
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Совершенствование рабочих процессов выполнения текущих планировочных работ при выравнивании с/х полей
Многолетние исследования, проводимые различными организациями, показали, что при уменьшении амплитуды колебаний неровностей значительно падает объем воды потребной для орошения и ощутимо повышается урожай. Этот же факт подтвердили и исследования, проведенные в Краснодарском крае (рис. 1).
Рис. 1. Результаты исследований УГП ИЦ «Луч» Изменение объема потребной воды для орошения и увеличение урожая при уменьшении колебаний неровностей до ± 2 см | При экспериментальной планировке с доведением отклонений поверхности от «точки нулевых работ» до ±2см прирост урожая составил 19,5 ц/га. Ни у кого не вызывает сомнения то, что повышение качества планировочных работ значительно снизит вложения и повысит отдачу земель. Но как проводить планировочные работы, не имея представления о поверхности чека? Несколько лет назад в инженерном центре «ЛУЧ» был разработан автонивелир, для проведения вертикальной съемки поверхности поля – нивелировки. АН-1 (рис.2) предназначен для автоматического нивелирования поверхности земли через задаваемый интервал проведения в полевых | ||
условиях экспресс-оценки неровностей и оперативного определения проектной отметки, долговременного хранения данных нивелировки и передачи их в персональный компьютер для дальнейшей обработки по программам, обеспечивающим составление проектов планировочных работ. Автонивелир состоит из лазерного передатчика 4, и формирующего опорную горизон тальную плоскость 7, приемника 1, устройство монтируется на транспортном средст- |

ве 2, в качестве которого используется самоходное шасси Т-16М или ВТЗ-ЗОСШ.
Автонивелир работает следующим образом. В процессе передвижения базового транспортного средства по поверхности периодически производится автоматическая запись показаний нивелирования с шагом 8 см, осуществляемая на протяжении 3 м в зоне ± 1,5 м от условного пикета, местоположение которого определяется выбором интервала пикетирования 10 или 20 м. При этом, если оптический центр приемника находится на горизонтальной опорной плоскости, формируемой лазерным передатчиком, в устройстве вырабатывается сигнал «норма» и контроллер удерживает шток электромачты в неподвижном положении. В случае пересечения транспортным средством участка повышения или понижения рельефа оптический центр смещается вверх, или вниз относительно опорной плоскости, на контроллер поступает сигнал «вниз», или «вверх», который преобразуется в соответствующее перемещение штока электромачты, возвращающее оптический центр приемника на опорную плоскость (с точностью, определяемой размером зоны нечувствительности).
Таким образом, автонивелир представляет собой типовую следящую систему автоматического управления (САУ) с отрицательной обратной связью, состоящую из следующих звеньев: задающее устройство (лазерный передатчик); приемник; усилитель (контроллер); исполнительный орган (электромачта). В данной системе ошибка (рассогласование), примерно равная зоне нечувствительности приемника, устраняется исполнительным органом, управляемым контроллером. В процессе движения транспортного средства все перемещения штока электромачты автоматически записываются и хранятся в памяти контроллера, куда одновременно передаются и записываются сигналы от датчика пути. (рис. 2).
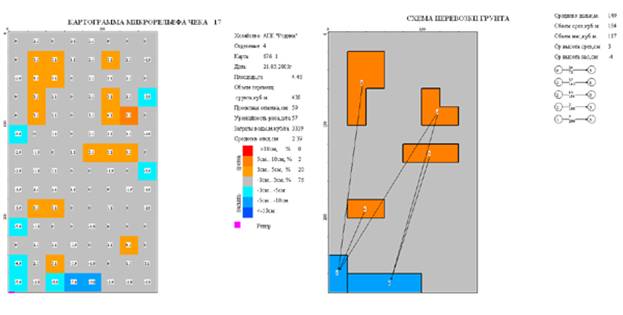
Двигаясь по поверхности поля, машина копирует его, а аппаратура фиксирует изменение положение фотоприемника относительно опорной поверхности создаваемой лазерной системой. Через каждые 8 см система фиксирует положение фотоприемника, а через 1,5 м определят среднее значение неровностей. После проведения нивелировочных работ данные обрабатываются специально разработанной программой и предоставляются пользователю (рис.3). Далее программа анализирует соотношение возвышений и углублений, предлагая маршрут движения планировщика и объем грунта, который необходимо переместить (рис.4)
После нивелировочных работ, результаты в виде картограммы представляются машинисту для проведения планировочных работ [2].
В таком виде система существовала до настоящего момента. Сейчас планируется совместить функции автонивелира и планировщика на одной машине - нивелир-планировщике с лазерной системой управления. То есть, отказаться от использования при вертикальной съемке отдельной машины, установив оборудование, непосредственно на сам планировщик. В процессе проведения планировочных работ, после нивелирования поверхности будет нужно только переключить систему из режима «съемка» в режим «планировка».
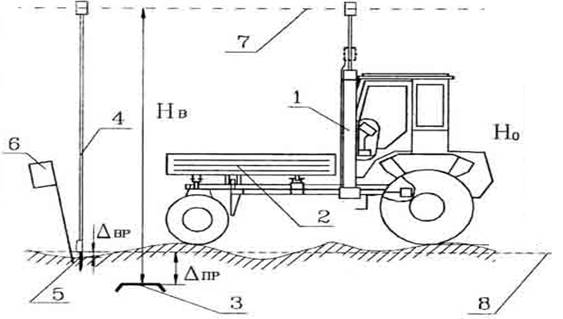
Рис.устройство УКПП-2М, 2 - самоходное шасси, 3 - постоянный
репер-оголовок водовыпуска, 4 - рейка с фотоиндикатором, 5 - временный репер,
6 - флажок 7 - лазерная опорная плоскость, 8 - проектная поверхность чека
Рис.4 Схема перевозки грунта. Результат обработки данных по нивелировке Рис.3. Картограмма микрорельефа чека. Результат проведения нивелировки
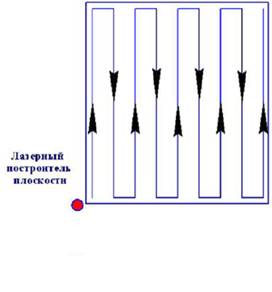
Проведенные в Краснодарском крае в феврале 2003 года исследования показали эффективность такого подхода к планировочным работам. Действительно, при проведении капитальной планировки (каждые 5-8 лет) [1, 2] или при строительстве чека есть необходимость исследовать всю поверхность поля, чтобы получить как можно более подробную картину поверхности (рис.5).
Рис. 5. Траектория движения автонивелира
 При проведении текущей планировки нет такой «острой» необходимости столь тщательно исследовать поверхность. К тому же это значительно затягивает процесс во времени и производить нивелировку, используя тяжелую базовую машину с прицепленным планировщиком, весьма дорого и не эффективно.
При проведении текущей планировки нет такой «острой» необходимости столь тщательно исследовать поверхность. К тому же это значительно затягивает процесс во времени и производить нивелировку, используя тяжелую базовую машину с прицепленным планировщиком, весьма дорого и не эффективно.
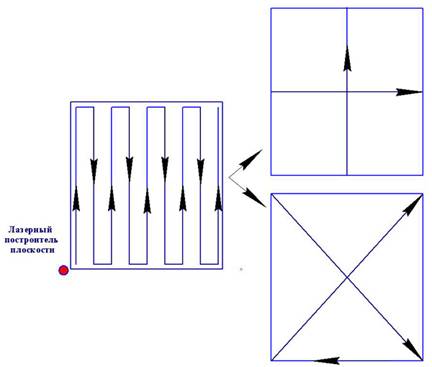
Рис. 6 Предполагаемые траектории движения нивелир-планировщика
В целях повышения качества планировки и сокращения времени, потребного на проведение работ было принято решение рассмотреть другие траектории движения машины. В качестве исходных были приняты две траектории: «крест» и «диагональная» (рис.6). По данным, полученным при проведении нивелировки на двадцати чеках были смоделированы предполагаемые результаты вертикальной съемки при движении по «упрощенной» траектории.

Рис. 7 Сравнительный анализ методов нивелирования
1-18 Порядковый номер чека
 Отметки при «капитальном» нивелировании
Отметки при «капитальном» нивелировании
 При «диагональном» способе
При «диагональном» способе
 При «крестовом» способе
При «крестовом» способе
В качестве данных для сравнения были прияты результаты нивелировки для капитальной планировки, по траектории «крест» и «диагональной» траектории, а итоговыми данными для сравнения была принята проектная отметка чека (рис. 7).
Проанализировав полученные результаты, предпочтение было отдано «диагональной» траектории. Это обусловлено следующими факторами: простота определения курса движение для машиниста и наиболее точный результат как следствие пересечения большего количества «контрольных» точек.
Разрабатываемую конструкцию и технологию планируется проверить на полевых испытаниях.
Вывод
При использовании новой конструкции нивелир-планировщика и разработке новых рекомендаций по технологии планировки орошаемых земель значительно снизятся затраты средств и времени на подготовку чеков. Однако использовать данную технологию планировки с применением нивелир-планировщика следует только при текущей планировке.
Библиографический список
1. /Комплексная автоматизированная технология планировки рисовых чеков. /Мелиорация. 2002.
2. Гаджиев планировки орошаемых земель. 1981.
3. , Камальдинов техника в мелиоративном строительстве. М.: Агропромиздат. 1989.
