
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 626.82
C., аспірант, Маланчук Є. З., інженер-програміст
(Національний університет водного господарства та природокористування, м. Рівне)
ІМІТАЦІЙНА SIMULINK-МОДЕЛЬ СИСТЕМИ КЕРУВАННЯ
ГІДРОМОНІТОРНИМ РОЗМИВОМ ПРИ СВЕРДЛОВИННОМУ
ГІДРОВИДОБУТКУ КОРИСНИХ КОПАЛИН
Запропонована система управління гідромоніторним розмивом при свердловинному гідровидобутку корисних копалин та проведено її імітаційне моделювання в пакеті MatLab/Simulink.
It is offered the control system of giant washout in the processes of hydroextraction of minerals with the help of mining hole and it is conducted its imitation modeling in MatLab/Simulink.
Технологічні особливості свердловинної гідротехнології видобутку корисних копалин [1] та значна енерго- і ресурсоємність вимагають використання для досягнення високих техніко-економічних показників сучасних систем автоматизації. В основі свердловинного гідровидобутку лежать наступні технологічні операції: руйнування масиву породи корисної копалини високошвидкісним струменем води, транспортування породи до підйомного механізму (ерліфта, гідроелеватора), піднімання гідросуміші на поверхню та гідротранспортування корисної копалини до місць наступної переробки [2]. Спрощена технологічна схема свердловинного гідровидобутку наведена на рис.1.
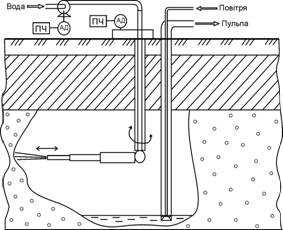
Рис. 1. Технологічна схема свердловинного гідровидобутку
Розробка систем автоматизації технології свердловинного гідровидобутку та їх дослідження, а особливо моделювання, є важливим науково-технічним завданням.
Свердловинний гідровидобуток корисних копалин використовується з тридцятих років минулого століття, проте автоматизація цього процесу через недостатній розвиток технічних засобів автоматизації перебувала на низькому рівні. В основному вона зводилася до автоматичного обліку параметрів технологічного процесу та автоматизації окремих контурів, управління гідророзмивом здійснювалось оператором по консистенції пульпи на поверхні або програмним способом. Лише останнім часом з розвитком електронно-обчислювальної та вимірювальної техніки постало питання комплексної автоматизації цього процесу. Сучасні мікропроцесорні та програмні засоби автоматизації, такі як програмовані логічні контролери (ПЛК), інтелектуальні реле, універсальні мікропроцесорні регулятори дають змогу здійснювати багаторівневу автоматизацію складних процесів з контролем багатьох параметрів та використанням різноманітних законів управління [3].
Синтез системи управління гідромоніторним розмивом потребує встановлення структурних зв’язків між вхідними та вихідними параметрами, вибору контрольованих параметрів, керуючих впливів, розробки структури системи автоматизації та підбору сучасних технічних засобів автоматизації. Керуючими впливами при гідромоніторному розмиві є тиск і витрата води, швидкість руху струменя по стінці вибою та кут повороту гідромонітора, подача секцій телескопічного гідромонітора в забій.
Необхідність в керуванні тиском виникає із ряду причин:
- керування тиском необхідне для забезпечення ефективності процесу розмиву і енергозбереження, так як надлишковий тиск створює вруб в породу;
- надлишковий тиск розкидає розмиту породу по камері, що утруднює транспортування породи до піднімального пристрою;
- при оптимальному значенні тиску створюються умови для отримання пульпи з певною фракцією породи, необхідною для її ефективного транспортування та підйому;
- керування тиском при малих відстанях від насадки до стінки вибою запобігає заваленню каналу транспортування породи до піднімального пристрою.
Складність і умови проведення технологічного процесу підземного гідророзмиву створюють проблеми оперативного контролю за технологічними параметрами. Пропонується здійснювати управління процесом гідромоніторного розмиву на основі контролю відстані між насадкою гідромонітора і стінкою вибою та швидкості розмиву породи. Контроль за зміною розмірів камери виймання несе також інформацію про продуктивність процесу розмиву. Сучасні ультразвукові, акустичні та лазерні дальнеміри дають змогу проводити вимірювання відстані безконтактним способом з високою точністю та швидкістю. Використання ПЛК дозволить реалізовувати програмним способом складні закони регулювання та логічні схеми обробки інформації, будувати складні системи керування процесами свердловинного гідровидобутку.
Пропонується слідуючий алгоритм роботи системи. Сигнал з дальнеміра надходить до програмованого логічного контролера, який по різниці вимірюваних відстаней за певний час обраховує швидкість розмиву та видає керуючий сигнал по ПІД-законом на перетворювач частоти (ПЧ) і змінює таким чином тиск води у гідромоніторі, що призводить до зміни швидкості розмиву. При досягненні певної відстані між стінкою вибою та насадкою гідромонітора, ПЛК видає сигнал на висуненя чергової секції гідромонітора. Використання телескопічного гідромонітора дає змогу збільшити розміри камери розмиву без використання значно вищих тисків робочого агента. Після висунення оснанньої секції гідромонітора контролер збільшує тиск до максимально можливого. Для підтримання постійної лінійної швидкості струменя по стінці вибою використовується частотнорегульований привід для обертання гідромонітора навколо осі. При збільшенні відстані від насадки гідромонітора до стінки вибою лінійна швидкість струменя по стінці вибою збільшуватиметься, тому ПЛК подає сигнал керування за ПІ-законом на ПЧ та зменшує кутову швидкість обертання гідромонітора. Також для деяких технологічних схем видобутку необхідно керувати кутом повороту гідромонітора, тобто встановлювати сектор виймання породи. Після завершення розмиву на певній глибині ПЛК видає сигнал про необхідність зміни положення гідромонітора по висоті.
При розробці сучасних складних систем автоматизації технологічних процесів з використанням складної логіки та законів керування доцільно проводити моделювання цих систем на етапі проектування. Одним з найбільш потужних методів моделювання систем автоматизації є імітаційне моделювання з використанням спеціалізованих програмних продуктів, наприклад SIAM, LabVIEW, пакета MatLab/Simulink [4], програмного комплексу "МВТУ". Програмний додаток Simulink, із пакету MatLab фірми MathSoft, є одним з найпотужніших засобів імітаційного моделювання які орієнтовані на моделювання систем автоматизації. Simulink містить значну бібліотеку елементарних блоків та елементів систем автоматизації, має зручну структуру та інтерфейс, потужні математичні методи обробки даних та оптимізації, постійну підтримку та оновлення. Імітаційна Simulink-модель системи керування гідромоніторним розмивом при свердловинному гідровидобутку корисних копалин показана на рис.2.
Моделювання системи керування гідромоніторним розмивом при свердловинному гідровидобутку корисних копалин дозволить побудувати та дослідити логіку керування процесом, вибрати необхідні закони керування, що програмно реалізовуватимуться в ПЛК, а також здіснити пошук оптимальних настроювань регуляторів.
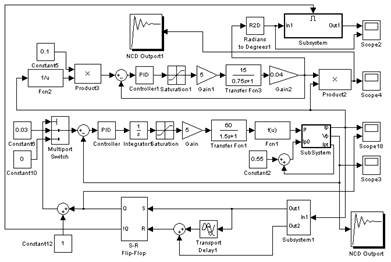
Рис. 2. Структурна схема системи керування гідромоніторним розмивом
Імітаційна модель об’єкта управлінна наведена на рис. 3. Блоки апроксимації функції двох змінних К і Т служать для автоматичного обрахунку коефіцієнтів передачі об’єкта та сталої часу [5]. В блоки вносяться масиви експериментальних даних, на основі яких здійснюється інтерполяція та екстраполяція лінійними або кубічними сплайнами.
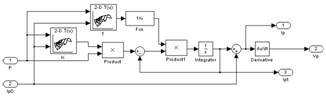
Рис. 3. Імітаційна модель об’єкта управлінна
На структурній схемі імітаційної Simulink-моделі (рис. 2.) блоки реалізують наступні передаточні функціії: Gain, Gain1 - частотного перетворювача, Gain2 – редуктора механізму повертання гідромонітора, Transfer Fcn1, Transfer Fcn3 – відповідно асинхронних двигунів приводу насоса та механізму повертання, Fcn1 - поршневого насоса, SubSystem - об’єкта регулювання, Controller - ПІД-регулятор швидкості розмиву, Controller1 - ПІ-регулятора швидкості руху струменя по стінці вибою. Для забезпечення астатизму в систему введена додаткова інтегруюча ланка Integrator1. Блоки SubSystem та SubSystem1, структурні схеми яких наведені на рис.4, здійснюють логічні операції по управлінню висуненням секцій та кутом повороту гідромонітора.
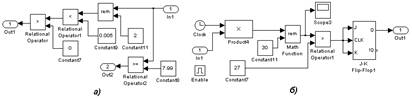
Рис. 4. Структурні схеми блоків SubSystem1 (а) та SubSystem (б)
Результатом моделювання системи керування гідромоніторним розмивом є перехідні характеристики та графіки переключень технологічних режимів роботи, зняті при завданні швидкості розмиву 0.03 м/с та при настроюваннях ПІД-регулятора швидкості розмиву Кп = 30, Кі = 4, Кд = 25; завданні ПІ-регулятора швидкості руху струменя по стінці вибою 0.1 м/с та настроюваннях Кп = 3.3, Кі = 5.75. Пошук настроювань регуляторів проводився з допомогою блоків параметричної оптимізації NCD Outport та NCD Outport1 із бібліотеки Simulink. Перехідна характеристики системи по дальності розмиву (рис. 5а) показує динаміку зміни дальності розмиву lP і відповідний їй графік керування подачею секцій телескопічного гідромонітора (рис. 5б). Тривалість сигналу висунення секції гідромонітора задається в блоці Transport Delay1. На рис. 5в зображена динаміка зміни кутової швидкості присторою повертання гідромонітора, а на рис. 5г графік переключення напрямку обертання гідромонітора.
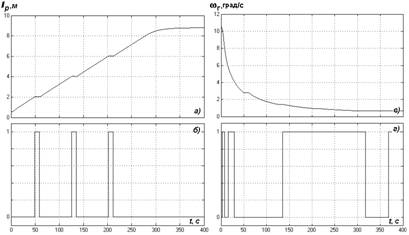
Рис. 5. Перехідні характеристики системи: а) по дальності розмиву; б) управління подачею секцій телескопічного гідромонітора; в) по кутовій швидкості гідромонітора; г) управління напрямком обертання гідромонітора
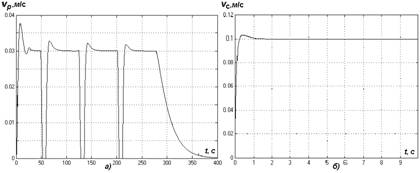
Рис. 6. Перехідні характеристики системи: а) по швидкості розмиву;
б) по швидкості руху струменя по стінці вибою
На рис. 6 показані перехідні характеристики системи по швидкості розмиву (а) та по швидкості руху струменя по стінці вибою (б). З перехідних характеристик видно, що система є стійкою та має необхідні динамічні характеристики і показники якості перехідних процесів.
В результаті дослідження процесу гідромоніторного розмиву породи при свердловинному гідровидобутку корисних копалин запропонована та побудована імітаційна Simulink-модель системи керування гідромоніторним розмивом на основі контролю швидкості та дальності розмиву, запропоновано алгоритм роботи придатний для програмної реалізації в промисловому логічному контролері. Результатом моделювання системи є динамічні характеристики системи в перехідних режимах та діаграми переключень станів системи. Реалізація даної системи забезпечить високі техніко-економічні показники процесу гідромоніторного розмиву.
Наведена імітаційна Simulink-модель може бути використана при проектуванні та розрахунку систем управління процесом гідромоніторного розмиву та основою для побудови гнучких систем управління з використанням адаптивних, екстремальних, самонастроювальних та нечітких методів керування, що дозволить використовувати їх для видобутку різних корисних копалин.
1. Проблеми та перспективи застосування свердловинної гідротехнології для розвитку мінерально-сировинної бази Рівненсько-Волинського регіону. , , – материалы седьмой международной Промышленной конференции 2007г., п. Славское. 134-136 с. 2. Маланчук основы скважинной гидротехнологии. – Ровно: РГТУ, 2002.-372 с. 3. Современные системы управления / Р. Дорф, Р. Бишоп; Пер. с англ. . – М.: Лаборатория базовых знаний, 2004. – 832 с.: илл. 4. MatLab в инженерных и нучных расчетах / , , – Одесса: Астропринт, 2003. – 214 с. 5. Matlab 6.5 SP1/7.0 Simulink 5/6. Серия «Библиотека профессионала». - М.: СОЛОН – Пресс, 2005. – 800 с.
