9.1.
Расчет производится для ряда скольжений
![]() , где
, где ![]() .
.
при этом номинальное скольжение  .
.
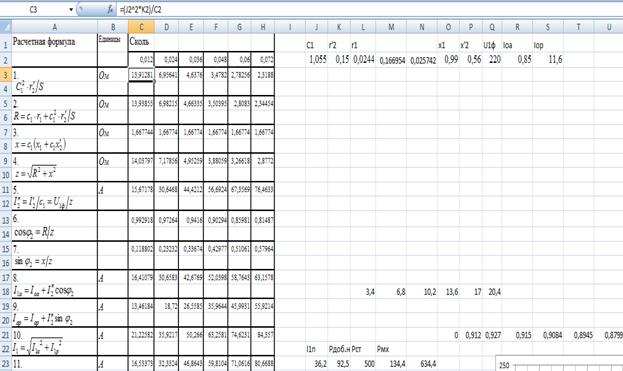
Т а б л и ц а 1 – Рабочие характеристики
Расчетная формула | Единицы | Скольжение S | ||||||
0,012 | 0,024 | 0,036 | 0,048 | 0,06 | 0,072 | |||
1 |
| Ом | 34,3183 | 17,159 | 11,439 | 8,5796 | 6,8637 | 5,7197 |
2 |
| Ом | 34,4765 | 17,317 | 11,598 | 8,7378 | 7,0219 | 5,878 |
3 |
| Ом | 1,66774 | |||||
4 |
| Ом | 34,5168 | 17,398 | 11,717 | 8,8956 | 7,2172 | 6,11 |
5 |
| А | 6,3737 | 12,645 | 18,776 | 24,731 | 30,483 | 36,007 |
6 |
| 0,99883 | 0,9954 | 0,9898 | 0,9823 | 0,9729 | 0,962 | |
7 |
| 0,04832 | 0,0959 | 0,1423 | 0,1875 | 0,2311 | 0,273 | |
8 |
| А | 7,21626 | 13,437 | 19,435 | 25,143 | 30,508 | 35,489 |
9 |
| А | 11,908 | 12,812 | 14,273 | 16,237 | 18,644 | 21,428 |
10 |
| А | 13,92386 | 18,5664 | 24,1127 | 29,9299 | 35,7534 | 41,4568 |
11 |
| А | 6,724255 | 13,341 | 19,8089 | 26,0917 | 32,1591 | 37,9871 |
12 |
| кВт | 4,76273 | 8,86859 | 12,8271 | 16,5943 | 20,135 | 23,423 |
13 |
| Вт | 87,24322 | 155,121 | 261,641 | 403,108 | 575,237 | 773,399 |
14 |
| Вт | 50,18932 | 197,56 | 435,555 | 755,662 | 1147,97 | 1601,75 |
15 |
| Вт | 35,57892 | 47,4419 | 61,6141 | 76,4782 | 91,3588 | 105,932 |
16 |
| кВт | 0,807411 | 1,03452 | 1,86965 | 1,86965 | 2,44897 | 3,11548 |
17 |
| кВт | 3,955318 | 7,83407 | 10,9575 | 14,7247 | 17,686 | 20,3075 |
18 |
| 0,830473 | 0,88335 | 0,85424 | 0,88733 | 0,87837 | 0,86699 | |
19 |
| 0,518266 | 0,72374 | 0,80601 | 0,84006 | 0,85328 | 0,85606 | |
20 |
| об/мин | 1482 | 1464 | 1446 | 1428 | 1410 | 1392 |
21 |
| Н·м | 25,18219 | 49,8769 | 69,7625 | 93,7472 | 112,601 | 129,291 |
9.6 По результатам расчетов, выполненных согласно таблице 9.1, производится построение рабочих характеристик асинхронного двигателя.
![]()
![]() Рисунок 9.1 – График зависимости
Рисунок 9.1 – График зависимости ![]()

![]()
![]() Рисунок 9.2 – График зависимости
Рисунок 9.2 – График зависимости ![]()
![]()
Рисунок 9.3 – График зависимости ![]()
9.7 После построения рабочих характеристик на оси абсцисс откладывается номинальная мощность (точка А), через точку А проводится параллельно оси ординат линия АВ, точками пересечения линии АВ с кривыми рабочих характеристик и определяются номинальные значения потребляемой мощности ![]() , тока
, тока ![]() , вращающего момента М2Н, коэффициента мощности cosφ1, коэффициента полезного действия, скорости вращения ротора nH и скольжения SH.
, вращающего момента М2Н, коэффициента мощности cosφ1, коэффициента полезного действия, скорости вращения ротора nH и скольжения SH.
9.8 Скольжение, соответствующее максимальному моменту
![]() .
.
9.9 Перегрузочная способность асинхронного двигателя
![]() Ом.
Ом.
![]()
Заключение
В ходе выполнения данной курсовой работы было изучено проектирование асинхронного двигателя с фазным ротором общепромышленного назначения.
Были определены главные размеры и выбраны электромагнитные нагрузки, рассчитано число пар полюсов, высота оси вращения, мощность асинхронного двигателя. Определены были число пазов статора и магнитный поток, номинальный ток обмотки статора, рассчитаны размеры пазов статора, активные и индуктивные сопротивления обмоток статора и ротора, потери в стали, добавочные потери и построены рабочие характеристики асинхронного двигателя.
В ходе проектировании асинхронного двигателя с фазным ротором были применены теоретические знания по электрическим машинам.
Список литературы
1. Кацман машины. – М.: Высшая школа, 1990.
2. Копылов электрических машин. – М. Энергия, 2002.
3. Копылов машины. – М.: Высшая школа, Логос, 2000.
4. Лихачев асинхронные. - М.: Высшая школа, 2002.
5. , , Свириденко электрических машин. /Под ред. . 2-е издание, перераб. и доп. - М.: Высшая школа, 20с.
6. , , Соболевская . Асинхронные двигатели серии 4А. - М.: Энергоиздат, 1982.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 |
