


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ЭКЗАМЕНАЦИОННЫЙ БИЛЕТ № 21
1.Реле времени с электромагнитным замедлением.
Способы замедления отпускания якоря электромагнита
Конструкция реле времени с электромагнитным замедлением
Принцип действия реле времени с электромагнитным замедлением
Влияние напряжения питания и температуры на стабильность выдержки времени
Реле времени предназначены для задания выдержки времени до момента замыкания (размыкания) контактов.
Существуют различные технические реализации реле времени: электронные (аналоговые, цифровые), механические (пневматические, гидравлические), электромагнитные.
Электромагнитное реле времени (реле времени с электромагнитным замедлением) основано на использовании вихревых токов для замедления срабатывания электромагнитной системы.
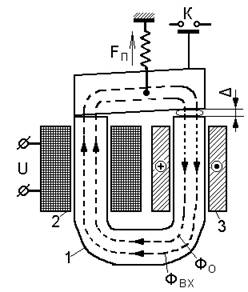
Рис. 6.10 Электромагнитное реле времени
На магнитопровод 1 надета металлическая (медная) гильза 3, равнозначная короткозамкнутой обмотке с одним витком. Когда изменяется основной поток Ф0, созданный током катушки 2, в гильзе 3 наводятся вихревые токи, поток ФВХ от которых имеет направление, препятствующее изменению основного потока.
После затухания тока i2 в цепи устанавливается остаточный магнитный поток, определяемый кривой размагничивания материала магнитопровода и воздушным зазором. Возможны случаи, когда остаточный магнитный поток создает силу притяжения большую, чем сила, развиваемая пружиной. Происходит так называемое залипание якоря, когда якорь остается в притянутом положении после отключения питающей обмотки. Для устранения залипания на торце сердечника или якоря устанавливается тонкая немагнитная прокладка. Наличие этой прокладки обеспечивает фиксированный достаточно малый конечный зазор dк ≠ 0, что приводит к снижению остаточного магнитного потока и устранению залипания.
Выдержка времени при отпускании при прочих равных условиях определяется начальным потоком Фу уравнения. Этот поток определяется кривой намагничивания магнитной системы в замкнутом состоянии. Поскольку напряжение и ток в обмотке пропорциональны, зависимость Ф(U) повторяет в другом масштабе зависимость Ф(Iw).
Если система при номинальном напряжении не насыщена, то поток Фу сильно зависит от питающего напряжения. При этом выдержка времени также зависит от напряжения обмотки. Для независимости выдержки времени от питающего напряжения магнитная цепь электромагнитов делается сильно насыщенной. На рис. 6.11,а представлена кривая намагничивания магнитной системы Ф = f(U). В зоне насыщения колебания питающего напряжения на ±DU ведут к незначительному изменению установившегося потока Фу и колебанию времени отпускания в пределах от t1 до t2.
Вся рабочая зона лежит в области напряжений выше 0,5 Uном. При работе и ненасыщенной зоне U <0,5Uном даже небольшие колебания питающего напряжения приводят к значительному изменению потока Фу и выдержки времени на отпускание.
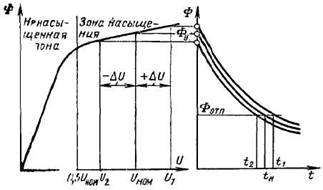
Рис. 6.11. Характеристика намагничивания магнитной системы и зависимость времени отпускания от напряжения питания
В разнообразных схемах автоматики, в которых используются электромагниты, напряжение на их питающие обмотки может подаваться кратковременно. В этом случае дли стабильности выдержки времени при отпускании необходимо, чтобы длительность приложения питающего напряжения была достаточна для достижения потоком установившегося значения. Это время называется временем подготовки или зарядки. Если длительность приложения напряжения меньше этого времени, то выдержка времени уменьшается. Время зарядки зависит от габаритов реле и составляет около 1 с.
На выдержку времени электромагнита влияет температура короткозамкнутой обмотки. Согласно (5.90)
здесь t – время отпускания; q – температура нагретой короткозамкнутой обмотки.
Заводы-изготовители гарантируют работу таких электромагнитов в диапазоне температур от – 40 до +60°C. Если температура короткозамкнутой обмотки равна окружающей, то при указанном изменении температуры сопротивление, а следовательно, и выдержка времени изменятся почти в 1,5 раза. В среднем можно считать, что изменение температуры на каждые 10°С ведет к изменению времени выдержки на 4 %. Зависимость выдержки времени от температуры является одним из основных недостатков электромагнитов с короткозамкнутой обмоткой.
Регулирование выдержки времени на отпускание реле осуществляется следующими методами:
изменением активного сопротивления короткозамкнутого витка, уменьшение его увеличивает время отпускания за счет увеличения постоянной времени и снижения скорости спадания потока;
изменением толщины немагнитной прокладки в воздушном зазоре (влияет на результирующую магнитную проводимость), уменьшение толщины увеличивает время отпускания, за счет снижения скорости спадания потока;
изменением натяжение противодействующей пружины.
2.Привести скоростные характеристики двигателя параллельного и последовательного возбуждения машины. Пояснить их физический смысл.
1. Двигатель параллельного возбуждения (если напряжение обмотки возбуждения иное, то такой двигатель называется двигателем независимого возбуждения).
2. Двигатель последовательного возбуждения.
3. Двигатель смешанного возбуждения.
 1.Двигатели параллельного возбуждения
1.Двигатели параллельного возбуждения
Принципиальная схема включения двигателя параллельного возбуждения представлена на рис. 43. Для пуска используется пусковой реостат (п. р.). Свойства двигателя определяются его характеристиками.
1.Скоростная характеристика, зависимость  ,
,  ,
, 

 Скоростная характеристика при
Скоростная характеристика при  называется естественной, рис. 44. Если
называется естественной, рис. 44. Если  , то характеристика называется реостатной. Так как сопротивление якоря
, то характеристика называется реостатной. Так как сопротивление якоря  , как правило мало, то с увеличением тока якоря падение напряжения в якорной цепи мало и скорость уменьшается незначительно. Поэтому, естественная характеристика двигателя получается жесткой.
, как правило мало, то с увеличением тока якоря падение напряжения в якорной цепи мало и скорость уменьшается незначительно. Поэтому, естественная характеристика двигателя получается жесткой.
2.Двигатели последовательного возбуждения
а
Обмотка возбуждения двигателя включена последовательно с якорем, рис. 45а. Ток якоря равен току возбуждения. Поэтому обмотка возбуждения имеет большое сечение и малое число витков. Последовательное соединение обмотки возбуждения является отличительной особенностью этого двигателя и влияет на вид характеристик. С увеличением тока якоря, увеличивается поток, скорость двигателя резко падает, т. е.получается мягкая скоростная характеристика, рис. 46.
а |
 1.Скоростная характеристика ,
1.Скоростная характеристика ,  .
.
В общем виде, за счет насыщения, не имеет решение, аналитическое выражение скоростной характеристики можно получить только для ненасыщенной машины, когда ![]() , рис. 46.
, рис. 46.
 Момент
Момент  , при
, при ![]() ,
,  , т. е. если ток нагрузки возрастает в 2 раза, то момент в 4 раза. Это условие и определяет область применения этих двигателей, т. е. используются там, где при пуске нужен большой пусковой момент (тяговый привод). Скоростная характеристика при
, т. е. если ток нагрузки возрастает в 2 раза, то момент в 4 раза. Это условие и определяет область применения этих двигателей, т. е. используются там, где при пуске нужен большой пусковой момент (тяговый привод). Скоростная характеристика при ![]() , запишется:
, запишется:  .
.
3.Математические модели электродвигателей постоянного тока, регулируемых по цепям якоря и возбуждения как объектов управления (функциональные схемы; схемы замещения; обыкновенные дифференциальные уравнения; структурные схемы).
Электродвигатель постоянного тока (ДПТ) представляет собой объект управления, регулируемый, в общем случае, по цепям якоря и возбуждения [4]. Функциональная схема и схемы замещения электродвигателя приведены на рис. 4.2.
 а) б)
а) б)
 |
в)
г)
 |
Рис. 4.2. Функциональная схема (а) и схемы замещения (б, в, г) электродвигателя постоянного тока
Применяя декомпозицию ДПТ, нетрудно заметить, что в его структуре имеются три основных подсистемы или цепи (см. рис. 4.2б, 4.2в, 4.2г):
- цепь якоря, питаемая регулируемым напряжением Uя; Rэ, Lэ – соответственно эквивалентное активное сопротивление и эквивалентная индуктивность якорной обмотки; Eд – э. д.с. электродвигателя; iя – ток якоря;
- цепь возбуждения, питаемая регулируемым напряжением Uв; Rв, Lв – соответственно эквивалентное активное сопротивление и эквивалентная индуктивность обмотки возбуждения; iв – ток возбуждения;
- электромеханическая цепь, обеспечивающая преобразование электромагнитной энергии в энергию вращения вала ротора; Jд – приведенный к валу двигателя момент инерции электродвигателя и вращаемого механизма; M, Mc – соответственно электромагнитный момент электродвигателя и момент сопротивления на его валу; ![]() - скорость вращения вала двигателя.
- скорость вращения вала двигателя.
Приведем описание ДПТ в различных формах, что позволит при необходимости легко установить взаимосвязь математических моделей.
Для описания динамических моделей электрических цепей электродвигателя (см. рис. 4.2) воспользуемся законами Кирхгофа, а для описания механической цепи – 2-м законом Ньютона. Тогда получим систему дифференциальных уравнений:
![]()
 ,
,
 , (4.23)
, (4.23)
 ,
,
где ![]() ,
, ![]() - электромагнитные постоянные времени соответственно обмотки якоря и обмотки возбуждения,
- электромагнитные постоянные времени соответственно обмотки якоря и обмотки возбуждения,  ,
,  .
.
Электромагнитные цепи двигателя взаимосвязаны. При подаче напряжения ![]() , по цепи якоря протекает ток
, по цепи якоря протекает ток ![]() , создающий электромагнитный момент, вращающий ротор,
, создающий электромагнитный момент, вращающий ротор,
![]() , (4.24)
, (4.24)
где ![]() - конструктивная постоянная двигателя.
- конструктивная постоянная двигателя.
Электромагнитные и механическая цепь также взаимосвязаны, т. к. ток, протекающий по обмотке возбуждения, создает магнитный поток Ф, пронизывающий обмотку якоря и наводящий в ней э. д.с. вращения,
![]() , (4.25)
, (4.25)
где ![]() - конструктивная постоянная двигателя, в системе СИ равная по величине
- конструктивная постоянная двигателя, в системе СИ равная по величине ![]() .
.
Анализируя выражения (4.24), (4.25), заметим, что произведение переменных приводит к нелинейности математической модели электродвигателя, регулируемого одновременно по цепям якоря и возбуждения. Кроме того, при регулировании напряжения возбуждения двигателя проявляется нелинейный характер изменения потока Ф в функции тока возбуждения iв (намагничивающей силы F = wв iв, где wв – число витков обмотки возбуждения). Кривая намагничивания ДПТ соответствует нелинейному звену типа «насыщение» (рис. 4.3).
 |
Рис. 4.3. Кривая насыщения магнитной цепи ДПТ
Рабочая точка А с координатами {F0, Ф0} на кривой насыщения соответствует некоторому, например номинальному режиму работы ДПТ.
ДПТ как нелинейный ОУ, регулируемый по цепям якоря и возбуждения, в соответствие с выражениями (4.23)…(4.25) и рис. 4.3 может быть представлен в виде структурной схемы (рис. 4.4)
 |
Рис. 4.4. Структурная схема ДПТ, регулируемого по цепям якоря
и возбуждения, как нелинейного объекта управления
Пусть электродвигатель регулируется только по цепи якоря (напряжение возбуждения ![]() , а, следовательно, и
, а, следовательно, и ![]() ). Тогда математическая модель электродвигателя примет вид
). Тогда математическая модель электродвигателя примет вид
![]()
 , (4.26)
, (4.26)
 .
.
Математическая модель в виде (4.26) описывает ДПТ как линейный объект 2-го порядка.
Для перехода от дифференциальных уравнений (4.26) к операторным уравнениям произведем замену ![]() . Тогда получим
. Тогда получим
![]()
 , (4.27)
, (4.27)
 .
.
По операторным уравнениям (4.27) составим структурную схему электродвигателя, приведенную на рис. 4.4.
Рис. 4.5. Структурная схема ДПТ, регулируемого по цепи якоря
Как видим, структурная схема ДПТ, регулируемого по цепи якоря, содержит 4 типовых линейных динамических звена: апериодическое, интегрирующее и 2 безынерционных звена, а также 2 суммирующих звена.
Пусть ДПТ регулируется одновременно по цепи якоря и возбуждения, причем изменения аддитивных (управляющих и возмущающих) воздействий незначительны или, по крайней мере, непрерывны. Тогда нелинейную модель ДПТ целесообразно линеаризовать в окрестности вектора рабочих траекторий и представить в виде линейной модели. В качестве рабочих траекторий примем уравнения M0 = Cм Ф0 i я0, Eд = Cе Ф0 ω0, а все переменные ДПТ будем рассматривать в приращениях, т. е. в малой окрестности рабочих траекторий и обозначать через символ приращения ∆. Проведем также касательную линеаризацию кривой намагничивания, задавшись координатами {F0, Ф0} текущей рабочей точки и соответствующими приращениями ![]() (см. рис. 4.3).
(см. рис. 4.3).
Тогда математическую модель ДПТ можно представить системой уравнений в приращениях
![]()
 ,
,
(4.28)
 ,
,
![]() ,
,
где ![]() ,
, ![]() - приращения координат э. д.с. двигателя и электромагнитного момента вдоль вектора рабочих траекторий;
- приращения координат э. д.с. двигателя и электромагнитного момента вдоль вектора рабочих траекторий;
![]() - приращение магнитного потока;
- приращение магнитного потока;
![]() - коэффициент линеаризации кривой насыщения магнитной цепи, являющийся функцией координат рабочей точки (см. рис. 4.3).
- коэффициент линеаризации кривой насыщения магнитной цепи, являющийся функцией координат рабочей точки (см. рис. 4.3).
Структурная схема ДПТ, соответствующая уравнениям (4.28), приведена на рис. 4.6.
Рис. 4.6. Структурная схема ДПТ, регулируемого по цепям якоря
и возбуждения как линеаризованного объекта управления
