


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Тема: Динамический расчет системы автоматического
регулирования.
Целью проектирования является синтез корректирующего устройства для предложенной системы автоматического регулирования, исходя из заданных показателей качества, а именно: перерегулирования, времени регулирования и коэффициента ошибки, задача считается решенной, если показатели качества полученной скорректированной системы не превышают заданных.
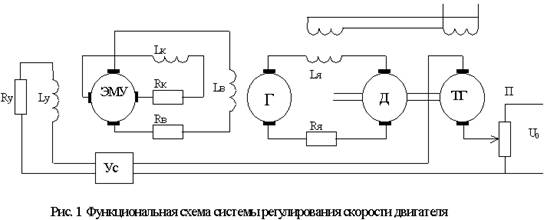
Назначение системы, изображенной на Рис.1 состоит в регулировании скорости вращения якоря электродвигателя ![]() , требуемое значение которой задается положением движка потенциометра
, требуемое значение которой задается положением движка потенциометра ![]() , при изменении момента нагрузки
, при изменении момента нагрузки ![]() .
.
Значение скорости ![]() вращения якоря двигателя с помощью тахогенератора преобразуется в напряжение
вращения якоря двигателя с помощью тахогенератора преобразуется в напряжение ![]() , которое сравнивается с напряжением задания U1 , соответствующим заданному значению скорости. Разность между этими напряжениями
, которое сравнивается с напряжением задания U1 , соответствующим заданному значению скорости. Разность между этими напряжениями  , пропорциональная отклонению скорости от заданного значения, усиливается последовательным электронным усилителем Ус и двумя каскадами электромашинного усилителя ЭМУ ( в его короткозамкнутой цепи и в главной цепи якоря ). Напряжением с выхода ЭМУ питается обмотка возбуждения генератора Г, который и управляет скоростью вращения якоря двигателя.
, пропорциональная отклонению скорости от заданного значения, усиливается последовательным электронным усилителем Ус и двумя каскадами электромашинного усилителя ЭМУ ( в его короткозамкнутой цепи и в главной цепи якоря ). Напряжением с выхода ЭМУ питается обмотка возбуждения генератора Г, который и управляет скоростью вращения якоря двигателя.
Показатели качества: ![]()
![]()
![]()
Параметры элементов системы:
Постоянная времени цепи управления ЭМУ ![]()
Постоянная времени короткозамкнутой цепи ЭМУ 
Постоянная времени цепи возбуждения генератора ![]()
Электромеханическая постоянная времени двигателя 
2 Математическое описание элементов САУ и системы в целом.
Найдем передаточные функции устройств системы.
а) Электронный усилитель.
б) Электромашинный усилитель.
При действии напряжения ![]() возникает ток
возникает ток ![]() , который в катушке порождает магнитный поток
, который в катушке порождает магнитный поток ![]() , который наводит в обмотках якоря ЭДС индукции
, который наводит в обмотках якоря ЭДС индукции![]() . В короткозамкнутой цепи ЭМУ протекает ток iq, который вызывает поток
. В короткозамкнутой цепи ЭМУ протекает ток iq, который вызывает поток ![]() , который действует на вторичную обмотку ЭМУ.
, который действует на вторичную обмотку ЭМУ.
Для режима ХХ :
 ;
;  , следовательно
, следовательно ![]()




 - коэффициент передачи по напряжению
- коэффициент передачи по напряжению
 - постоянная времени короткозамкнутой цепи ЭМУ
- постоянная времени короткозамкнутой цепи ЭМУ
 - постоянная времени управляющей цепи
- постоянная времени управляющей цепи

Преобразование Лапласа:


в) Двигатель
Для описания динамики двигателя нужно связать дифференциальным уравнением скорость двигателя ![]() с электродвижущей силой ЭМУ и моментом нагрузки
с электродвижущей силой ЭМУ и моментом нагрузки ![]() . По второму закону Кирхгофа уравнение электрического равновесия для цепи якоря:
. По второму закону Кирхгофа уравнение электрического равновесия для цепи якоря:
 ,
,
где ![]() - напряжение самоиндукции
- напряжение самоиндукции
![]() - падение напряжения на активном сопротивлении обмотки якоря
- падение напряжения на активном сопротивлении обмотки якоря
![]() - противо ЭДС, возникающая в обмотке якоря двигателя при вращении.
- противо ЭДС, возникающая в обмотке якоря двигателя при вращении.
Момент вращения, развиваемый двигателем на валу, преодолевает момент нагрузки и инерцию вращающихся частей.
Уравнение моментов: ![]() , где
, где ![]() - приведенный к валу двигателя момент инерции всех вращающихся частей.
- приведенный к валу двигателя момент инерции всех вращающихся частей.
 - противо ЭДС пропорциональна скорости вращения якоря
- противо ЭДС пропорциональна скорости вращения якоря
 - момент вращения якоря пропорционален току якоря
- момент вращения якоря пропорционален току якоря


Применим преобразование Лапласа:
 - постоянная времени якорной цепи
- постоянная времени якорной цепи
 - электромеханическая постоянная двигателя
- электромеханическая постоянная двигателя
 - постоянная двигателя по управляющему воздействию
- постоянная двигателя по управляющему воздействию
 - постоянная времени по возмущающему воздействию
- постоянная времени по возмущающему воздействию
 - передаточная функция по управляющему воздействию
- передаточная функция по управляющему воздействию
 - передаточная функция по возмущающему воздействию.
- передаточная функция по возмущающему воздействию.
В двигателях малой и средней мощности электромагнитные переходные процессы заканчиваются значительно быстрее механических вследствие малой величины ![]() . Пренебрегая постоянной времени
. Пренебрегая постоянной времени ![]() по сравнению с
по сравнению с ![]() , получаем упрощенную передаточную функцию двигателя.
, получаем упрощенную передаточную функцию двигателя.
![]()
г) Тахогенератор.
Т. к. входной величиной тахогенератор является угловая скорость то передаточную функцию тахогенератора можно записать как :
д) Генератор
![]()
![]() ,
,
где ![]() и
и ![]() индуктивность и сопротивление цепи возбуждения
индуктивность и сопротивление цепи возбуждения
Запишем операторные выражения:


Передаточная функция
Структурная схема системы изображена на рисунке 2
Передаточная функция не скорректированной системы принимает такой вид:
![]()
3 Расчет необходимого коэффициента передачи
В передаточной функции разомкнутой не скорректированной системы можно выделить общий коэффициент передачи разомкнутой системы ![]() :
:

где ![]() - передаточная функция, содержащая только звенья с единичным коэффициентом передачи.
- передаточная функция, содержащая только звенья с единичным коэффициентом передачи.
Величина этого коэффициента однозначно определяется заданным значением коэффициентом ошибки. В нашем случае для системы без астатических элементов этот коэффициент определяется так: ![]()
Так как в нашем случае ![]() , то получаем что
, то получаем что ![]() .
.
Итак ![]() .
.
В результате, передаточная функция разомкнутой не скорректированной системы имеет вид:

4 Расчет вида и параметров корректирующего устройства методом логарифмических частотных характеристик.
Проверим на устойчивость заданную систему.
Характеристическое уравнение разомкнутой системы
![]()
или ![]()
Проверим на устойчивость по критерию Гурвица:
![]()
![]()
Система получилась неустойчивой, что и следовало ожидать т. к. коэффициент передачи системы очень большой. В этом случае мы должны применить синтез корректирующего устройства.
Коррекция применяется как средство обеспечения устойчивости неустойчивой системы или расширения области устойчивости и повышения качества переходных процессов.
Путь синтеза корректирующего устройства:
а) синтезировать необходимую передаточную функцию последовательного корректирующего устройства и рассчитать его параметры;
б) проверить, удовлетворяется ли требование заданных показателей качества;
в) в случае, если эти требования удовлетворяются с хорошим запасом, нужно попытаться упростить передаточную функцию корректирующего звена;
г) рассмотреть возможные варианты коррекции в виде последовательно включенного четырехполюсника или в виде местной обратной связи.
д) рассчитать параметры элементов выбранного корректирующего устройства.
![]()
Звенья нескорректированной системы:
1. ![]() - идеальное усилительное звено
- идеальное усилительное звено ![]()
2. ![]() - инерционное звено 1-го порядка
- инерционное звено 1-го порядка ![]()
![]()
3. ![]() - инерционное звено 1-го порядка
- инерционное звено 1-го порядка ![]()
![]()
4. ![]() - инерционное звено 1-го порядка
- инерционное звено 1-го порядка ![]()
![]()
5. ![]() - инерционное звено 1-го порядка
- инерционное звено 1-го порядка ![]()
![]()
ЛАЧХ не скорректированной системы представлена в приложении 1.
Одним из самых удобных и наглядных методов синтеза является метод ЛАЧХ.
Построение желаемой ЛАЧХ основано на связи переходного процесса с вещественной частотной характеристикой (ВЧХ) замкнутой системы и ЛАЧХ разомкнутой.
С помощью графиков, изображенных на рис.8 [3] определяем параметры ![]() и
и ![]() ВЧХ, соответствующие заданному
ВЧХ, соответствующие заданному ![]() :
:
![]()
![]()
Далее - определяем ![]() , исходя из нужного
, исходя из нужного ![]() и полученного
и полученного ![]() ;
;
![]()
![]()
Выберем ![]() из следующих соображений:
из следующих соображений:
1. ![]()
2. чем больше ![]() тем меньше
тем меньше ![]()
3. чем меньше ![]() тем проще корректирующее устройство
тем проще корректирующее устройство
Возьмем ![]()
Переходим к построению желаемой ЛАЧХ
На оси 0 дб отмечаем точку ![]() и через нее проводим прямую с наклоном
и через нее проводим прямую с наклоном ![]() . Это будет среднечастотная асимптота желаемой ЛАЧХ
. Это будет среднечастотная асимптота желаемой ЛАЧХ ![]()
Низкочастотную асимптоту будем проводить из следующих соображений:
Если проводить ее под наклоном  , то происходит усложнение передаточной функции корректирующего звена. А если провести асимптоту с наклоном
, то происходит усложнение передаточной функции корректирующего звена. А если провести асимптоту с наклоном ![]() т. е. продолжить среднечастотную часть
т. е. продолжить среднечастотную часть ![]() , то при относительной простоте корректирующего устройства и его
, то при относительной простоте корректирующего устройства и его ![]() мы можем получить большой разброс параметров. На низких частотах
мы можем получить большой разброс параметров. На низких частотах ![]() должна совпадать с не скорректированной ЛАЧХ, для того чтобы коэффициент передачи был равен требуемому для обеспечения заданной точности регулирования.
должна совпадать с не скорректированной ЛАЧХ, для того чтобы коэффициент передачи был равен требуемому для обеспечения заданной точности регулирования.
Далее придерживаемся следующего правила - сопряжение на высоких частотах не будем производить. Это приведет к упрощению корректирующего звена, но возможно также некоторое увеличение времени регулирования и перерегулирования.
Логарифмические частотные характеристики приведены в приложении 2
ЛАЧХ корректирующего устройства получаем путем графического вычитания ЛАЧХ нескорректированной системы из ЛАЧХ желаемой приложение 3.
По виду ЛАЧХ ![]() из таблицы 4 [3] подбираем звено с ЛАЧХ, совпадающей с полученной.
из таблицы 4 [3] подбираем звено с ЛАЧХ, совпадающей с полученной.
Рассмотрим это звено.
Электрическая схема и ЛАЧХ представлены на рис.4
 |
Рис.4 Электрическая схема и ЛАЧХ корректирующего звена
Передаточная функция найденного корректирующего звена выглядит так:
![]()
Передаточная функция скорректированной системы выглядит так:
![]()
Квадратичная интегральная оценка не зависит от знаков отклонений, а значит от формы переходного процесса (монотонной или колебательной). Величина I будет тем меньше, чем меньше сумма заштрихованной площади, т. е. чем лучше переходный процесс приближается к идеальному скачку регулируемой величины.
Исходя из минимума интегральной оценки, требуется выбрать параметры корректирующего устройства. Выражение соответствующей интегральной оценки.
 |
Для нахождения минимальной интегральной оценки две частоты ![]() и
и ![]() изменяем, с условием, что
изменяем, с условием, что ![]() должно быть меньше или равно
должно быть меньше или равно ![]() . Расчеты были произведены с помощью пакета MathCad. Результаты занесены в таблицу 1.
. Расчеты были произведены с помощью пакета MathCad. Результаты занесены в таблицу 1.
В данной таблице содержатся только те значения интегральной оценки, при которых показатели качества переходного процесса удовлетворяют заданным.
 |
Таблица 1.
Из таблицы видно, что область минимальной интегральной оценки находится в диапазоне ![]() ,
, ![]() . Исходя из минимума интегральной оценки
. Исходя из минимума интегральной оценки ![]() были определены параметры корректирующего устройства (
были определены параметры корректирующего устройства ( ,
,  ). Переходная характеристика приведена в приложении 4.
). Переходная характеристика приведена в приложении 4.
Для нашего случая
![]()
![]()
Определим параметры четырехполюсника, составив систему уравнений :
![]()
![]()
В результате решения этой системы получаем такие параметры четырехполюсника (параметр ![]() приняли равным
приняли равным ![]() ):
):
Из номинального ряда:
![]()
![]()
![]()
![]()
![]()
![]()
Рассмотрим вариант параллельной коррекции.
Связь между передаточными функциями последовательного корректирующего звена и эквивалентной ему обратной связи и, наоборот, параллельного корректирующего звена и эквивалентного ему последовательного выражаются следующими формулами.
Подключим корректирующее звено параллельно усилителю.

![]() ;
; ![]() ;
; 
![]()
По виду передаточной функции ![]() из таблицы 4 [3] подбираем звено с такой же передаточной функцией.
из таблицы 4 [3] подбираем звено с такой же передаточной функцией.
Рассмотрим это звено.
Электрическая схема и ЛАЧХ представлены на рис.5
 |
 |
Рис.5 Электрическая схема и ЛАЧХ корректирующего звена для параллельной коррекции
![]()
Проведем повторную оптимизацию параметров корректирующего устройства с помощью интегрально-квадратичной оценки. Результаты занесены в таблицу 2.
В данной таблице содержатся только те значения интегральной оценки, при которых показатели качества переходного процесса удовлетворяют заданным.
0,14 0,15 0,16 0,17 0,4 0,1154 0,1181 0,121 0,41 0,1152 0,118 0,1211 0,42 0,1151 0,1181 0,1213 0,42 0,11256 0,1153 0,1184 0,1217 0,44 0,1128 0,1157 0,1189 0,1223
Таблица 2
![]()
![]()
Из таблицы видно, что область минимальной интегральной оценки находится в диапазоне ![]() ,
, ![]() . Исходя из минимума интегральной оценки
. Исходя из минимума интегральной оценки ![]() были определены параметры корректирующего устройства (
были определены параметры корректирующего устройства ( ,
,  ).
).
Для нашего случая
![]() ;
; ![]()
Определим параметры четырехполюсника, составив систему уравнений :
![]() ;
; ![]()
В результате решения этой системы получаем такие параметры четырехполюсника (параметр ![]() приняли равным
приняли равным ![]() ):
):
Из номинального ряда:
![]()
![]()
![]()
![]()
![]()
![]()
![]() ;
; ![]()
Выбор типа коррекции.
Рассмотрев два вида коррекции, было решено воспользоваться параллельной коррекцией, так как она обладает следующими преимуществами:
Во-первых, обратную связь, как правило, легче реализовать из-за того, что на её вход поступает более мощный сигнал, чем уровень мощности в той точке системы, куда подключается выход цепи обратной связи.
Второе преимущество относится к свойству отрицательных обратных связей уменьшать отрицательное влияние нелинейностей, имеющихся в охваченной части системы, а также нестабильность её параметров.
Третье преимущество заключается в том, что входное сопротивление четырехполюсника при последовательной коррекции очень велико по сравнению с четырехполюсником при параллельной коррекции.
5 Определение показателей качества скорректированной САУ
Для полученных значений строим переходную функцию скорректированной системы. Получилось, что перерегулирование ![]() , а время регулирования
, а время регулирования ![]() . Значит, полученное звено можно использовать для получения качественного процесса, удовлетворяющего начальным условиям.
. Значит, полученное звено можно использовать для получения качественного процесса, удовлетворяющего начальным условиям.
Коэффициент ошибки стабилизации
![]()
Так как коэффициент передачи я оставил без изменения, следовательно, коэффициент ошибки останется прежним  .
.
Запасы устойчивости
Запасы устойчивости определяем по логарифмическим частотным характеристикам. Логарифмические частотные характеристики приведены в приложении 2.
Запас по амплитуде: ![]() .
.
Запас по фазе: ![]() .
.
В результате передаточная функция скорректированной системы примет вид:
![]()
6 Построение области устойчивости скорректированной САУ.
Необходимо исследовать влияние параметров САУ на устойчивость. Для решения этой задачи служит построение областей устойчивости, т. е. определение таких областей значений параметров, при которых система оказывается устойчивой. Требуется построить область устойчивости в плоскости двух параметров: сопротивления ![]() и ёмкости
и ёмкости ![]() корректирующего устройства.
корректирующего устройства.
Записываем характеристический комплекс и уравнения, определяющие границу устойчивости.

Решая их совместно относительно параметров ![]() и
и ![]() , получим их выражения. Затем задаваясь различными значениями частоты
, получим их выражения. Затем задаваясь различными значениями частоты ![]() в пределах от минус бесконечности до плюс бесконечности, по полученным формулам можно вычислить значения искомых параметров.
в пределах от минус бесконечности до плюс бесконечности, по полученным формулам можно вычислить значения искомых параметров.
![]()
![]()
По полученным данным строим кривую D- разбиения (приложение 6).
Чтобы показать по какую сторону кривой разбиения больше левых или правых корней, на кривую наносят штриховку. При движении по полученной кривой от минус бесконечности до нуля необходимо штриховать область, лежащую слева от кривой. При движении по полученной кривой от нуля до плюс бесконечности необходимо штриховать область, лежащую справа от кривой.
Область устойчивости сформирована. Область устойчивости будет ограничиваться полученной кривой и положительным направлением оси ![]() .
.
Приложение 1
 |
Приложение 2
 |
Список литературы
1. Теория автоматического регулирования. Часть первая.
Под редакцией . "Высшая школа" 1986
2.Теория систем автоматического регулирования.
. "Наука" 1972
3. Методическая разработка для курсового проектирования
по курсу "ТАР".
4. Курс лекций по предмету "Теория автоматического регулирования"
