
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
3.11 Определение приложения сил
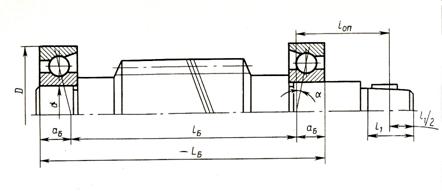
Рисунок 3.7 -Схема расположения подшипников.
Вал-червяк на радиально-упорных шарикоподшипниках, установленных в распор. Пользуясь приведённой схемой определяем точки приложения сил, по аналогии получаем размеры для червячного колеса.
3.12 Выбор муфты
Для соединения выходных концов двигателя и быстроходного вала редуктора, установленных, как правило, на общей раме, применены упругие втулочно-пальцевые муфты, эти муфты обладают достаточно упругими свойствами и малым моментом инерции для уменьшения пусковых нагрузок на соединяемые валы. Основной характеристикой для выбора муфты является номинальный вращающий момент Т, Н·м, установленный стандартом муфты выбирают по большему диаметру концов соединяемых валов и расчетному моменту Тр, который должен быть в пределах номинального:
Тр=Кр · T1=1,25·12=15Нм ≤ Т=31,5 Н·м
где Кр - коэффициент режима нагрузки; Т1 - вращающий момент на соответствующем валу редуктора, Н·м
Муфты упругие втулочно-пальцевые получили широкое распространение благодаря простоте конструкции и удобству замены упругих элементов. Однако они имеют небольшую компенсирующую способность и при соединении несоосных валов оказывают большое силовое воздействие на валы и опоры, при этом резиновые втулки быстро выходят из строя.
Выберем муфту упругую втулочно–пальцевую ГОСТ с характеристиками:
Момент Т=31,5 Н·м; угловая скорость не более 670 c-1; отверстие под вал 20 мм; отверстие под вал двигамм; смещение осей валов, не более: радиальное 0,2; угловое 1º 30'.
3.13 Расчет манипулятора
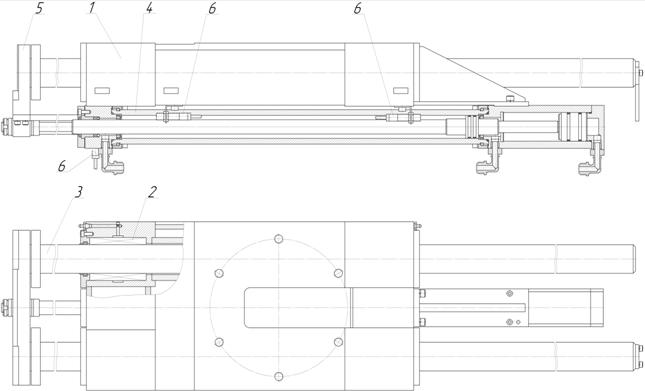
Рисунок 3.8 - Манипулятор.
Исходные данные:
Вес механической руки Qp 220 кг (по документам общего вида узла);
Диаметр штока цилиндра d=25 мм;
Диаметр цилиндра D=40 мм;
Рабочее давление Р=3 Мпа = 30 кг/см2;
Коэффициент трения f = 0.18;
Определяем КПД системы цилиндров
η=0,9 потери в уплотнениях штоков поршней одного цилиндра
ηобщ ∙0,93-0,129 потери в трех цилиндрах.
Определяем усилие, противодействующие штоку
Р = Qp∙f/η3 = 220∙0.18/0.129=54,3 кг=543 Н.
Определяем усилие действующее на штоке рабочего цилиндра
Q = 0.185 (D2-d2)p∙η
Q = 0.∙30∙0.129=161,3 кг = 1613 Н
543 Н <1613 Н
Выбранные размеры при проектировании обеспечат надежную работу.
Определим время движения руки по направляющим по длине рабочего хода.
Исходные данные:
l = 500 мм – длина рабочего хода;
D = 40 мм – диаметр цилиндра;
d = 25 мм – диаметр штока.
Определяем рабочую площадь цилиндра
F = 0,185 (D2-d2)=7,65 см2
Находим объем масла в рабочей полости
V=F∙S
V=7,65 ∙ 50 = 382, 68 см3 = 3,8268 литра
Определим время рабочего движения руки
t =  мин.
мин.
Где Qпр=24,5 л/мин – производительность насоса.
Для расчета усилия зажима определяем максимальную массу инструментального блока, для чего составим ведомость режущего и вспомогательного инструмента.
3.14 Расчет максимальной массы инструментального блока
Таблица 3.2
№ | Режущий инструмент | Вспомогательный инструмент | Масса Инстру- менталь- ного блока | ||
Наименование | Масса | Наименование | Масса | ||
2 | Фреза шпоночная | 0,4 | Оправка с конусом Морзе №2 | 7,84 | 8,24 |
3 | Фреза концевая | 1,8 | Оправка с конусом Морзе №3 | 7,74 | 9,54 |
4 | Фреза концевая | 2,0 | Оправка с конусом Морзе №3 | 7,74 | 9,74 |
5 | Фреза концевая | 2,1 | Оправка с конусом Морзе №3 | 7,74 | 9,84 |
6 | Фреза торцевая | 3,5 | Оправка шлицевая | 7,94 | 11,44 |
7 | Фреза торцевая | 3,5 | Оправка шлицевая | 7,94 | 11,44 |
8 | Сверло спиральное | 0,2 | Оправка с конусом Морзе №2 | 7,84 | 8,04 |
9 | Сверло спиральное | 0,3 | Оправка с конусом Морзе №2 | 7,84 | 8,14 |
10 | Сверло спиральное | 0,5 | Оправка с конусом Морзе №3 | 7,74 | 8,24 |
11 | Развёртка | 0,4 | Оправка с конусом Морзе №2 | 7,84 | 8,24 |
12 | Зенковка | 0,5 | Оправка с конусом Морзе №2 | 7,84 | 8,34 |
13 | Итого: | 101,24 |
Таким образом, максимальная масса инструментального блока составляет 11,44 кг. Примем вес инструментального блока 12 кг. Вес двенадцати инструментальных блоков составит около 110 кг.
3.15 Расчет усилия зажима инструмента схватом и зажимной пружины схвата
Расчётная схема схвата показана на рисунке
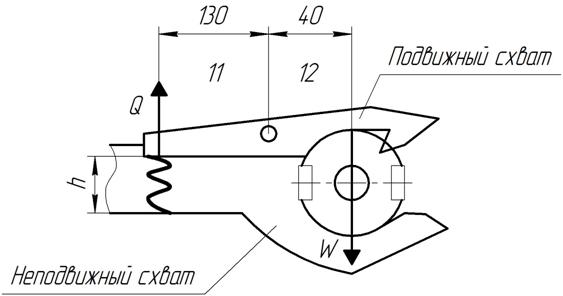
Рисунок 3.9- Схема схвата инструмента.
Сила зажима детали определяется по формуле:
![]()
P – вес переносимой детали; P = mg;
m – максимальная масса инструментально блока; m = 12 кг;
g – ускорение свободного падения; g = 9,8 м/с2;
a-ускорение при движении схвата : а=0,08 м/с2;
k – коэффициент запаса; k = 1,5
ή-коэффициент жесткости пружин ή=0,95:
![]()
Исходная сила пружин рассчитывается по формуле:
![]()
Исходные данные для подбора пружины :сила пружины при предварительной деформации Р1=57,7/2=28,8![]() ; рабочий ход h=15 мм. ;Наружный диаметр пружины 15-18 мм.: число циклов до разрушения N=1·107 : время рас фиксации t=0,5сек.
; рабочий ход h=15 мм. ;Наружный диаметр пружины 15-18 мм.: число циклов до разрушения N=1·107 : время рас фиксации t=0,5сек.
Расчёт:
Рассчитаем наибольшую скорость передвижения подвижного конца пружины при разгрузке :
![]()
Пользуясь таблицами отраслевых стандартов ОСТ 1., ОСТ 1. и ОСТ 1. находим, что при выносливости N=1·107 пружина относится к 1 классу.
По ОСТ 1. наиболее близко совпадают с заданными, параметрами пружин разряда 2 .
Р2=88,2 Н. (9,00 кгс); D=18 мм; d=3 мм; Р3=98 Н.(10 кгс); Z1=57,14 Н.(5,83 кгс).
По таблице ОСТдля пружин 1 класса требуется проволока из материала 60С2А при d=2 мм. Находим τ=102 кгс/мм2 .
Принадлежность пружины к 1 классу проверяем путём определения отношения ![]() , для чего предварительно определяем критическую скорость:
, для чего предварительно определяем критическую скорость:
![]() ;
; ![]() < 1
< 1
Полученная величина указывает на отсутствие соударения витков, следовательно выбранная стандартная пружина удовлетворяет заданным условиям.
Определяем остальные параметры:
жёсткость пружины ![]()
число рабочих витков ![]()
полное число витков 
 для d>0.8 n3=1.5
для d>0.8 n3=1.5
определяем средний диаметр пружины ![]() D
D
предварительная деформация ![]()
рабочая деформация ![]()
максимальная деформация ![]()
длинна пружины при максимальной деформации ![]()
длинна пружины в свободном состоянии ![]()
длинна пружины при предварительной деформации ![]() длинна пружины при рабочей деформации
длинна пружины при рабочей деформации 
Выберем пружину 79910.030x80 ГОСТ 1.
3.15 Расчёт гидроцилиндра манипулятора
Гидроцилиндр в манипуляторе предназначен для перемещения механической руки с инструментальными оправками от магазина к шпинделю и обратно.
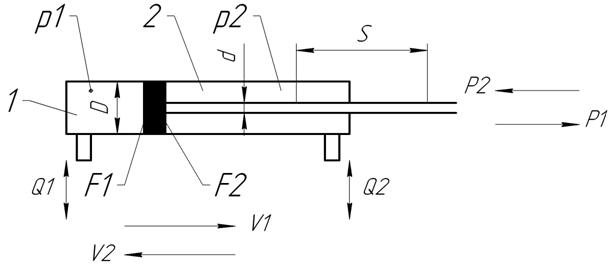
Рисунок 3.10- Основные параметры гидроцилиндра.
На рисунке показано: D-диаметр цилиндра (мм);d-диаметр штока (мм); F1 и F2-очая площадь поршня в поршневой 1 и штоковой камерах (см 2 );Р1 и Р2-усилие развиваемое цилиндром при движении поршня соответственно вправо и лево (Н);V1 и V2-скорость движения соответственно вправо и лево (м/мин);Q1 и Q2-количество масла поступающего в поршневую и штоковую камеры (л/мин);р1 и р2-давление масла в поршневой и штоковой камерах.
Исходные данные для гидроцилиндра:
Ход S=500 мм; время хода t=2.5 сек.; давление масла в напорной линии 4 Мпа; давление масла в сливной линии 0,5 Мпа.; масса механической руки с 2 оправками 60 кг.
Расчёт:
В металлорежущем станке инерционные нагрузки, действующие в момент разгона и торможения рабочих органов вычисляем по формуле:
![]() , где
, где
Скорость перемещения : ![]()
Ускорение : ![]()
Вес тела : ![]()

М1=60 кг – масса подвижных частей ; dТ1 и dТ2 – внутренний диаметр соответственно напорного и сливного трубопроводов (мм).
Исходя из конструктивных особенностей манипулятора установим стандартный d=25 мм, и проверим его на способность перемещать заданную нагрузку.
Рабочая площадь поршня в поршневой камере вычисляется: F1=D2 /127=12.6см2.
Рабочая площадь поршня в штоковой камере вычисляется: F1=D2-d2 /127=7,68см2.
При движении поршня вперёд (к шпинделю) , когда поршневая камера соединена с напорной линией, а штоковая со сливной, усилие развиваемое цилиндром рассчитывается :
![]()
При движении поршня назад (от шпинделя) , когда штоковая камера соединена с напорной линией, а поршневая со сливной, усилие развиваемое цилиндром рассчитывается :
![]()
Сравнивая Р=605<Р1=4420 и Р=605<Р2=3538 делаем вывод, что гидроцилиндр обеспечит перемещение механической руки с инструментальными блоками к шпинделю станка и обратно к магазину инструмента.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
