

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
«ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Факультет – Электротехнический институт
Направление – Электротехника, электромеханика, электротехнологии
Кафедра – Электропривод и электрооборудование
Лабораторная работа №3
Принципы построения многокоординатных цифро-аналоговых электроприводов построенных на базе PCNC
Выполнили:
Студенты, гр.7М142 ___________
___________
___________
(подпись)
___________ (дата)
Проверил:
(ассистент) ___________
(подпись)
___________
(дата)
Томск - 2009
Цель работы:
1) изучение принципов построение многокоординатных цифровых электроприводов построенных на базе PCNC;
2) изучение элементной базы цифровой системы управления двухкоординатного стола;
3) экспериментальное исследование работы алгоритмов линейной интерполяции;
Описание экспериментального лабораторного стенда
Функциональная схема цифро-аналогового следящего электропривода (ЦАСЭП) состоит из двух основных частей (рис. 1):
1) серийно выпускаемого промышленностью реверсивного регулируемого электропривода (РЭП) «КЕМЕК».
2) устройства числового программного управления (PCNC - Personal Computer Numerical Control), которое реализовано на базе персонального компьютера и двух модулей ввода-вывода дискретной и аналоговой информации UNIO 96-5, AI16-5A-1 фирмы Fastwel.
РЭП «КЕМЕК» предназначен для реверсивных быстродействующих широкорегулируемых приводов с однозонным регулированием скорости механизмов подач станков, промышленных роботов и других механизмов. Данный РЭП выполнен по двухконтурной структуре (контур тока + контур скорости) подчиненного регулирования с реверсивным шестипульсным тиристорным преобразователем (ТП) с раздельным управлением группами вентилей типа 2РЕВ16. Диапазон регулирования скорости не менее 2000.
В комплект привода входят:
• шестипульсный реверсивный тиристорный преобразователь типа
2РЕВ16;
• высокомоментные двигатели серии 1ПИ с встроенными тахогенераторами;
• силовой трансформатор типа Т1ЕВ.
Следящая часть приводов механизмов станков и роботов управляется часто от устройств ЧПУ и реализуется, поэтому как аппаратными, так и программными способами. Аппаратным способом реализуется устройства питания, цифроаналоговые преобразователи (ЦАП) и аналого-цифровые (АЦП) преобразователи. Программно в нашем случае реализуется регулятор положения (РП) и обработка информации с фотоимпульсных датчиков положения.
Реализованная таким образом система с числовым программным управлением относится к классу PCNC-4, поскольку интерфейс оператора, ядро ЧПУ, контроллер электроавтоматики реализованы программно на одном персональном компьютере.
Рисунок 1 – Функциональная схема экспериментальной установки: ЦП – центральный процессор; HDD – жесткий диск; РЭП1, РЭП2 – регулируемые электроприводы; М1, М2 – электродвигатели; BRI, BR2 – тахогенераторы; BQ1, BQ2 – датчики положения;
U3C1, U3C2 – управляющие сигналы на РЭП; UTГ1, UTГ2 – сигналы обратной связи с тахогенераторов
Структурная схема следящего электропривода приведена на рис.2.
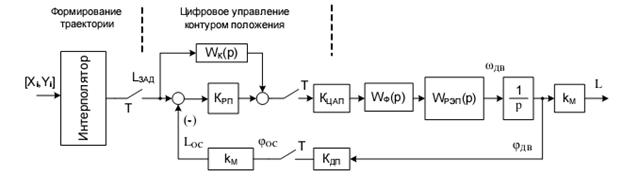
Рисунок 2 – Упрощенная структурная схема следящего электропривода
Результаты опытов
1. Траектория фигуры «квадрат» при частоте квантования 20 Гц представлены на рис.3.
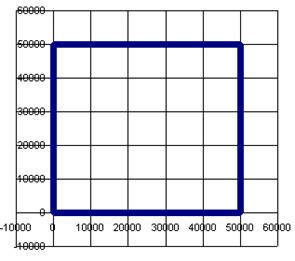
Рисунок 3 - Траектория фигуры «квадрат» при частоте квантования 20 Гц
На рис. 4 представлены зависимости изменения координатных ошибок ΔX и ΔY соответственно.
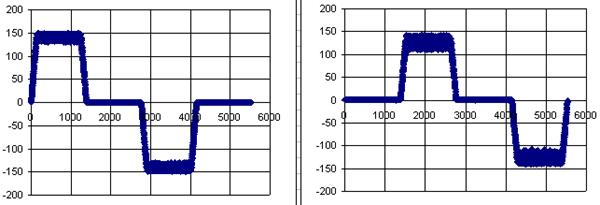
Рисунок 4 - Зависимости изменения координатных ошибок ΔX и ΔY
соответственно
На рис. 5 представлено изменение векторной ошибки δ
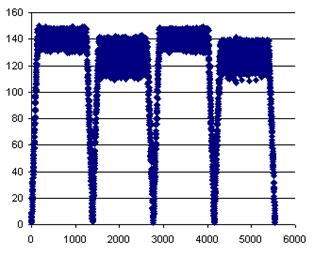
Рисунок 5 - Изменение векторной ошибки δ
2. Траектория фигуры «квадрат» при частоте квантования 60 Гц представлены на рис.6.
Рисунок 7 - Траектория фигуры «квадрат» при частоте квантования 60 Гц
На рис. 8 представлены зависимости изменения координатных ошибок ΔX и ΔY соответственно.
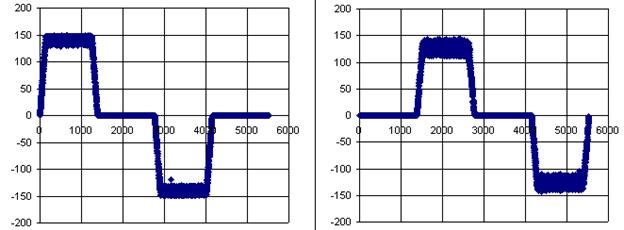
Рисунок 8 - Зависимости изменения координатных ошибок ΔX и ΔY
соответственно
На рис. 9 представлено изменение векторной ошибки δ
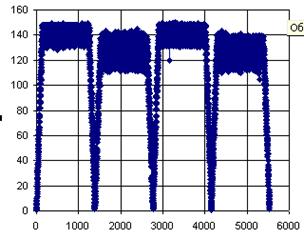
Рисунок 9 - Изменение векторной ошибки δ
3. Траектория фигуры «квадрат» при частоте квантования 100 Гц представлены на рис.10.
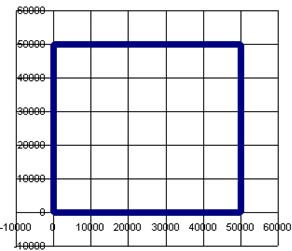
Рисунок 10 - Траектория фигуры «квадрат» при частоте квантования 100 Гц
На рис. 11 представлены зависимости изменения координатных ошибок ΔX и ΔY соответственно.
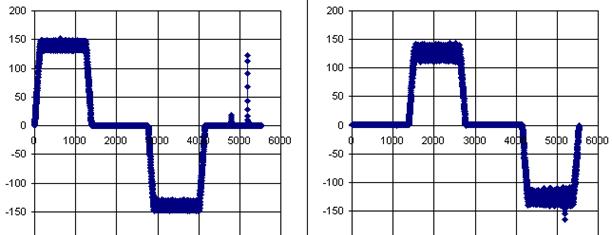
Рисунок 11 - Зависимости изменения координатных ошибок ΔX и ΔY
соответственно
На рис. 12 представлено изменение векторной ошибки δ
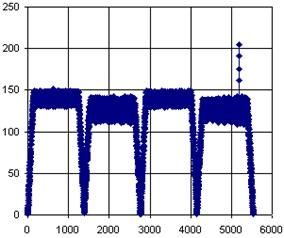
Рисунок 12 - Изменение векторной ошибки δ
4. Траектория фигуры «треугольник» при частоте квантования 20 Гц представлены на рис.13.
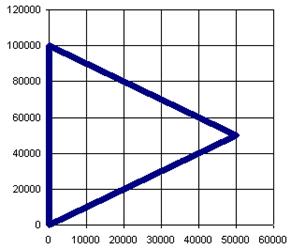
Рисунок 13 - Траектория фигуры «треугольник» при частоте
квантования 20 Гц
На рис. 14 представлены зависимости изменения координатных ошибок ΔX и ΔY соответственно.
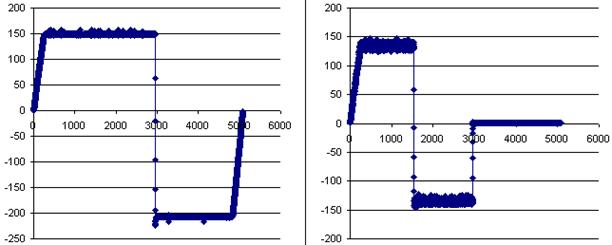
Рисунок 14 - Зависимости изменения координатных ошибок ΔX и ΔY
соответственно
На рис. 15 представлено изменение векторной ошибки δ
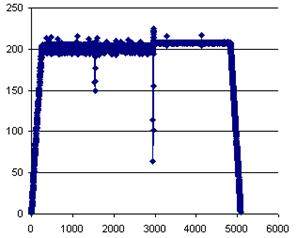
Рисунок 15 - Изменение векторной ошибки δ
5. Траектория фигуры «треугольник» при частоте квантования 60 Гц представлены на рис.16.
Рисунок 16 - Траектория фигуры «треугольник» при частоте
квантования 60 Гц
На рис. 17 представлены зависимости изменения координатных ошибок ΔX и ΔY соответственно.
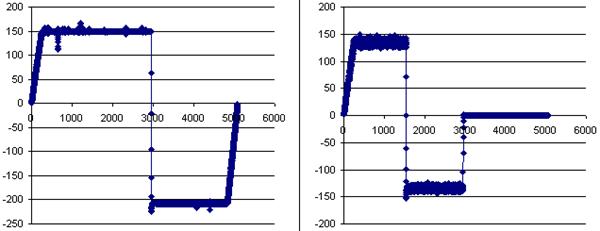
Рисунок 17 - Зависимости изменения координатных ошибок ΔX и ΔY
соответственно
На рис. 18 представлено изменение векторной ошибки δ
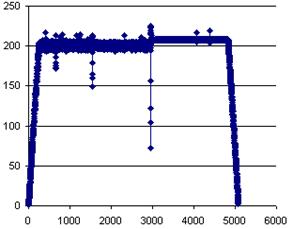
Рисунок 18 - Изменение векторной ошибки δ
6. Траектория фигуры «треугольник» при частоте квантования 100 Гц представлены на рис.19.
Рисунок 19 - Траектория фигуры «треугольник» при частоте
квантования 100 Гц
На рис. 20 представлены зависимости изменения координатных ошибок ΔX и ΔY соответственно.
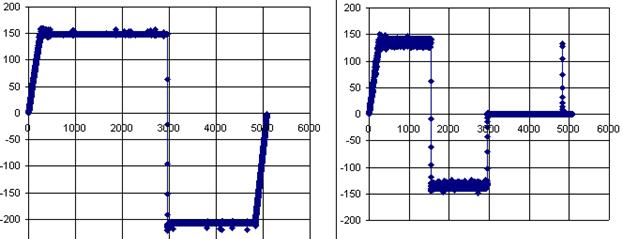
Рисунок 20 - Зависимости изменения координатных ошибок ΔX и ΔY
соответственно
На рис. 21 представлено изменение векторной ошибки δ
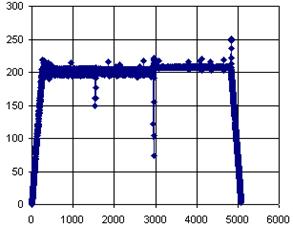
Рисунок 21 - Изменение векторной ошибки δ
7. Траектория фигуры «линия» при частоте квантования 20 Гц представлены на рис.22.
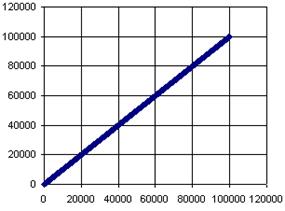
Рисунок 22 - Траектория фигуры «линия» при частоте квантования 20 Гц
На рис. 23 представлены зависимости изменения координатных ошибок ΔX и ΔY соответственно.
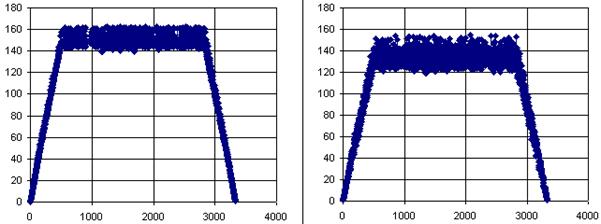
Рисунок 23 - Зависимости изменения координатных ошибок ΔX и ΔY
соответственно
На рис. 24 представлено изменение векторной ошибки δ
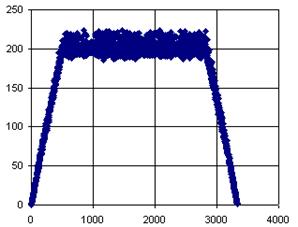
Рисунок 24 - Изменение векторной ошибки δ
8. Траектория фигуры «линия» при частоте квантования 60 Гц представлены на рис.25.
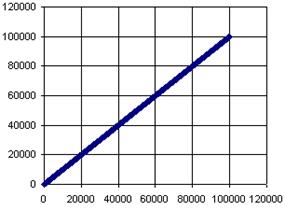
Рисунок 25 - Траектория фигуры «линия» при частоте квантования 60 Гц
На рис. 26 представлены зависимости изменения координатных ошибок ΔX и ΔY соответственно.
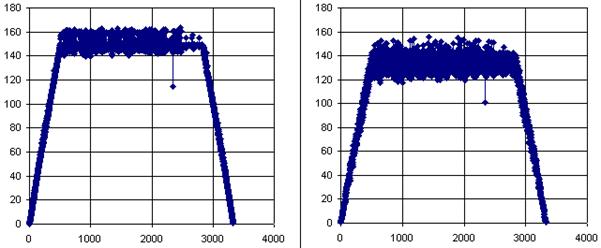
Рисунок 26 - Зависимости изменения координатных ошибок ΔX и ΔY
соответственно
На рис. 27 представлено изменение векторной ошибки δ
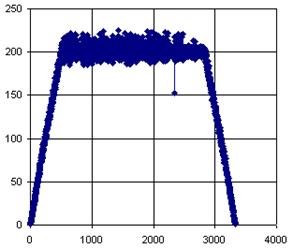
Рисунок 27 - Изменение векторной ошибки δ
9. Траектория фигуры «линия» при частоте квантования 100 Гц представлены на рис.28.
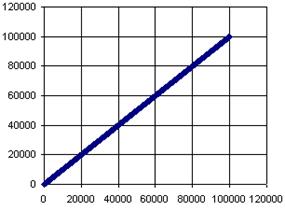
Рисунок 28 - Траектория фигуры «линия» при частоте квантования 100 Гц
На рис. 29 представлены зависимости изменения координатных ошибок ΔX и ΔY соответственно.
Рисунок 29 - Зависимости изменения координатных ошибок ΔX и ΔY
соответственно
На рис. 30 представлено изменение векторной ошибки δ
Рисунок 30 - Изменение векторной ошибки δ
Выводы:
В результате выполнения лабораторной работы были зафиксированы результирующая характеристика отработки заданного воздействия и характеристики координатных и векторной ошибок. Проанализировав, полученные графики можно сделать вывод, что координатные и векторные ошибки существенно зависят от задаваемой траектории. Ошибки появляются при изменении координаты во времени.
При отработке одной и той же траектории движения, но с разными частотами квантования сигнала происходит изменение величины ошибки. С уменьшением частоты уменьшается величина ошибки. При малых частотах квантование не все траектории отрабатывается, данный эффект связан с аппаратной поддержкой.
