

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
электроники»
Модуль управления реверсивным коллекторным двигателем
AWD-10
Паспорт
МДТУ. 421826.002ПС
ТУ
г. Москва 2007.
1 Описание и работа модуля.
Модуль цифрового привода AWD-10 предназначен для управления реверсивными коллекторными двигателями с рабочим напряжением 12-200В и током до 10А. Модуль привода позволяет:
- стабилизировать скорость вращения двигателя без тахогенератора;
- управлять скоростью и направлением вращения двигателя: по интерфейсу RS-485 или с помощью логических сигналов «Старт/стоп», «Вперед/назад» и аналогового сигнала «Скорость вращения»;
- обрабатывать сигналы концевых выключателей для остановки вращения;
- задавать порог срабатывания защиты то превышению тока в цепи двигателя;
- ограничивать момент на валу двигателя;
- получать по интерфейсу RS-485 реальную скорость вращения двигателя и реальное положение вала;
- задавать коэффициенты цифрового ПИД - регулятора скорости вращения;
AWD-10 | |
Напряжение питания двигателя, В | 12 – 300 |
Ток двигателя, А | <10 |
Пределы регулирования скорости вращения с погрешностью до 2% | 1:15 |
Пределы регулирования скорости вращения с погрешностью до 5% | 1:100 |
Потребляемая мощность, Вт | 1 |
Рабочий диапазон температур, °С | -40…+50 |
Габаритные размеры, мм | 100*80*15 |
Модуль выпускается в виде отдельной платы с разъемами для подключения входных и выходных сигналов. Расположение разъемов показано на Рис. 1.
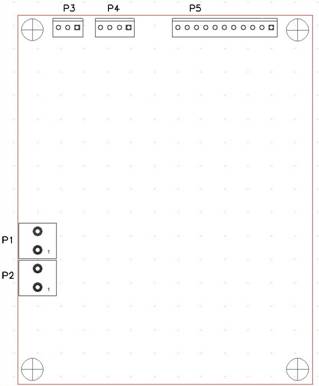
Рис. 1. Расположение разъемов.
P1 – разъем для подключения питания.
Р2 – разъем для подключения двигателя.
P3 – разъем для подключения внешнего питания, для использования с двигателями на напряжение более 36В.
P4 – разъем интерфейса RS485.
P5 – разъем для подключения управляющих сигналов.
Назначение контактов.
Р1 | Сигнал |
1 | Напряжение питания двигателя +12…36В или 36-200В |
2 | Общий |
Р2 | Сигнал |
1 | Выход на двигатель «+» |
2 | Выход на двигатель «-» |
P3 | Сигнал |
1 | Общий |
2 | Выход «+5В» |
3 | Питание «+12В» |
Р4 | Сигнал |
1 | Общий |
2 | Общий |
3 | RS-485 сигнал «А» |
4 | RS-485 сигнал «B» |
Р5 | Сигнал |
1 | «+» Аналоговый вход 0. Скорость вращения |
2 | «–» Аналоговый вход 0. Скорость вращения |
3 | «–» Аналоговый вход 1 |
4 | «+» Аналоговый вход 1 |
5 | +5В – включить движение «Вперед» со скоростью на аналоговом входе 0. |
6 | +5В – включить движение «Назад» со скоростью на аналоговом входе 0. |
7 | «0» – сработал концевой выключатель при движении «Вперед». |
8 | «0» – сработал концевой выключатель при движении «Назад». |
9 | +5 В |
10 | Общий |
11 | Общий для внешних сигналов |
Основные элементы модуля и их назначение:
- микроконтроллер для приема управляющих сигналов и реализации алгоритмов управления двигателем
- интерфейс RS485 для связи с ЭВМ или контроллером верхнего уровня
- формирователь ШИМ сигнала управления двигателем
- силовые ключи на полевых транзисторах
- блок измерения тока двигателя
- аппаратный ограничитель тока двигателя
- ЦАП для задания ограничения максимального тока двигателя
- АЦП для измерения ЭДС двигателя
- АЦП для измерения внешних аналоговых управляющих сигналов
- цифровые входы для обработки управляющих сигналов и сигналов от концевых выключателей
- элементы защиты выходных и входных цепей.
Модуль позволяет управлять скоростью вращения двигателя либо командами по RS485, либо с помощью аналогового входного сигнала. Настройка ПИД-регулятора и порога срабатывания схемы защиты по току может быть произведена только по интерфейсу RS485.
Внешний вод модуля представлен на Рис. 2.
Рис. 2. Внешний вид модуля AWD-10.
Модуль имеет защиту от короткого замыкания в нагрузке. При коротком замыкании модуль автоматически отключает нагрузку и через 1 секунду плавно включает двигатель.
При питании двигателя напряжением более 36В, необходимы изменения в схеме питания, для чего следует обратиться к изготовителю.
Эксплуатационные ограничения:
- запрещается соединять разъемы при включенном питании
- не допускать попадания на модуль посторонних предметов и жидкостей
- не допускаются механические повреждения
Модуль при установке может быть ориентирован любым образом.
Модули поставляются с сетевым адресом «5». При использовании нескольких модулей или при использовании совместно с другими устройствами на шине RS 485 следует запрограммировать нужный сетевой адрес.
2.3.1 Управление с помощью внешних сигналов.
Модуль может управляться с помощью внешних сигналов. Скорость вращения определяется напряжением на «Аналоговом входе 0». Вход дифференциальный, имеет прямой «+» и инверсный «-» вход (при использовании только прямого входа, инверсный следует подключить к общему проводу Р4.10). Вращение начинается при подаче +5 на контакт Р4.5 или Р4.6. Движение останавливается при размыкании концевых выключателей в соответствующим направлении, при этом движение возможно только в обратную сторону. При отсутствии концевых выключателей необходимо соответствующие входы замкнуть на +5В.
2.3.2 Управление с помощью интерфейса RS485.
Модуль может управляться с помощью интерфейса RS485. Скорость обмена 9600 Бод. 1 старт бит, 1 стоп бит. Протокол обмена описан в приложении 1.
Модуль не требует технического обслуживания.
Ремонт модуля производится только у производителя.
Модуль следует хранить в закрытых помещениях с естественной вентиляцией при температуре от минус 50 до плюс 50 ºС и влажности 80 % при температуре плюс 20 ºС. Наличие в воздухе паров кислот, щелочей и других агрессивных примесей не допускается.
Модуль может транспортироваться всеми видами закрытого транспорта в соответствии с правилами перевозок, действующими на каждом виде транспорта.
Утилизация производится в порядке, принятом на предприятии-потребителе. При утилизации вредного влияния на окружающую среду не оказывается.
электроники», г. Москва, Тетеринский пер., стр.1. тел/факс +7(495)7 тел +7(495)6787168.
www. *****.
Дата изготовления _____________
Дата проверки _____________
Число модулей в партии _____________
Приложение .
Протокол обмена данными по RS485 с модулем AWD-01
Обмен ведется по восемь бит в слове, один стоп-бит, без паритета. Скорость передачи 9600 бод.
Команды передаются блоками по 8 слов, в ответ привод AWD передает сообщение о результате выполнения команды. Формат команд и ответных сообщений приведен в таблице 1.
Таблица 1
Наименование слова | Описание | КС |
Address | Сетевой адрес | + |
CmdCode | Код выполняемой команды | + |
Addr_hi | Старший байт адреса | + |
Addr_lo | Младший байт адреса | + |
Data_hi | Старший байт данных | + |
Data_lo | Младший байт данных | + |
CRC16_hi | Старший байт контрольной суммы | 0 |
CRC16_lo | Младший байт контрольной суммы | Результат |
Ответное сообщение содержит в CmdCode код выполненной команды, и совпадает с кодом, переданным в команде в случае успешного выполнения. В случае если во время выполнения команды произошла ошибка, то в CmdCode ответного сообщения содержится код ошибки.
Значение контрольной суммы вычисляется как дополнение до нуля суммы всех полей сообщения отмеченных знаком «+» в колонке «КС» таблицы 1. Старший байт контрольной суммы не участвует в расчетах и всегда равен НУЛЮ. Младший байт контрольной суммы – это младший байт от суммы полей, указанных в таблице 1. Пример команды «05, 87, 0F, 00, 00, 00, 00, 65».
Коды ошибок
Таблица 2
Код ошибки | Описание ошибки |
0xE1 | Ошибка CRC |
0xD2 | Команда не поддерживается |
0xC3 | Неправильный параметр команды |
0xB4 | Ошибка выполнения команды |
Команда ECHO предназначена для проверки связи с платой привода.
Формат команды ECHO
Поле команды | Значение поля |
CmdCode | 0xF0 |
Addr_hi | 0 |
Addr_lo | 0 |
Data_hi | 0 |
Data_lo | 0 |
Формат ответного сообщения
Поле команды | Значение поля |
CmdCode | 0xF0 |
Addr_hi | 0 |
Addr_lo | 0 |
Data_hi | 0 |
Data_lo | 0 |
Команда CMDGETPARAM предназначена для считывания настраиваемых параметров. Номера параметров приведены в таблице 3.
Формат команды CMDGETPARAM
Поле команды | Значение поля |
CmdCode | 0x87 |
Addr_hi | Номер параметра |
Addr_lo | 0 |
Data_hi | 0 |
Data_lo | 0 |
В случае удачного завершения передается ответное сообщение, содержащее значение параметра.
Формат ответного сообщения
Поле команды | Значение поля |
CmdCode | 0x87 |
Addr_hi | Номер параметра |
Addr_lo | 0 |
Data_hi | Старший байт параметра |
Data_lo | Младший байт параметра |
Команда CMDSETPARAM предназначена для установки настраиваемых параметров. Как правило, значения параметров также записываются во Flash память платы, во время выполнения команды. Номера параметров и диапазон значений приведены в таблице 3.
Формат команды CMDSETPARAM
Поле команды | Значение поля |
CmdCode | 0x78 |
Addr_hi | Номер параметра |
Addr_lo | 0 |
Data_hi | Старший байт параметра |
Data_lo | Младший байт параметра |
В случае удачного завершения передается ответное сообщение, формат и содержание которого полностью совпадает с командой.
Команда CMDGETRESULT предназначена для считывания текущих результатов обработки данных. Номера результатов приведены в таблице 4.
Формат команды CMDGETRESULT
Поле команды | Значение поля |
CmdCode | 0x3C |
Addr_hi | Номер результата |
Addr_lo | 0 |
Data_hi | 0 |
Data_lo | 0 |
В случае удачного завершения передается ответное сообщение, содержащее значение результата.
Формат ответного сообщения
Поле команды | Значение поля |
CmdCode | 0x3C |
Addr_hi | Номер результата |
Addr_lo | 0 |
Data_hi | Старший байт результата |
Data_lo | Младший байт результата |
Номера параметров для команд CMDGETPARAM и CMDSETPARAM.
Таблица 3
Название параметра | Значение | Диапазон значений | Начальные значения | |
Сетевой адрес | 0x00 | 0x00 – 0xFF | 0x05 | |
Смещение нуля внешнего аналогового входа 0 | 0x01 | 0x00 – 0x3FF | 0x10 | |
Смещение нуля внешнего аналогового входа 1 | 0x02 | 0x00 – 0x3FF | 0x10 | |
Ограничение минимального значения ШИМ | 0x0d | 0x00 – 0x3FF | 0х05 | |
Ограничение максимального значения ШИМ | 0x0e | 0x00 – 0x3FF | 0х3DF | |
Пропорциональный коэффициент ПИД регулятора | Кп | 0x0F | 0x00 – 0xFFFF | 0x300 |
Интегральный коэффициент ПИД регулятора | Ки | 0x10 | 0x00 – 0xFFFF | 0x0A0 |
Дифференциальный коэффициент ПИД регулятора | Кд | 0x11 | 0x00 – 0xFFFF | 0x000 |
Ограничение пропорциональной части ПИД регулятора | 0x15 | 0x00 – 0xFFFF | 0x3FF | |
Ограничение интегральной части ПИД регулятора | 0x16 | 0x00 – 0xFFFF | 0x300 | |
Ограничение дифференциальной части ПИД регулятора | 0x17 | 0x00 – 0xFFFF | 0x3FF | |
Коэффициент периода вычисления ПИД регулятора. Период вычисляется по формуле: 200 мкс * Тк | Тк | 0x18 | 0x00 – 0x0FFF | 0x0A0 |
Коэффициент времени задержки перед измерением ЭДС двигателя. Задержка вычисляется по формуле: 200 мкс * Тз | Тз | 0x19 | 0x00 – 0x0F | 0x05 |
Количество измерений ЭДС двигателя | 0x1a | 1, 2, 4, 8, 0x10 | 0x10 | |
Ограничение максимального тока двигателя | 0x1b | 0x00 – 0x0F | 0x0F |
Номера параметров для команды CMDGETRESULT.
Таблица 4
Название параметра | Значение | Диапазон значений | |
Значение АЦП внешнего аналогового канала 0 | 0x00 | 0x00 – 0x3FF | |
Значение АЦП внешнего аналогового канала 1 | 0x01 | 0x00 – 0x3FF |
Работа ПИД регулятора
Расчет управляющего воздействия на двигатель (ШИМ) выполняется по следующей формуле:
 ,
,
где:
![]() - текущая ошибка управления;
- текущая ошибка управления;
 - предыдущая ошибка управления;
- предыдущая ошибка управления;
![]() - пропорциональный коэффициент регулятора;
- пропорциональный коэффициент регулятора;
![]() - интегральный коэффициент регулятора;
- интегральный коэффициент регулятора;
![]() - дифференциальный коэффициент регулятора;
- дифференциальный коэффициент регулятора;
