


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
САМАРСКИЙ ГОСУДАРСТВЕННЫЙ
АЭРОКОСМИЧЕСКИЙ УНИВЕРСИТЕТ
имени академика С. П. КОРОЛЕВА
Кафедра ИСТ
Лабораторная работа №2
По курсу «Теоретические основы автоматического управления»
«Анализ работы системы управления в пакете
моделирования динамических систем Simulink»
Вариант №48
Выполнила: Киру E.Е.
Студентка группы: 6403
Проверил:
Самара 2010
Постановка задачи:
Цель работы - моделирование работы динамической системы, построение ступенчатой характеристики рассматриваемой системы, а также построение приближенной зависимости максимальной ошибки воспроизведения гармонического сигнала от частоты этого сигнала.
Исходные данные:
Дана линейная динамическая система:
И оптимальное управление:

где B – матрица коэффициентов.
При
Создание модели системы управления в пакете Simulink
1) Система в данном пакете задается блок-схемой приведенной на рисунке 1:
Рисунок 1. Блок-схема системы управления
Где подсистема Object:
Рисунок 2. Блок-схема подсистемы Object
Подсистема Regulator:
Рисунок 3. Блок-схема подсистемы Regulator
После симуляции были получены следующие результаты:
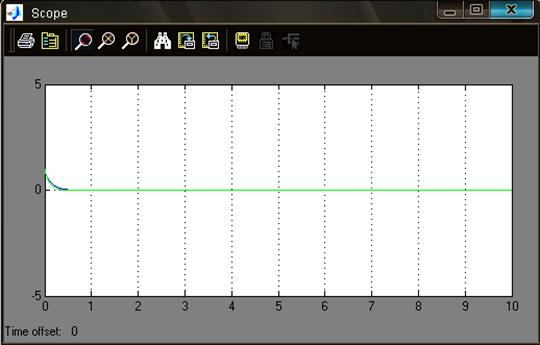
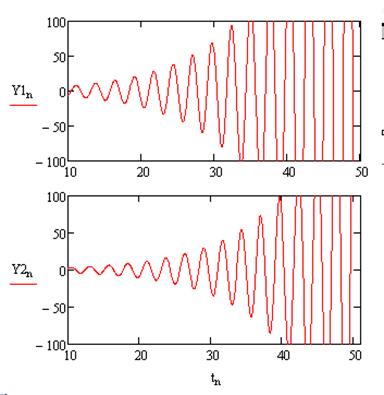
Рисунок 4. Зависимости y1 и y2 от времени t, полученные с помощью системы Simulink
При этом в Mathcad получились следующие графики:
Рисунки 5,6. Зависимости y1 и y2 от времени t, полученные с помощью Mathcad
Графики совпадают, что говорит о правильности найденного в Matchcad решения.
2) Теперь проанализируем реакцию системы на единичное ступенчатое импульсное возмущение.
Импульсное ступенчатое возмущение представляет собой импульс со следующими свойствами:
Для построения переходной ступенчатой характеристики к системе управления присоединяется блок ступенчатого сигнала. А совместную схему объекта и регулятора видоизменяют, чтобы система обрабатывала заданную входную функцию Xз(t).
В этом случае система дифференциальных уравнений принимает вид:
Тогда система будет иметь асимптотически устойчивое решение X=Xз и цель системы управления по отработке заданной функции достигается.
Общая схема на рис.7:
Рисунок 7.Общая блок-схема переходной ступенчатой характеристики
Подсистема Object+Regulator:
Рисунок 8. Блок-схема подсистемы Object+Regulator
После симуляции были получены следующие результаты:
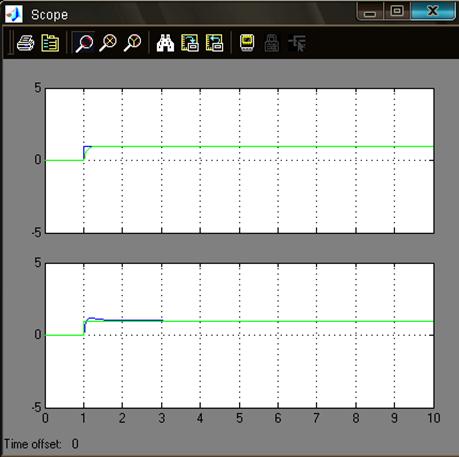
Рисунок 9. Результаты работы системы при ступенчатом воздействии
3) Построим переходную характеристику системы управления при гармоническом заданном сигнале:
В данном случае используется та же схема, что и для ступенчатого входного воздействия. Разница лишь в том, что вместо блока ступенчатого воздействия используется блок гармонического сигнала.
Нужно построить приближенную зависимость ошибки воспроизведения заданной функции по каждой компоненте двумерного вектора X от частоты гармонического сигнала.
Общая схема на рис.10:
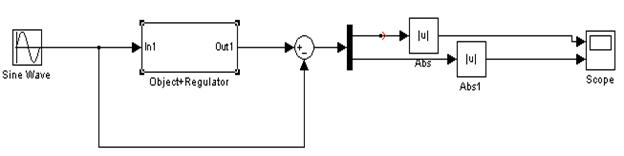
Рисунок 10. Общая блок-схема переходной характеристики системы при гармоническом заданном сигнале.
После симуляции были получены следующие результаты:
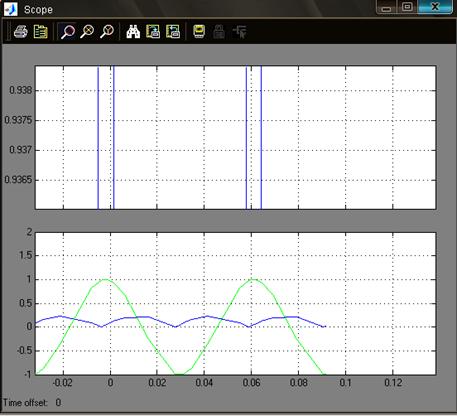
Как уже было сказано, подсистема Object+Regulator не претерпела никаких изменений. Она изображена на рисунке 8.
Ниже приведена таблица зависимости максимальной ошибки воспроизведения сигнала от его частоты (таблица 1) и график этой зависимости (Рисунок 11).
Частота (рад/сек) | Погрешность x1 | Погрешность x2 |
0 | 15 | -3 |
0,05 | 14,285 | -3,809 |
0,1 | 13,36 | -4,574 |
0,15 | 12,237 | 5,925 |
0,2 | 10,928 | -6,491 |
0,25 | 9,451 | -6,972 |
0,3 | 7,823 | -7,36 |
0,35 | 6,067 | -7,649 |
0,4 | 4,205 | -7,833 |
0,45 | 2,263 | -7,909 |
0,5 | 0,267 | -7,875 |
0,55 | -1,756 | -7,729 |
0,6 | -3,777 | -7,742 |
Таблица 1. Зависимость максимальной погрешности воспроизведения функции от частоты гармонического сигнала.
Рисунок 11. График зависимости погрешности воспроизведения функции от частоты гармонического сигнала.
Вывод
Моделирование работы динамической системы показало, что она является устойчивой. При подаче гармонического сигнала была исследована зависимость максимальной погрешности воспроизведения от частоты этого сигнала.
