
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 624.13.002.5
, к. т.н., с. н.с., , ст. 4 курсу ФПМіКІС
(Національний університет водного господарства та природокористування,
м. Рівне)
Енергетичні показники дослідного зразка
штокопоршневого підземнорухомого пристрою
Визначено основні енергетичні показники дослідного зразка чотириступінчастого штокопоршневого підземнорухомого пристрою
Basic energetic proofs of the experimental sample of pivot-piston underground moving device were researched
На основі біологічного прототипу розроблено штокопоршневий багатоступінчастий підземнорухомий пристрій (ПРП) багатоцільового призначення [1] і проведено його аналітичні й експериментальні дослідження [2, 3].
Проте визначені геометричні параметри корпусу ПРП, без знання його енергетичних показників, унеможливлюють розробку і створення раціональних конструкцій.
У зв’язку з цим, було розроблено і виготовлено стенд (рис.1) для проведення експериментів по визначенню його енергетичних показників.
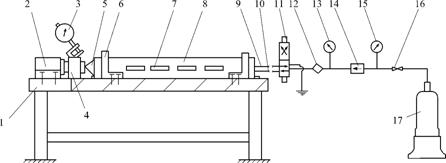
Рис.1. Стенд для дослідження енергетичних показників ПРП:
1- металева основа; 2- опора; 3- індикатор годинникового типу;
4- силовий пружній елемент; 5- носова частина; 6- фіксатор; 7- щілини;
8- труба; 9,10- шланги високого тиску, 11- реверсивний розподілювач;
12- маслорозприскувач; 13, 15- манометри до і після регулятора тиску 14; 16- запірний пристрій; 17- балон із стиснутим газом
До металевої основи 1 стенду прикріплено за допомогою зварних фіксаторів 6 металеву трубу 8, діаметр та довжина якої задається згідно програми досліджень.
Для визначення сили, яку розвиває носова частина 5 ПРП, в стенді передбачено вимірювальний вузол, що складається з опори 2 та прикріпленого до неї тильною стороною силового пружного елемента 4 переносного зразкового динамометра, наприклад, ДОСМ-3-0,05, ДОСМ-3-0,1 або ДОСМ-3-1. Передня частина зазначеного елемента сприймає силу дії носової частини 5 досліджуваного ПРП, що знаходиться у трубі 8.
Відлік показів береться по шкалі індикатора 3 годинникового типу, а їх дешифрування проводиться за допомогою градуювальних кривих, що додаються до приладів.
Щілини 7 на трубі 8 дозволяють проводити візуальне спостереження руху ПРП. За допомогою гнучких трубопроводів високого тиску 9 та 10 відбувається підведення до пристрою від зовнішнього джерела живлення імпульсів тиску робочого тіла, зсунутих за часом й амплітудою та відведення відпрацьованого енергоносія у зворотному напрямку.
Джерело живлення складається з вуглекислотного балона 17, що зв‘язаний з реверсивним розподілювачем 11 через запірний пристрій 16 та регулятор тиску 14. Маслорозприскувач 12 забезпечує неперервне змащення ковзаючих пар пристрою.
Манометри 15 й 13 призначені для індикації тиску робочого тіла в системі до та після регулятора тиску 14.
Стенд оснащено електронним секундоміром (на рис.1 не показано), що дозволяє проводити широкий спектр експериментів.
Досліджуваний, за допомогою зазначеного стенда, ПРП довжиною L (рис.2) представляє собою конструкцію, яка складається з носової частини 1, відповідно передньої та задньої фіксуючих камер, охоплених еластичними оболонками 2 і 4 та чотириступінчастого лінійного газопневмодвигуна 3, всередині якого в ізольованих між собою камерах реверсивно переміщується штокопоршень (шток з фіксованими чотирма поршнями) [3, 4].
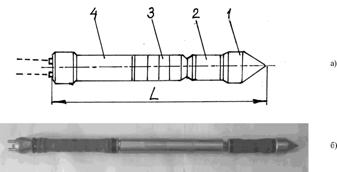
Рис.2. Спрощена конструктивна схема (а) та загальний вид (б)
дослідного зразка ПРП
Принцип дії даного ПРП, в процесі переміщення, наведено на рис.3.
б) а)
Рис.3. Процес переміщення ПРП
![]() і
і ![]() - відповідно сила лобового опору та тертя циліндричної частини носу об середовище, які визначаються згідно [5,6];
- відповідно сила лобового опору та тертя циліндричної частини носу об середовище, які визначаються згідно [5,6]; ![]() - сила, яку розвиває ніс;
- сила, яку розвиває ніс;![]() і
і ![]() - відповідно сила фіксації хвостової і носової частин ПРП;
- відповідно сила фіксації хвостової і носової частин ПРП; ![]() - вага хвостової частини;
- вага хвостової частини; ![]() - сила опору підтягування хвостової частини до фіксованої носової;
- сила опору підтягування хвостової частини до фіксованої носової; ![]() - тиск робочого тіла;
- тиск робочого тіла; ![]() та
та ![]() - відповідно початкова і кінцева довжина ПРП;
- відповідно початкова і кінцева довжина ПРП; ![]() - переміщення носової частини відносно фіксованої хвостової (“крок”)
- переміщення носової частини відносно фіксованої хвостової (“крок”)
Із рис.3 видно, що при фіксації хвостової частини відбувається просування вперед на величину ![]() носової частини, а при фіксованій носовій частині – підтягування до неї на цю ж довжину
носової частини, а при фіксованій носовій частині – підтягування до неї на цю ж довжину ![]() хвостової частини. Періодичне повторення цього процесу обумовлює реалізацію нового різновиду поступального руху, названого розпірно-дискретним [4].
хвостової частини. Періодичне повторення цього процесу обумовлює реалізацію нового різновиду поступального руху, названого розпірно-дискретним [4].
Із аналізу конструкції ПРП [1] і результатів прямих і непрямих вимірювань, сили ![]() і
і ![]() , які розвивають відповідно газопневмодвигун і носова частина залежать як від тиску
, які розвивають відповідно газопневмодвигун і носова частина залежать як від тиску ![]() робочого тіла і кількості ступенів
робочого тіла і кількості ступенів ![]() , так і від одночасної їхньої зміни (рис.4).
, так і від одночасної їхньої зміни (рис.4).
Апроксимація експериментальних даних дозволила отримати для сили ![]() наступну залежність
наступну залежність
 , (1)
, (1)
де ![]() - коефіцієнт пропорційності, який залежить від кількості ступенів
- коефіцієнт пропорційності, який залежить від кількості ступенів ![]() і значення якого наведено в табл. 1.
і значення якого наведено в табл. 1.
Таблиця 1
Значення коефіцієнта ![]() , залежно від кількості ступенів
, залежно від кількості ступенів ![]()
лінійного газопневмодвигуна в межах тиску ![]() від 0,1 до 0,6 МПа.
від 0,1 до 0,6 МПа.
|
|
І | 1,65 |
I+ІІ | 3,30 |
I+II+ІІІ | 4,95 |
I+II+III+IV | 6,60 |
Із аналізу графічно представлених результатів на рис. 4 випливає,
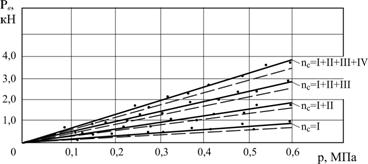
Рис.4. Залежність сил ![]() (суцільна лінія) і
(суцільна лінія) і ![]() (пунктирна лінія)
(пунктирна лінія)
від тиску ![]() робочого тіла і кількості ступенів
робочого тіла і кількості ступенів ![]()
що
![]() , (2)
, (2)
де ![]() - сила протидії переміщенню штокопоршня в процесі відведення із ПРП відпрацьованого робочого тіла.
- сила протидії переміщенню штокопоршня в процесі відведення із ПРП відпрацьованого робочого тіла.
Опрацювання результатів досліджень дозволило підібрати аналітичні вирази для визначення як сили ![]() так і
так і ![]() , які наведено нижче.
, які наведено нижче.
![]() , (3)
, (3)
де ![]() ,
, ![]() - відповідно, діаметри поршнів і штока штокопоршня.
- відповідно, діаметри поршнів і штока штокопоршня.
В свою чергу сила ![]() добре описується аналітичним виразом виду:
добре описується аналітичним виразом виду:
 , (4)
, (4)
де ![]() - максимальний тиск робочого тіла для даного ПРП (
- максимальний тиск робочого тіла для даного ПРП (![]() =0,6МПа);
=0,6МПа); ![]() - сила протидії однієї ступені (
- сила протидії однієї ступені (![]() =0,06кН).
=0,06кН).
Із (2), (3) і (4) маємо
![]() . (5)
. (5)
Аналіз отриманих результатів вказує на те, що з’єднання ступенів чотириступінчастого штокопоршневого газопневмодвигуна ПРП повинно бути паралельним.
Схематично це наведено на рис. 5.
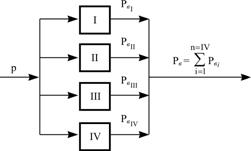
Рис.5. Схема паралельного з’єднання ступенів в чотириступінчастому штокопоршневому газопневмодвигуні,
I, II, III та IV нумерація ступенів
При такому з’єднанні тиск ![]() робочого тіла перетворюється в силу, яку розвиває кожна із ступеней
робочого тіла перетворюється в силу, яку розвиває кожна із ступеней ![]() (
(![]() ,
,![]() ,
,![]() і
і ![]() ), і які сумуючись утворюють силу
), і які сумуючись утворюють силу ![]() .
.
Із аналізу конструктивної схеми [1], видно, що енергія кожного “кроку” штокопоршневого ПРП при просуванні вперед носової частини, в разі необхідності, може також змінюватись не тільки від тиску робочого тіла, а й від кількості ступенів та одночасно від обох названих чинників. Це представлено на рис.6.
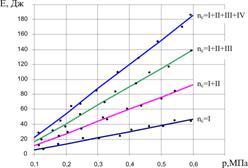
Рис.6. Залежність енергії ![]() одного “кроку” ПРП
одного “кроку” ПРП
від тиску ![]() робочого тіла та кількості ступенів
робочого тіла та кількості ступенів ![]()
Із аналізу рис. 6 видно, що енергія ![]() , яка підводиться до носової частини ПРП в процесі руху (деформування грунту), може змінюватися в широких межах. Величина її лінійно залежить як від тиску
, яка підводиться до носової частини ПРП в процесі руху (деформування грунту), може змінюватися в широких межах. Величина її лінійно залежить як від тиску ![]() робочого тіла, так і кількості ступенів
робочого тіла, так і кількості ступенів ![]() .
.
Аналіз результатів досліджень, представлених графічно на рис. 6, дозволив підібрати аналітичний вираз виду
![]() , (6)
, (6)
де ![]() =44,6 Дж – енергія одного “кроку” дослідного зразка одноступінчастого штокопоршневого ПРП.
=44,6 Дж – енергія одного “кроку” дослідного зразка одноступінчастого штокопоршневого ПРП.
Таким чином при ![]() =0,05м,
=0,05м, ![]() =0,02м,
=0,02м, ![]() =4,
=4, ![]() =0,24кН,
=0,24кН, ![]() =0,5МПа,
=0,5МПа, ![]() =3,04кН, масі ПРП 8,3кг, швидкість його руху
=3,04кН, масі ПРП 8,3кг, швидкість його руху ![]() залежно від сили опору носовій частині (
залежно від сили опору носовій частині (![]() ), коливається в межах від 0,012 до 0,018 м/с. При цьому потужність лінійного газопневмодвигуна становить 1,6кВт.
), коливається в межах від 0,012 до 0,018 м/с. При цьому потужність лінійного газопневмодвигуна становить 1,6кВт.
Отримані результати є підґрунтям для створення методики інженерного розрахунку й проектування ПРП такого типу і дозволяють розробляти одно - і багатоступінчасті пристрої підвищеної ефективності багатоцільового призначення шляхом забезпечення відповідності параметрів реальним грунтовим умовам.
1. Патент України № 000 та РФ № 000 Пристрій для проходження свердловин в грунті / , та інші, опубл. 1995. 2. Кованько інчастий газорідинний штокопоршневий підземнорухомий пристрій з двома гальмівними камерами // Вісник Рівненського державного технічного університету. Гідромелірація та гідротехнічне будівництво: Зб. наук. праць, спец. випуск. – Рівне, 1999. – С.315-321. 3. Кованько дослідження експериментального зразка чотириступінчастого газорідинного штокопоршневого підземнорухомого пристрою // Вісник Рівненського державного технічного університету: Зб. наук. праць.- Рівне, 2000.- Вип. 1(3).- С.166-171. 4. Кованько формування нових технічних рішень підземнорухомих пристроїв підвищеної ефективності на біонічній основі // Вісник Національного університету водного господарства та природокористування: Зб. наук. праць. – Рівне, 2006. – Вип.2(34). – С.209-216. 5. , Кованько швидкості на форму та силу опору носової частини підземнорухомих пристроїв // Вісник Харківського національного автомобільно-дорожнього університету: Зб. наук праць. – Харків, 2007.–Вип.38.– С. 101-104. 6. , Кованько деяких параметрів системи грунт-фіксуюча камера підземнорухомих пристроїв // Вісник Національного університету водного господарства та природокористування: Зб. наук. праць. – Рівне, 2007. – Вип.3(39). – С.226-235.
